为方便查阅,此文是原网站文档翻译,如有侵权,请与本人联系。
基础类别ChSteering规定,任何衍生的转向机构类别(转向机构模板)都提供了一个转向连杆体,可转向悬架可以连接到该转向连杆体上(通常通过悬架的连杆)。
衍生转向机构类型定义了特定类型转向机构的主体、关节、受力元件和拓扑结构,假设所有位置都是相对于机构参考系提供的(衍生的转向机构类型可以自由选择该参考系的位置和方向)。
通过指定机构总成参考系相对于底盘参考系的位置和方向,将转向机构总成连接到车辆底盘上(参见ISO参考系的定义)。
轮式车辆可以具有多个转向机构,每个转向机构与不同的可转向车轴相关联。类似地,单个转向机构可以连接到多个可转向车轴。
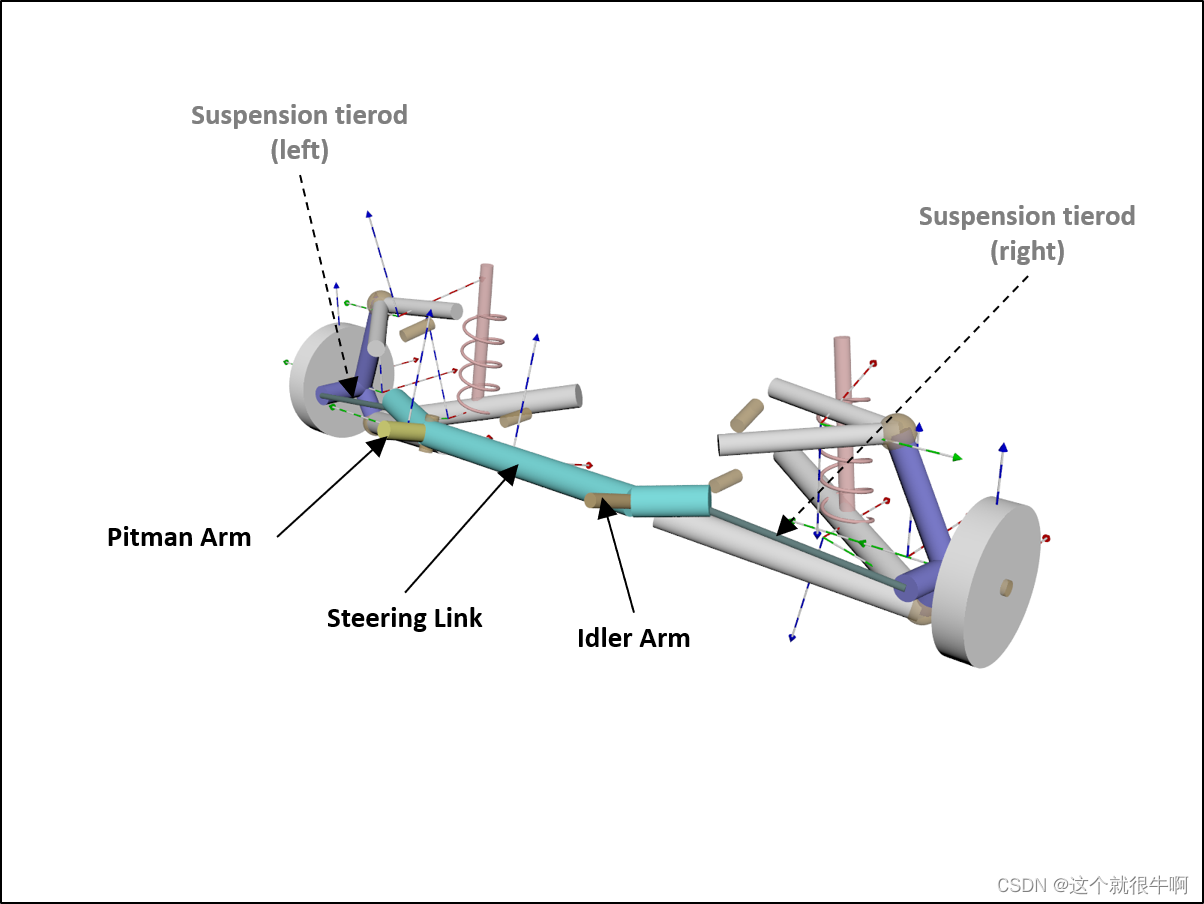
转向垂臂
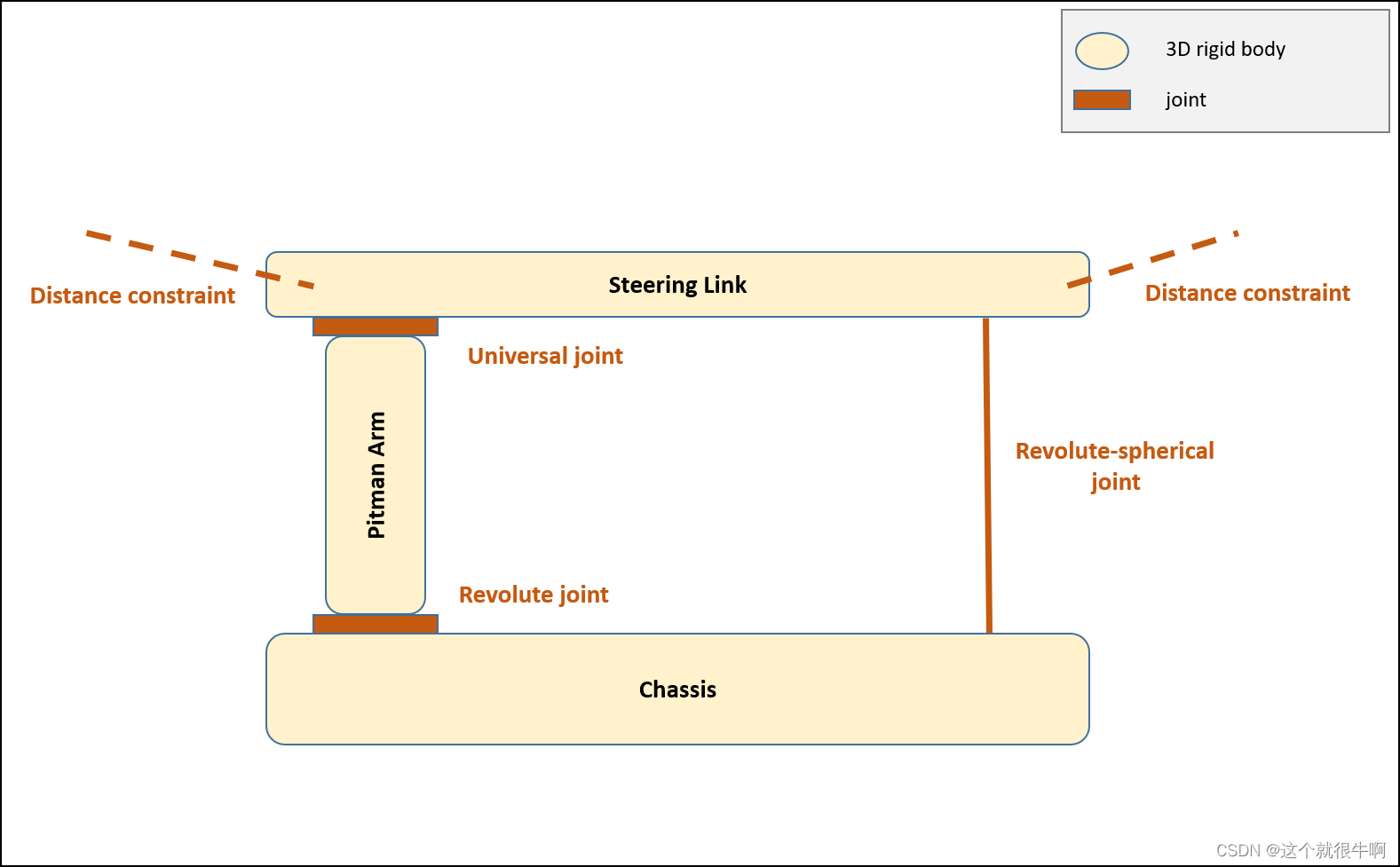
该转向机构是一个四连杆机构,其转向连杆体通过皮特曼臂和惰轮臂连接到底盘,皮特曼臂体通过万向节连接到转向连杆,并通过旋转接头连接到底盘。驾驶员转向输入用于控制旋转接头的角度。在Chrono::Vehicle Pitman臂模板中,惰轮臂使用复合旋转球形接头建模
参考 ChPitmanArm and PitmanArm.
