作者丨ycszen
来源|https://zhuanlan.zhihu.com/p/22252270
编辑丨极市平台
导读
本文仅对一些常见的优化方法进行直观介绍和简单的比较。
前言
本文仅对一些常见的优化方法进行直观介绍和简单的比较,各种优化方法的详细内容及公式只好去认真啃论文了,在此我就不赘述了。
SGD
此处的SGD指mini-batch gradient descent,关于batch gradient descent, stochastic gradient descent, 以及 mini-batch gradient descent的具体区别就不细说了。现在的SGD一般都指mini-batch gradient descent。
SGD就是每一次迭代计算mini-batch的梯度,然后对参数进行更新,是最常见的优化方法了。即:
其中, 是学习率,
是学习率, 是梯度 SGD完全依赖于当前batch的梯度,所以 可理解为允许当前batch的梯度多大程度影响参数更新
是梯度 SGD完全依赖于当前batch的梯度,所以 可理解为允许当前batch的梯度多大程度影响参数更新
缺点:(正因为有这些缺点才让这么多大神发展出了后续的各种算法)
选择合适的learning rate比较困难 - 对所有的参数更新使用同样的learning rate。对于稀疏数据或者特征,有时我们可能想更新快一些对于不经常出现的特征,对于常出现的特征更新慢一些,这时候SGD就不太能满足要求了
SGD容易收敛到局部最优,并且在某些情况下可能被困在鞍点【原来写的是“容易困于鞍点”,经查阅论文发现,其实在合适的初始化和step size的情况下,鞍点的影响并没这么大。感谢@冰橙的指正】
Momentum
momentum是模拟物理里动量的概念,积累之前的动量来替代真正的梯度。公式如下:
其中, 是动量因子
是动量因子
特点:
下降初期时,使用上一次参数更新,下降方向一致,乘上较大的 能够进行很好的加速
能够进行很好的加速
下降中后期时,在局部最小值来回震荡的时候, , 使得更新幅度增大,跳出陷阱
, 使得更新幅度增大,跳出陷阱
在梯度改变方向的时候, 能够减少更新 总而言之,momentum项能够在相关方向加速SGD,抑制振荡,从而加快收敛
能够减少更新 总而言之,momentum项能够在相关方向加速SGD,抑制振荡,从而加快收敛
Nesterov
nesterov项在梯度更新时做一个校正,避免前进太快,同时提高灵敏度。将上一节中的公式展开可得:

可以看出, 并没有直接改变当前梯度 ,所以Nesterov的改进就是让之前的动量直接影响当前的动量。即:
,所以Nesterov的改进就是让之前的动量直接影响当前的动量。即:

所以,加上nesterov项后,梯度在大的跳跃后,进行计算对当前梯度进行校正。如下图:
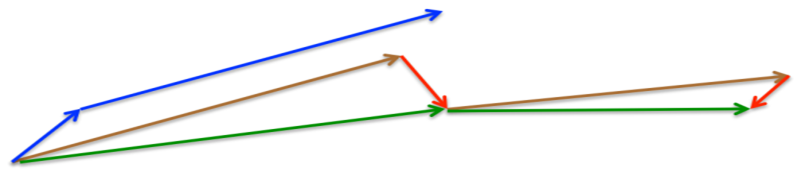
momentum首先计算一个梯度(短的蓝色向量),然后在加速更新梯度的方向进行一个大的跳跃(长的蓝色向量),nesterov项首先在之前加速的梯度方向进行一个大的跳跃(棕色向量),计算梯度然后进行校正(绿色梯向量)
其实,momentum项和nesterov项都是为了使梯度更新更加灵活,对不同情况有针对性。但是,人工设置一些学习率总还是有些生硬,接下来介绍几种自适应学习率的方法
Adagrad
Adagrad其实是对学习率进行了一个约束。即:
此处,对 从1到
从1到 进行一个递推形成一个约束项regularizer,
