BetaFlight深入传感设计之十:传感器物理特性方向对齐
- 1. 对齐定义
- 2. 常见对齐方式
- 3. 自定义对齐方式
- 4. 总结
- 5. 参考资料
- 6. 补充:gyro + mag对齐方式
AHRS(Attitude and Heading Reference Systems)算法主要需要考虑:加速度、方向角、磁力计、GPS等传感器物理特性对飞机姿态以及机头指向的计算和错误估算方法。
鉴于电子器件在实际使用时,受安装、干扰和各种因素(PCB layout、机架传感器安装位置、打印件结构等)影响,其传感物理特性的指向方向与机体坐标并非完全一致。因此在算法之初需要对传感器的各个物理特性进行对齐,确保数据和姿态的一致性。
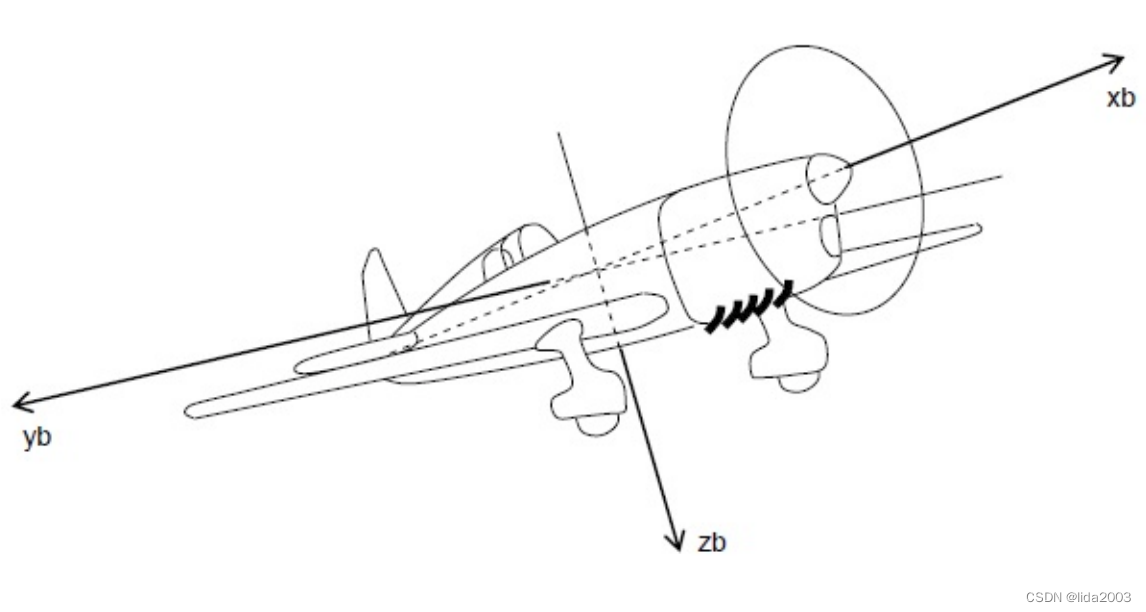
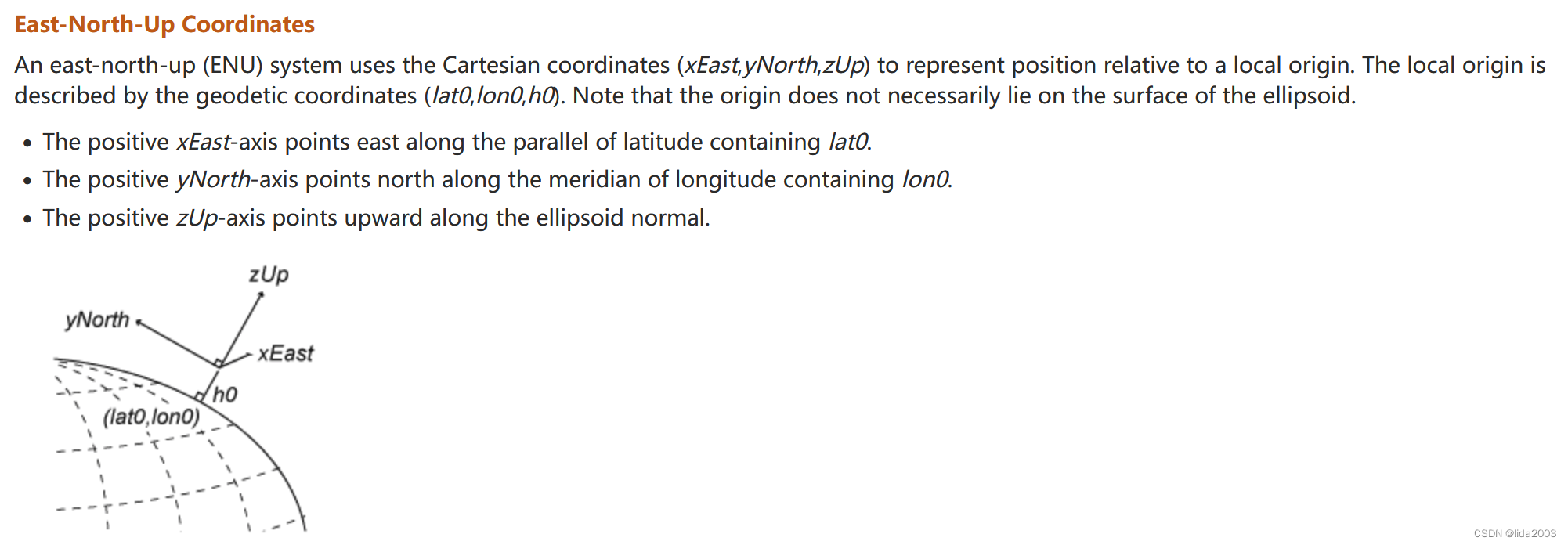
注1:当我们说到BetaFlight固件机体坐标系的时候,请使用xEast-yNorth-zUp(RH)坐标系统,与通常我们所说的机体坐标系有一定的差异,请特别注意!!!