拓扑结构:
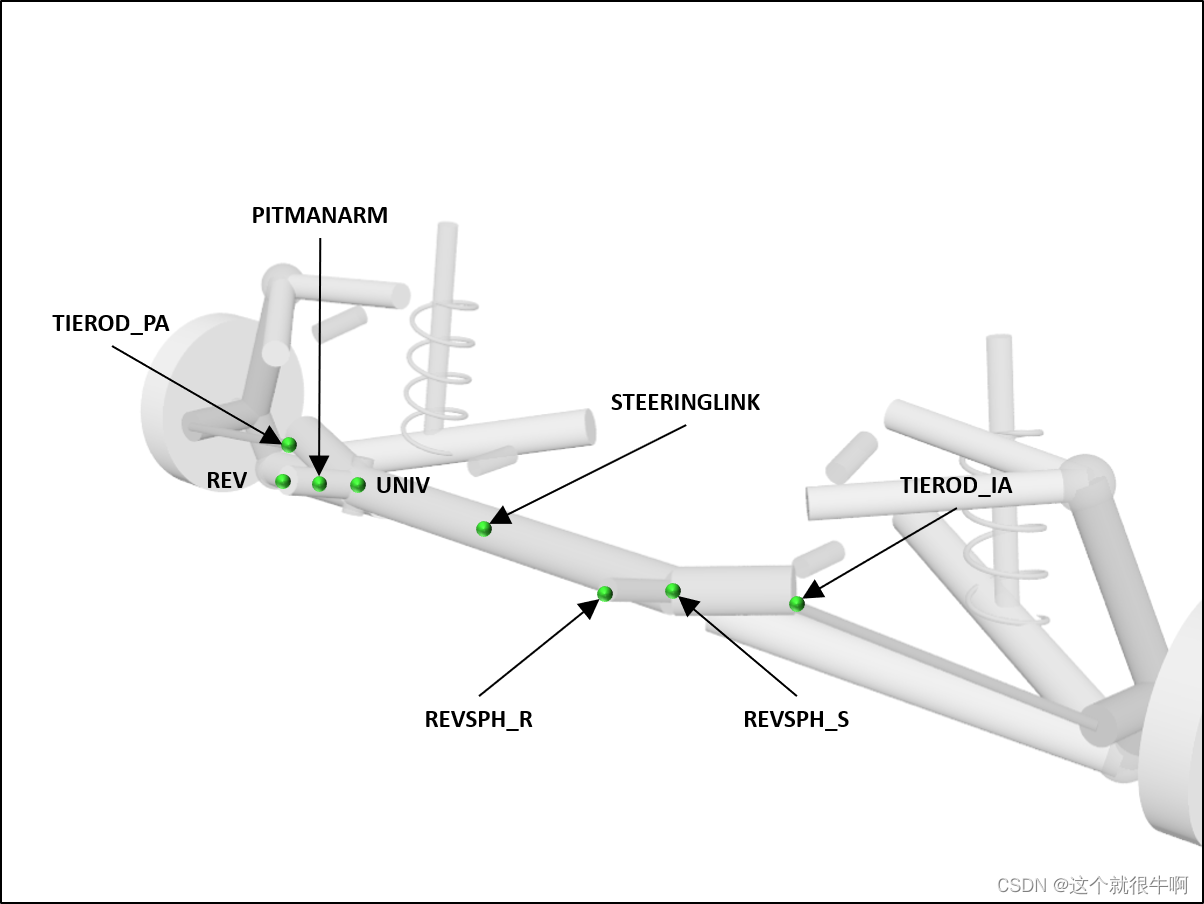
硬点:
具有PitmanArm转向机构规范的示例JSON文件如下:
{
"Name": "HMMWV Pitman Arm Steering",
"Type": "Steering",
"Template": "PitmanArm",
"Vehicle-Frame Inertia": false,
"Steering Link":
{
"Mass": 3.681,
"COM": [0.129, 0, 0],
"Moments of Inertia": [0.252, 0.00233, 0.254],
"Products of Inertia": [0, 0, 0],
"Radius": 0.03
},
"Pitman Arm":
{
"Mass": 1.605,
"COM": [0.064, 0.249, 0],