进行一个递推形成一个约束项regularizer, , e用来保证分母非0
, e用来保证分母非0
特点:
缺点:
由公式可以看出,仍依赖于人工设置一个全局学习率
 设置过大的话,会使regularizer过于敏感,对梯度的调节太大
设置过大的话,会使regularizer过于敏感,对梯度的调节太大
中后期,分母上梯度平方的累加将会越来越大,使 ,使得训练提前结束
,使得训练提前结束
Adadelta
Adadelta是对Adagrad的扩展,最初方案依然是对学习率进行自适应约束,但是进行了计算上的简化。Adagrad会累加之前所有的梯度平方,而Adadelta只累加固定大小的项,并且也不直接存储这些项,仅仅是近似计算对应的平均值。即:
在此处Adadelta其实还是依赖于全局学习率的,但是作者做了一定处理,经过近似牛顿迭代法之后:
其中, 代表求期望。
代表求期望。
此时,可以看出Adadelta已经不用依赖于全局学习率了。
特点:
训练初中期,加速效果不错,很快
训练后期,反复在局部最小值附近抖动
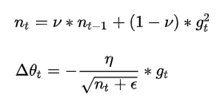
RMSprop
RMSprop可以算作Adadelta的一个特例:
当 时,
时, 就变为了求梯度平方和的平均数。
就变为了求梯度平方和的平均数。
如果再求根的话,就变成了RMS(均方根):
此时,这个RMS就可以作为学习率 的一个约束:
的一个约束:
特点:
Adam
Adam(Adaptive Moment Estimation)本质上是带有动量项的RMSprop,它利用梯度的一阶矩估计和二阶矩估计动态调整每个参数的学习率。Adam的优点主要在于经过偏置校正后,每一次迭代学习率都有个确定范围,使得参数比较平稳。公式如下:

其中, ,
, 分别是对梯度的一阶矩估计和二阶矩估计,可以看作对期望
分别是对梯度的一阶矩估计和二阶矩估计,可以看作对期望 ,
, 的估计;
的估计; ,
, 是对
是对  ,
, 的校正,这样可以近似为对期望的无偏估计。可以看出,直接对梯度的矩估计对内存没有额外的要求,而且可以根据梯度进行动态调整,而 对学习率形成一个动态约束,而且有明确的范围。
的校正,这样可以近似为对期望的无偏估计。可以看出,直接对梯度的矩估计对内存没有额外的要求,而且可以根据梯度进行动态调整,而 对学习率形成一个动态约束,而且有明确的范围。
特点:
Adamax
Adamax是Adam的一种变体,此方法对学习率的上限提供了一个更简单的范围。公式上的变化如下:
可以看出,Adamax学习率的边界范围更简单
Nadam
Nadam类似于带有Nesterov动量项的Adam。公式如下:
可以看出,Nadam对学习率有了更强的约束,同时对梯度的更新也有更直接的影响。一般而言,在想使用带动量的RMSprop,或者Adam的地方,大多可以使用Nadam取得更好的效果。
经验之谈
对于稀疏数据,尽量使用学习率可自适应的优化方法,不用手动调节,而且最好采用默认值 SGD通常训练时间更长,但是在好的初始化和学习率调度方案的情况下,结果更可靠 如果在意更快的收敛,并且需要训练较深较复杂的网络时,推荐使用学习率自适应的优化方法。Adadelta,RMSprop,Adam是比较相近的算法,在相似的情况下表现差不多。 在想使用带动量的RMSprop,或者Adam的地方,大多可以使用Nadam取得更好的效果
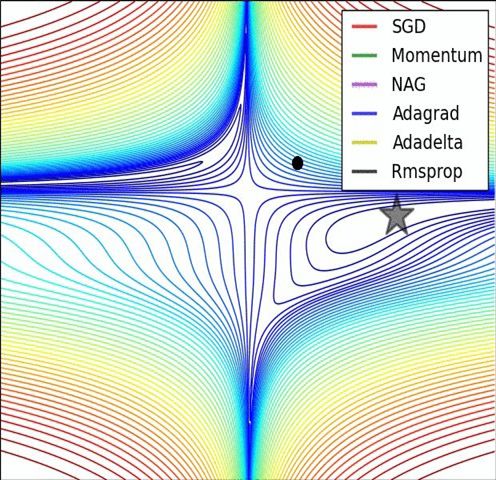
最后展示两张可厉害的图,一切尽在图中啊,上面的都没啥用了... ...