注2:在系统OSD显示以及GPS COG指向时,要注意角度与机体坐标系的yaw进行反向,以便确保+/-号的一致性。
1. 对齐定义
以下是BetaFlight代码给出的对齐方式。
typedef enum {
ALIGN_DEFAULT = 0, // driver-provided alignment
// the order of these 8 values also correlate to corresponding code in ALIGNMENT_TO_BITMASK.
// R, P, Y
CW0_DEG = 1, // 00,00,00
CW90_DEG = 2, // 00,00,01
CW180_DEG = 3, // 00,00,10
CW270_DEG = 4, // 00,00,11
CW0_DEG_FLIP = 5, // 00,10,00 // _FLIP = 2x90 degree PITCH rotations
CW90_DEG_FLIP = 6, // 00,10,01
CW180_DEG_FLIP = 7, // 00,10,10
CW270_DEG_FLIP = 8, // 00,10,11
ALIGN_CUSTOM = 9, // arbitrary sensor angles, e.g. for external sensors
} sensor_align_e;
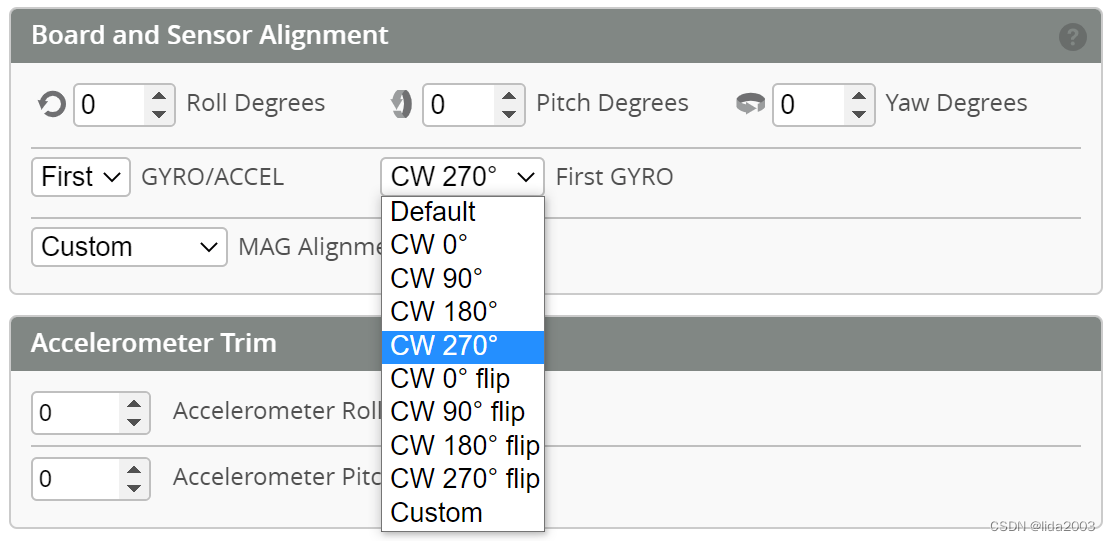
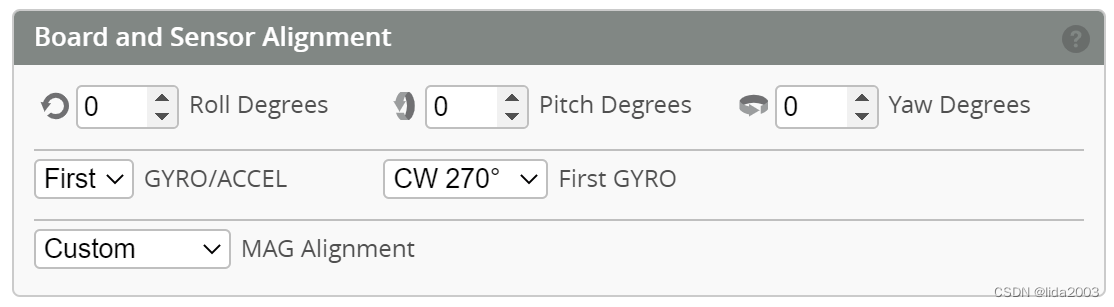
2. 常见对齐方式
- CW0_DEG: 默认芯片坐标系
- CW90_DEG: 芯片坐标系右手系旋转90度
- CW180_DEG: 芯片坐标系右手系旋转180度
- CW270_DEG: 芯片坐标系右手系旋转270度
- CW0_DEG_FLIP: 芯片沿着yNorth指向不变,坐标系翻转(-)
- CW90_DEG_FLIP: 芯片沿着yNorth指向不变,坐标系翻转(-); 然后按照右手系旋转90度
- CW180_DEG_FLIP: 芯片沿着yNorth指向不变,坐标系翻转(-); 然后按照右手系旋转180度
- CW270_DEG_FLIP: 芯片沿着yNorth指向不变,坐标系翻转(-); 然后按照右手系旋转270度
注:FLIP的意思可以认为,保持yNorth不变,进行芯片翻转。
void alignSensorViaRotation(float *dest, uint8_t rotation)
{
const float x = dest[X];
const float y = dest[Y];
const float z = dest[Z];
switch (rotation) {
default:
case CW0_DEG:
dest[X] = x;
dest[Y] = y;
dest[Z] = z;
break;
case CW90_DEG:
dest[X] = y;
dest[Y] = -x;
dest[Z] = z;
break;
case CW180_DEG:
dest[X] = -x;
dest[Y] = -y;
dest[Z] = z;
break;
case CW270_DEG:
dest[X] = -y;
dest[Y] = x;
dest[Z] = z;
break;
case CW0_DEG_FLIP:
dest[X] = -x;
dest[Y] = y;
dest[Z] = -z;
break;
case CW90_DEG_FLIP:
dest[X] = y;
dest[Y] = x;
dest[Z] = -z;
break;
case CW180_DEG_FLIP:
dest[X] = x;
dest[Y] = -y;