"Moments of Inertia": [0.00638, 0.00756, 0.00150],
"Products of Inertia": [0, 0, 0],
"Radius": 0.02
},
"Revolute Joint":
{
"Location": [0, 0.249, 0],
"Direction": [0, 0, 1],
"Maximum Angle (deg)": 30
},
"Universal Joint":
{
"Location": [ 0.129, 0.249, 0],
"Direction Arm": [0, 0, 1],
"Direction Link": [1, 0, 0]
},
"Revolute-Spherical Joint":
{
"Location Chassis": [0, -0.325, 0],
"Location Link": [0.129, -0.325, 0],
"Direction": [0, 0, 1]
},
"Tierod Locations":
{
"Pitman Side": [0.195, 0.448, 0.035],
"Idler Side": [0.195, -0.448, 0.035]
}
}
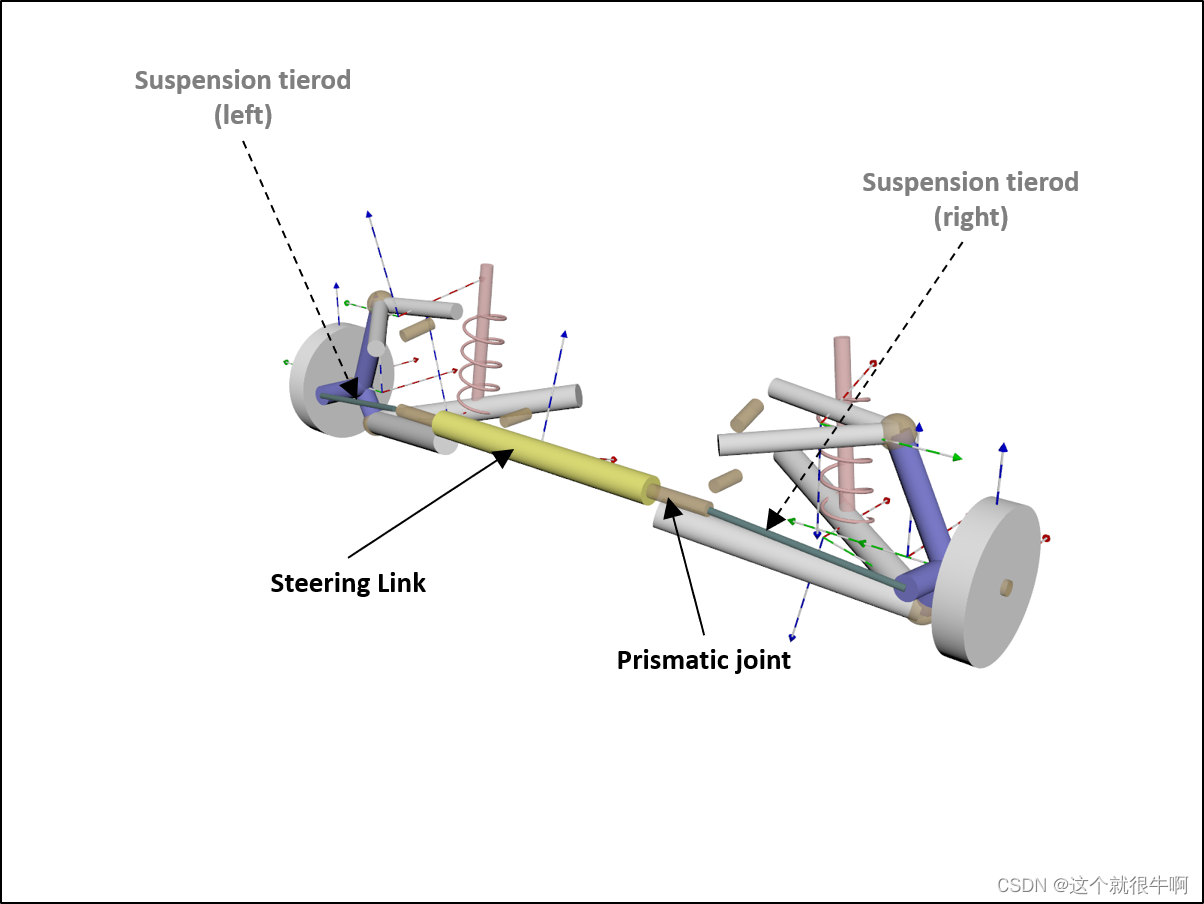
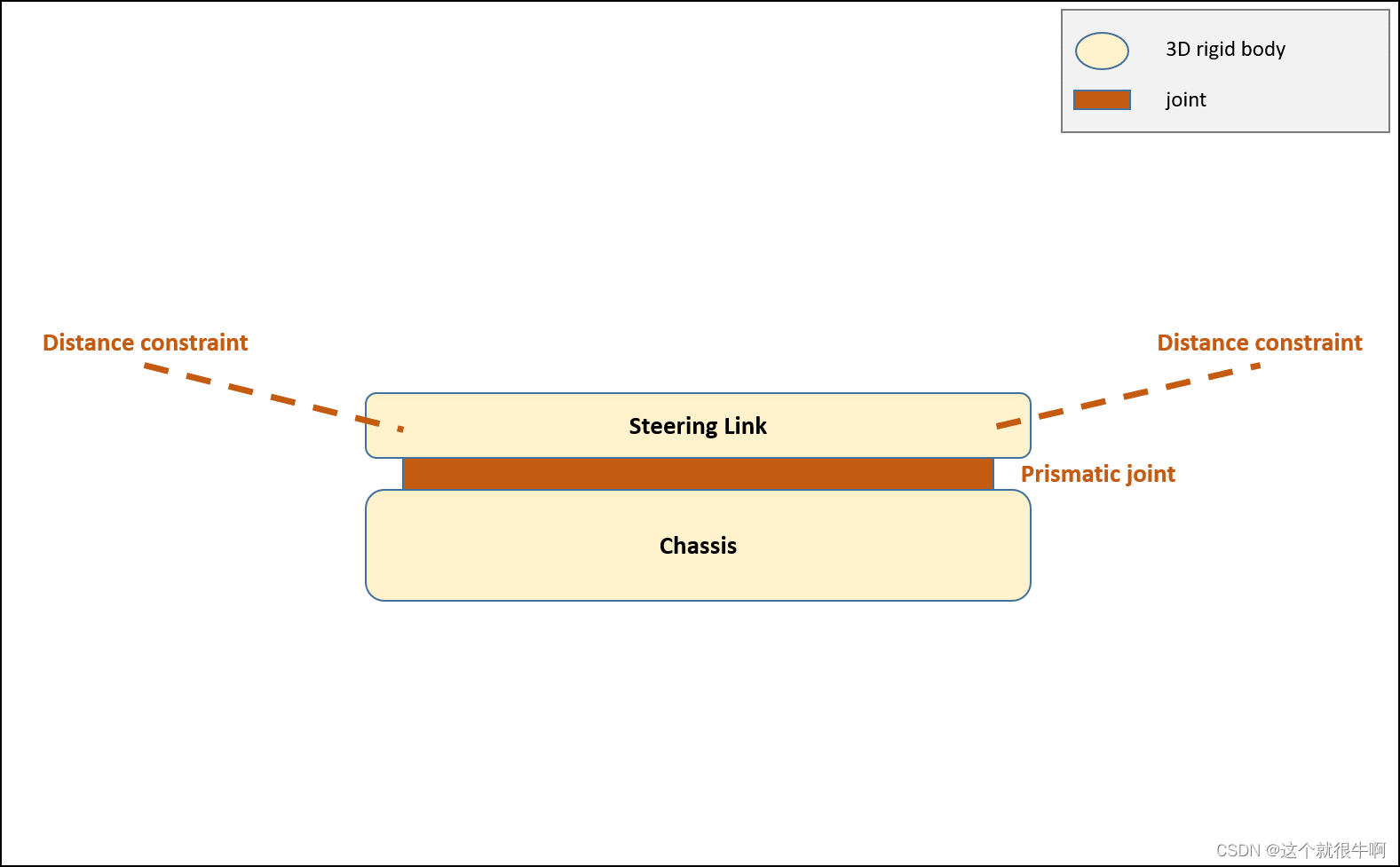
齿条小齿轮
Chrono::Vehicle齿条齿轮转向模板是齿条齿轮转向机构的运动学模型,转向连杆体通过棱柱形接头连接到底盘上。齿条位移计算如下:
d
=
r
(
α
m
a
x
s
)
d = r (\alpha_{max} s)
d=r(αmaxs)
式中:
r
小齿轮半径,
r 小齿轮半径,
r小齿轮半径,\alpha_{max} 小齿轮最大角度,$s \in [-1,1]驾驶转向输入,该位移用于控制转向连杆的平移,
参考ChRackPinion 和RackPinion.
