
之前做电机相关的项目比较少,最近有个项目涉及到步进电机的精确控制,参考了一些资料研究了一下S型曲线加减速,这里总结一下分享给大家。
硬件是:STM32+驱动器+步进电机。
STM32定时器输出PWM,控制驱动器来驱动步进电机。单片机只要控制电机方向,以及PWM的频率即可,具体驱动由驱动器实现。
首先说一下什么是S型曲线加速,为什么要S型曲线加速。
S型曲线加速是指步进电机的启动速度按照S型曲线逐渐增加,以达到设定的最大速度。具体的S型曲线方程如下:

x取值-5~5的曲线图如下:
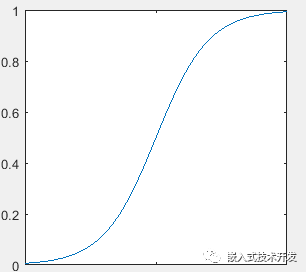
可以看到,刚开始加速和达到最大速度时加速比较缓慢,中间加速比较快。
电机的转矩和转速的乘积的k倍等于功率,也就是说,功率一定的时候,转速与转矩成反比关系。所以,转速越低,转矩越大。当电机直接高速启动时,电机可能存在震动、丢步甚至启动不起来的情况。因此需要S型曲线加速,使电机能够缓慢启动。
程序实现
控制电机的速度,其实就是控制PWM的输出频率。首先需要对S曲线方程进行一些变化,如下:
Fcurrent = Fmin + (Fmax-Fmin)/(1+exp( -Flexible(i - num )/num) )
上面计算出的是频率的S曲线,还需要将频率转换成定时器的计数周期,程序如下:
//功能:S加速曲线初始化
//参数1 *pbuff 计算出的定时器的周期
//参数2 fre_max 最大频率 Hz
//参数3 fre_min 最小频率 Hz
//参数4 len 加速需要的脉冲数
void CurveS_init(uint16_t *pbuff,uint32_t fre_max,uint32_t fre_min,int16_t len)
{
int16_t i;
uint16_t flexible =4;
float delt = fre_max-fre_min;
float deno ;
float melo ;
float fre;
for(i=0; i<len; i++)
{
melo = flexible* (i-len/2) / (len/2);
deno = 1.0f / (1 + expf(-melo)); //
fre = delt * deno + fre_min;
*pbuff++ = (unsigned short)(TIM2_CLOCK_FREQ / fre);
}
}
TIM2_CLOCK_FREQ为定时器的计数频率。
之后要做的就是在加减速过程中,每输出一个PWM脉冲,重新装载一次定时器周期。具体怎样输出指定个数PWM来控制步进电机,可参考之前的文章《STM32定时器产生指定个数脉冲》。
在PWM中断中,将计算好的S曲线数组,重新装载到定时器的ARR和CCR寄存器中即可。程序如下:
//PWM回调函数
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
Motor.PWMcount++;
SpeedAdjust();//速度调节
}
//速度调节函数
void SpeedAdjust(void)
{
switch(Motor.Status)
{
/*加速*/
case SPEED_INCREASE:
if(Motor.Count < Motor.CountMax)
{
__HAL_TIM_SET_AUTORELOAD(&htim2,Period[Motor.Count]);//计算下一个PWM的周期
htim2.Instance->CCR1 = Period[Motor.Count]/2;//占空比50%
Motor.Count++;//加速次数
}
else
{
Motor.Status = SPEED_STABLE;
Motor.Count--;
}
break;
/*匀速*/
case SPEED_STABLE:
if(Motor.PWMcount >= (Motor.PWMneed - Motor.Count))
{
Motor.Status = SPEED_DECREASE;
}
break;
/*减速*/
case SPEED_DECREASE:
if(Motor.Count >= 0)
{
__HAL_TIM_SET_AUTORELOAD(&htim2,Period[Motor.Count]);//计算下一个PWM的周期
htim2.Instance->CCR1 = Period[Motor.Count]/2;
Motor.Count--;
}
if(Motor.PWMcount >= Motor.PWMneed)
{
HAL_TIM_PWM_Stop_IT(&htim2,TIM_CHANNEL_1);
}
break;
default :
break;
}
其中Motor是自己定义的一个结构体:
typedef struct{
uint8_t Status; //状态
int32_t Count; //加减速过程脉冲计数
int32_t CountMax; //最大加速脉冲数
uint32_t PWMcount;//PWM计数
uint32_t PWMneed; //需要输出的PWM总数
}Motor_t;
启动时,初始化参数,启动定时器输出PWM即可:
//PWM--需要输出的脉冲个数
void StartPWM(uint32_t PWM)
{
Motor.PWMcount = 0;
Motor.PWMneed = PWM;
Motor.Count = 0;
Motor.Status = SPEED_INCREASE;
Motor.CountMax = 300;
//初始化加速曲线,最小频率100,最大频率10K,加速脉冲数300
CurveS_init(Period,10000,100,Motor.CountMax);
__HAL_TIM_SET_AUTORELOAD(&htim2,Period[0]);
htim2.Instance->CCR1 = Period[0];
HAL_TIM_PWM_Start_IT(&htim2, TIM_CHANNEL_1); //启动定时器PWM输出
}
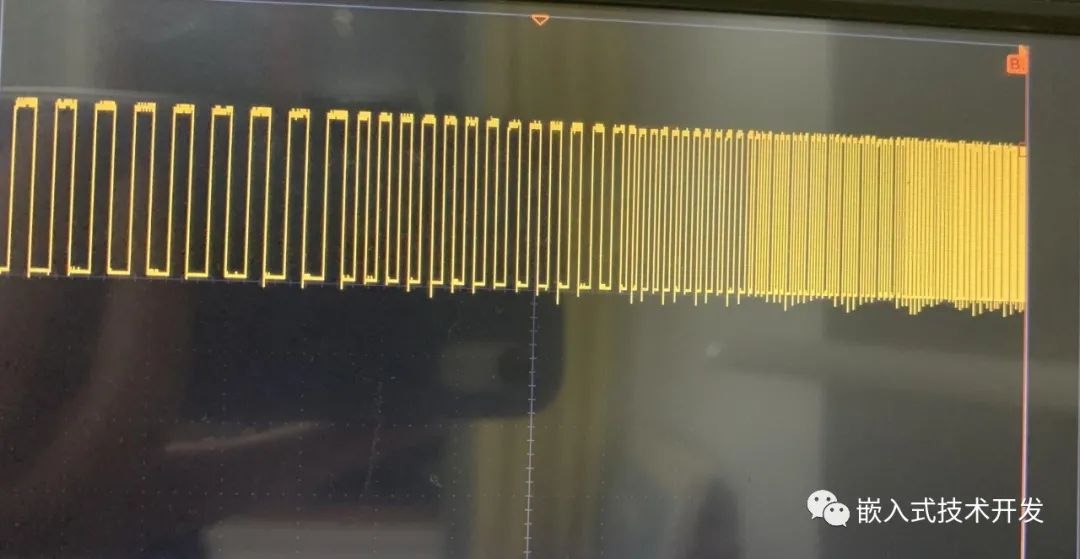
来看一下效果,可以看到,PWM的频率是逐渐增大的。实际测试效果也不错。
推荐阅读:
STM32F4通过U盘升级程序
STM32CubeMX系列教程
STM32定时器应用合集
欢迎关注公众号"嵌入式技术开发",大家可以后台给我留言沟通交流。如果觉得该公众号对你有所帮助,也欢迎推荐分享给其他人。