一,首先我们对函数先进行分析
findHomography:
计算多个二维点对之间的最优单映射变换矩阵 H(3行x3列) (就是对图片的矫正),使用最小均方误差或者RANSAC方法
函数功能:找到两个平面之间的转换矩阵。

这里涉及到映射变换的知识,
下面介绍下什么是映射变换:
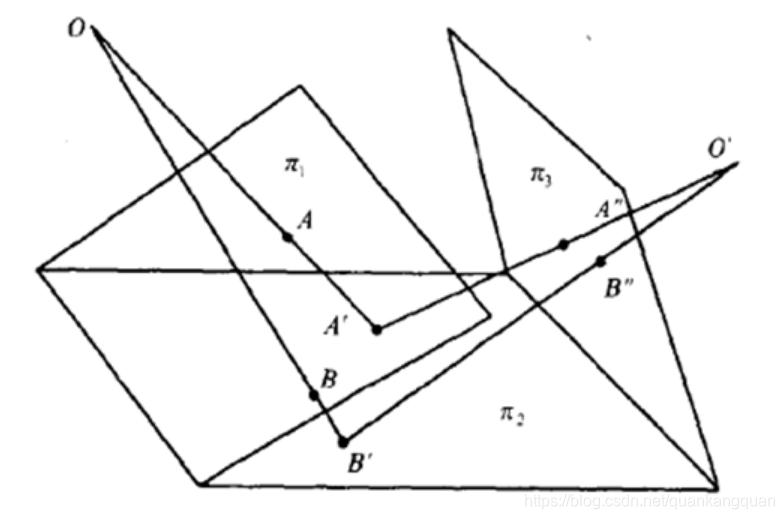
1,如下图所示:
如果平面上点场的点建立了一个一一对应,并且满足:
(1)任何共线三点的象仍是共线三点;
(2)共线四点的交比不变。
则这个一一对应叫做点场的射影变换,简称射影变换
交比: 
一维射影变换:

二维的图像是这样的
射影变换也叫做单应(Homography)


图1通过H矩阵变换变成图2,就是这个函数的公式
X′=HX
X′代表图2
其操作过程
- 在“大”图像(目标图像)上选择4个点和“小”图像(被合并图像)的四角做对应,然后根据这4对对应的点计算两幅图像的单应矩阵。
- 得到单应矩阵H后,利用函数warpPerspective将H应用到“小”图像上,得到图像M
- 将图像M合并到目标图像中选择的四个点的位置

Mat cv::findHomography ( InputArray srcPoints,
InputArray dstPoints,
int method = 0,
double ransacReprojThreshold = 3,
OutputArray mask = noArray(),
const int maxIters = 2000,
const double confidence = 0.995
)
参数详解:
srcPoints 源平面中点的坐标矩阵,可以是CV_32FC2类型,也可以是vector<Point2f>类型
dstPoints 目标平面中点的坐标矩阵,可以是CV_32FC2类型,也可以是vector<Point2f>类型
method 计算单应矩阵所使用的方法。不同的方法对应不同的参数,具体如下:
0 - 利用所有点的常规方法
RANSAC - RANSAC-基于RANSAC的鲁棒算法
LMEDS - 最小中值鲁棒算法
RHO - PROSAC-基于PROSAC的鲁棒算法
ransacReprojThreshold
将点对视为内点的最大允许重投影错误阈值(仅用于RANSAC和RHO方法)。如果
则点被认为是个外点(即错误匹配点对)。若srcPoints和dstPoints是以像素为单位的,则该参数通常设置在1到10的范围内。
mask
可选输出掩码矩阵,通常由鲁棒算法(RANSAC或LMEDS)设置。 请注意,输入掩码矩阵是不需要设置的。
maxIters RANSAC 算法的最大迭代次数,默认值为2000。
confidence 可信度值,取值范围为0到1.
首先定义两个vector保存对应的4对点
//图片映射矩阵把不同角度的图片矫正
void findHomographyText(){
// Read source image.
Mat src = imread("F:\\视觉\\opencv\\pic\\1.png");
// Four corners of the book in source image
vector<Point2f> pts_src;
pts_src.push_back(Point2f(0, 0));
pts_src.push_back(Point2f(src.cols, 0));
pts_src.push_back(Point2f(src.cols, src.rows));
pts_src.push_back(Point2f(0, src.rows));
// Four corners of the book in destination image.
vector<Point2f> pts_dst;
pts_dst.push_back(Point2f(0, 0));
pts_dst.push_back(Point2f(src.cols/4, 0));
pts_dst.push_back(Point2f(src.cols/3, src.rows));
pts_dst.push_back(Point2f(0, src.rows/2));
// Calculate Homography
Mat h = findHomography(pts_src, pts_dst);
// Output image
Mat im_out;
// Warp source image to destination based on homography
warpPerspective(src, im_out, h, src.size());
// Display images
imshow("Source Image", src);
imshow("Warped Source Image", im_out);
waitKey(0);
}
结果如下图所示对图像进行拉伸