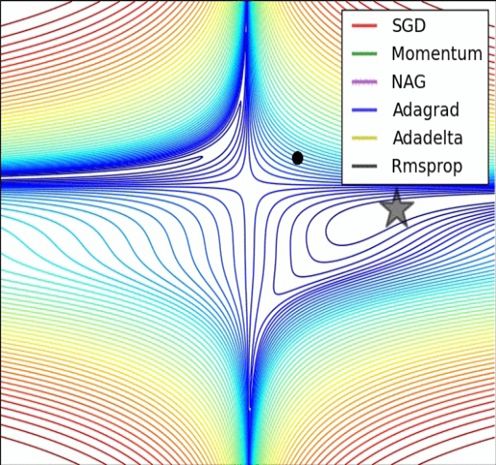
损失平面等高线
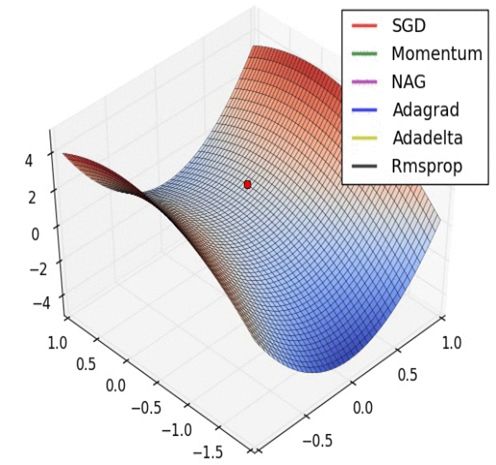
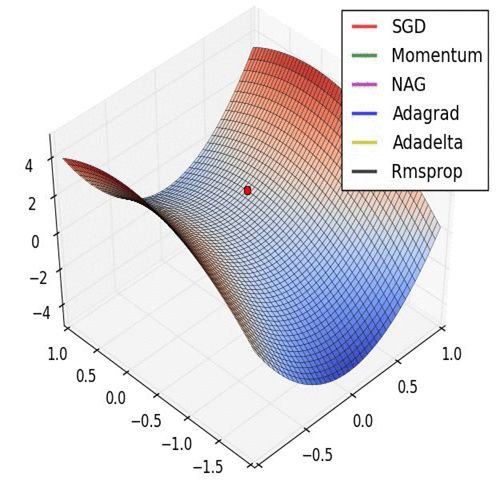
在鞍点处的比较
引用:
[1]Adagrad(http://www.jmlr.org/papers/volume12/duchi11a/duchi11a.pdf)
[2]RMSprop[Lecture 6e]
(http://www.cs.toronto.edu/~tijmen/csc321/lecture_notes.shtml)
[3]Adadelta(http://arxiv.org/abs/1212.5701)
[4]Adam(http://arxiv.org/abs/1412.6980v8)
[5]Nadam(http://cs229.stanford.edu/proj2015/054_report.pdf)
[6]On the importance of initialization and momentum in deep learning
(http://www.cs.toronto.edu/~fritz/absps/momentum.pdf)
[7]Keras中文文档(http://keras-cn.readthedocs.io/en/latest/)
[8]Alec Radford(https://twitter.com/alecrad)
[9]An overview of gradient descent optimization algorithms
(http://sebastianruder.com/optimizing-gradient-descent/)
[10]Gradient Descent Only Converges to Minimizers
(http://www.jmlr.org/proceedings/papers/v49/lee16.pdf)
[11]Deep Learning:Nature
(http://www.nature.com/nature/journal/v521/n7553/abs/nature14539.html)
本文仅做学术分享,如有侵权,请联系删文。
重磅!计算机视觉工坊-学习交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有ORB-SLAM系列源码学习、3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、深度估计、学术交流、求职交流等微信群,请扫描下面微信号加群,备注:”研究方向+学校/公司+昵称“,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进去相关微信群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、可答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~
 较小的时候, regularizer较大,能够放大梯度
较小的时候, regularizer较大,能够放大梯度  较大的时候,regularizer较小,能够约束梯度
较大的时候,regularizer较小,能够约束梯度