拓扑如下:
硬点:
具有RackPinion转向机构规格的示例JSON文件如下:
{
"Name": "HMMWV Rack-Pinion Steering",
"Type": "Steering",
"Template": "RackPinion",
"Steering Link":
{
"Mass": 9.072,
"COM": 0,
"Inertia": [1, 1, 1],
"Radius": 0.03,
"Length": 0.896
},
"Pinion":
{
"Radius": 0.1,
"Maximum Angle (deg)": 50
}
}
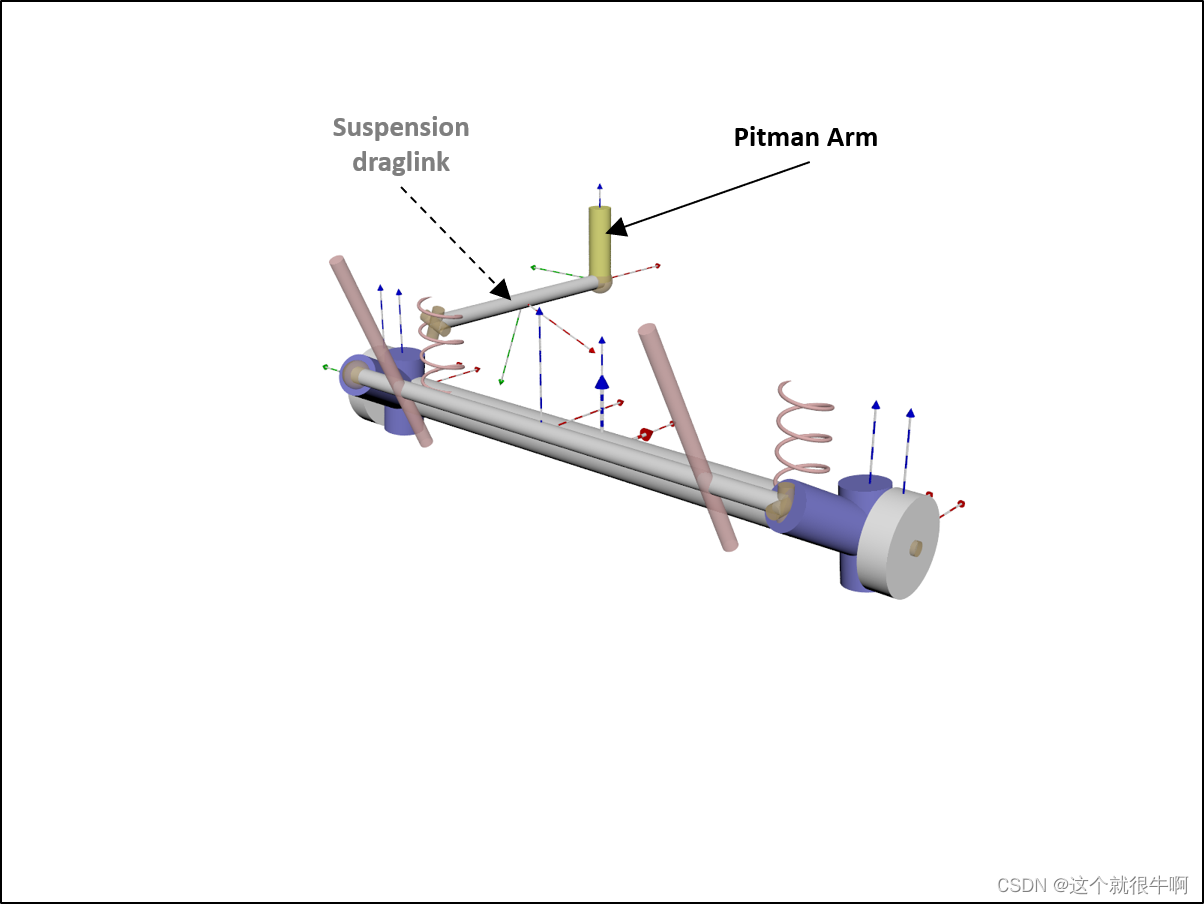