步骤如下
1,相求H
vector<Point2f> pts_src;
pts_src.push_back(Point2f(0, 0));
pts_src.push_back(Point2f(src.cols, 0));
pts_src.push_back(Point2f(src.cols, src.rows));
pts_src.push_back(Point2f(0, src.rows));
// Four corners of the book in destination image.
vector<Point2f> pts_dst;
pts_dst.push_back(Point2f(0, 0));
pts_dst.push_back(Point2f(src.cols/4, 0));
pts_dst.push_back(Point2f(src.cols/3, src.rows));
pts_dst.push_back(Point2f(0, src.rows/2));
// Calculate Homography
Mat h = findHomography(pts_src, pts_dst);
通过H求对应的图像(映射到输出图片上)
warpPerspective(src, im_out, h, src.size());
warpPerspective:通过H求取
im_out输出值介绍完两个主要的函数下面开始对图像进行识别和标记
2,SURF对图像的识别和标记
1,开发思路
(1)使用SIFT或者SURF进行角点检测,获取两个图像的的角点集合
(2)根据两个集合,使用特征点匹配,匹配类似的点 FlannBasedMatcher
(3)过滤特征点对。
(4)通过特征点对,求出H值
(5)画出特征区域
代码实现:
1,使用SIFT或者SURF进行角点检测,获取两个图像的的角点集合
src = imread("F:\\视觉\\opencv\\pic\\11.png");//读图片
src3 = imread("F:\\视觉\\opencv\\pic\\5.png");//读图片
int minHessian = 400;
cvtColor(src, src, COLOR_BGR2GRAY);
cvtColor(src3, src3, COLOR_BGR2GRAY);
Ptr<SIFT> detector = SIFT::create(minHessian);
vector<KeyPoint> keypoints_obj;//图片1特征点
vector<KeyPoint> keypoints_scene;//图片2特征点
Mat descriptor_obj, descriptor_scene;
//找出特征点存到keypoints_obj与keypoints_scene点集中
detector->detectAndCompute(src, Mat(), keypoints_obj, descriptor_obj);
detector->detectAndCompute(src3, Mat(), keypoints_scene, descriptor_scene);
// matching 找到特征集合
FlannBasedMatcher matcher;
vector<DMatch> matches;
matcher.match(descriptor_obj, descriptor_scene, matches);
2,过滤相似度高的图像
// find good matched points
double minDist = 1000;
double maxDist = 0;
for (int i = 0; i < descriptor_obj.rows; i++) {
double dist = matches[i].distance;
if (dist > maxDist) {
maxDist = dist;
}
if (dist < minDist) {
minDist = dist;
}
}
printf("max distance : %f\n", maxDist);
printf("min distance : %f\n", minDist);
vector<DMatch> goodMatches;
//过滤相同的点
for (int i = 0; i < descriptor_obj.rows; i++) {
double dist = matches[i].distance;//相识度
printf("distance : %f\n", dist);
if (dist < max(3 * minDist, 0.2)) {
goodMatches.push_back(matches[i]);
}
}
3,求出H
vector<Point2f> obj;
vector<Point2f> objInScene;
for (size_t t = 0; t < goodMatches.size(); t++) {
//把DMatch转成坐标 Point2f
obj.push_back(keypoints_obj[goodMatches[t].queryIdx].pt);
objInScene.push_back(keypoints_scene[goodMatches[t].trainIdx].pt);
}
//用来求取“射影变换”的H转制矩阵函数 X'=H X ,并使用RANSAC消除一些出错的点
Mat H = findHomography(obj, objInScene, RANSAC);
4,使用H求出映射到大图的点
vector<Point2f> obj_corners(4);
vector<Point2f> scene_corners(4);
obj_corners[0] = Point(0, 0);
obj_corners[1] = Point(src.cols, 0);
obj_corners[2] = Point(src.cols, src.rows);
obj_corners[3] = Point(0, src.rows);
//透视变换(把斜的图片扶正)
cout << H << endl;
perspectiveTransform(obj_corners, scene_corners, H);
5,在原图上画线段
| 1 2 3 4 5 6 7 8 9 |
Mat dst;
cvtColor(src3, dst, COLOR_GRAY2BGR);
line(dst, scene_corners[0], scene_corners[1], Scalar(0, 0, 255), 2, 8, 0);
line(dst, scene_corners[1], scene_corners[2], Scalar(0, 0, 255), 2, 8, 0);
line(dst, scene_corners[2], scene_corners[3], Scalar(0, 0, 255), 2, 8, 0);
line(dst, scene_corners[3], scene_corners[0], Scalar(0, 0, 255), 2, 8, 0);
imshow("Draw object", dst);
|
相似效果

谢谢,如果觉得可以请点个赞!转发请付链接。。。。
原文参考:https://blog.csdn.net/fengyeer20120/article/details/87798638
https://www.cnblogs.com/wangguchangqing/p/4645805.html