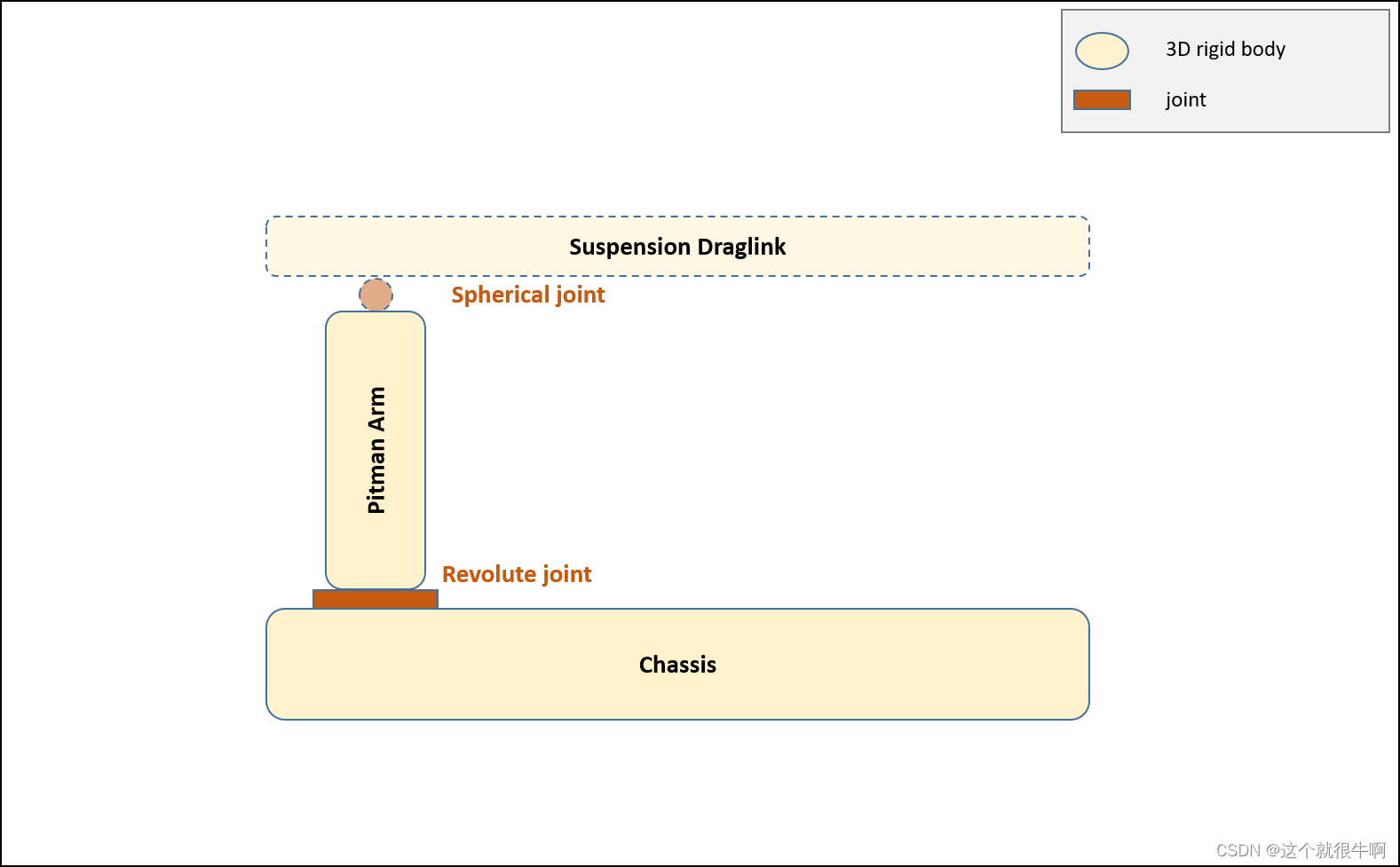
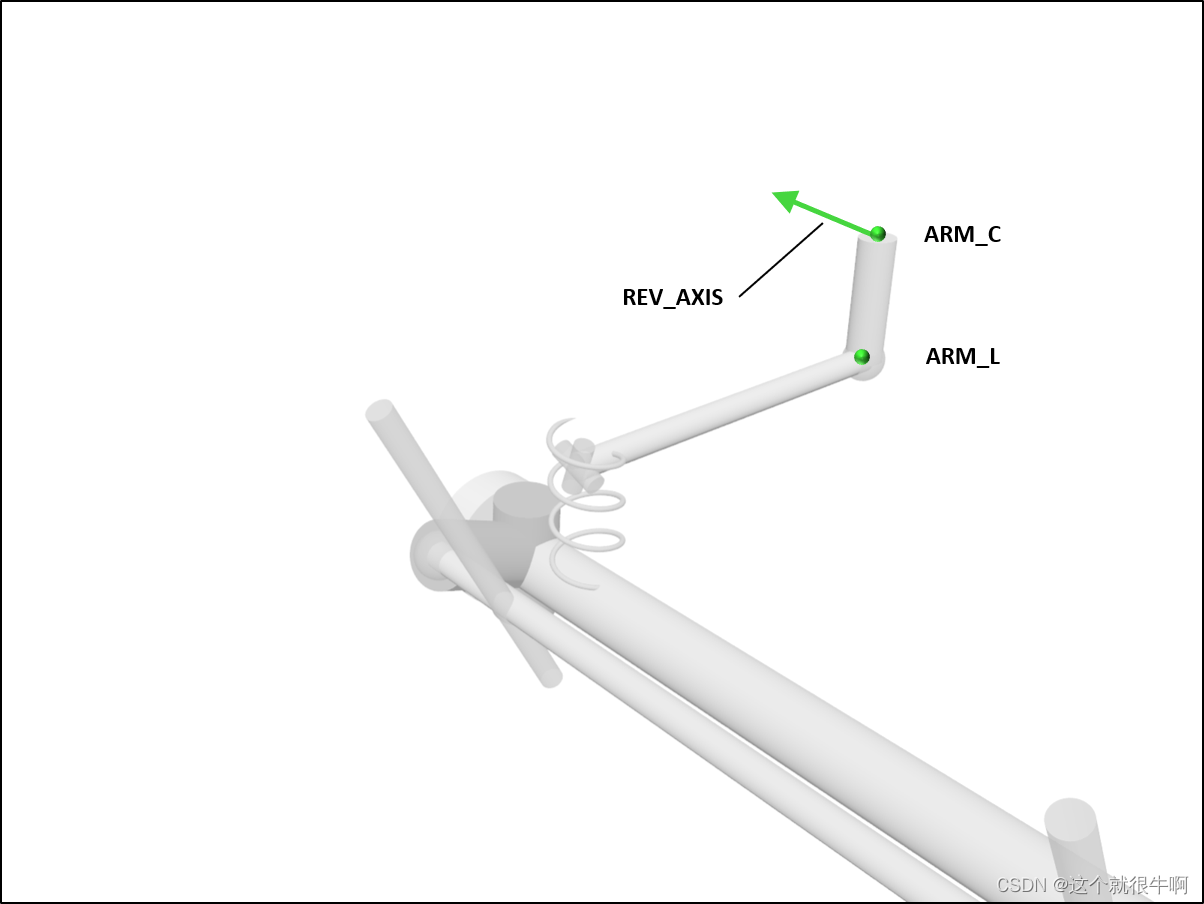
旋转臂
旋转臂转向是一个绕轴旋转的简单杠杆臂。它适用于实心曲拐轴和实心趾杆轴。它经常被用作卡车、农用拖拉机和联合收割机的转向系统
参考ChRotaryArm和RotaryArm.
拓扑:
硬点:
带有RotaryArm转向机构规格的示例JSON文件如下:
{
"Name": "UAZBUS Rotary-Arm Steering",
"Type": "Steering",
"Template": "RotaryArm",
"Pitman Arm":
{
"Mass": 5.0,
"Inertia": [0.00638, 0.00756, 0.00150],
"Inertia Products": [0, 0, 0],
"Radius": 0.03,
"Axis of Rotation": [0, 1, 0], // arm-chassis revolute joint
"Point of Rotation": [0.6, 0.5325, 0.4], // location of chassis connection
"Point to Draglink": [0.6, 0.5325, 0.2], // location of draglink connection
"Maximum Angle (deg)": 12.5
}
}