dest[Z] = -z;
break;
case CW270_DEG_FLIP:
dest[X] = -y;
dest[Y] = -x;
dest[Z] = -z;
break;
}
if (!standardBoardAlignment) {
alignBoard(dest);
}
}
3. 自定义对齐方式
这里尤其要注意这个自定义对齐方式,有一些GPS模块由于芯片在PCB上是45度安装的,当需要绑在机架上的时候,往往会出现需要旋转45度或者135度的情况。此时,无法使用常见的对齐方式,需要采用自定义的方式。
请查阅芯片手册,并确认物理芯片上的一个小点,依据上述两个信息来明确芯片的物理特性指向,并将芯片坐标系旋转到的机体xEast-yNorth-zUp(RH)坐标系统。
void buildRotationMatrixFromAlignment(const sensorAlignment_t* sensorAlignment, fp_rotationMatrix_t* rm)
{
fp_angles_t rotationAngles;
rotationAngles.angles.roll = DECIDEGREES_TO_RADIANS(sensorAlignment->roll);
rotationAngles.angles.pitch = DECIDEGREES_TO_RADIANS(sensorAlignment->pitch);
rotationAngles.angles.yaw = DECIDEGREES_TO_RADIANS(sensorAlignment->yaw);
buildRotationMatrix(&rotationAngles, rm);
}
void buildRotationMatrix(fp_angles_t *delta, fp_rotationMatrix_t *rotation)
{
float cosx, sinx, cosy, siny, cosz, sinz;
float coszcosx, sinzcosx, coszsinx, sinzsinx;
cosx = cos_approx(delta->angles.roll);
sinx = sin_approx(delta->angles.roll);
cosy = cos_approx(delta->angles.pitch);
siny = sin_approx(delta->angles.pitch);
cosz = cos_approx(delta->angles.yaw);
sinz = sin_approx(delta->angles.yaw);
coszcosx = cosz * cosx;
sinzcosx = sinz * cosx;
coszsinx = sinx * cosz;
sinzsinx = sinx * sinz;
rotation->m[0][X] = cosz * cosy;
rotation->m[0][Y] = -cosy * sinz;
rotation->m[0][Z] = siny;
rotation->m[1][X] = sinzcosx + (coszsinx * siny);
rotation->m[1][Y] = coszcosx - (sinzsinx * siny);
rotation->m[1][Z] = -sinx * cosy;
rotation->m[2][X] = (sinzsinx) - (coszcosx * siny);
rotation->m[2][Y] = (coszsinx) + (sinzcosx * siny);
rotation->m[2][Z] = cosy * cosx;
}
4. 总结
关于传感器物理特性方向对齐相当于给出了上下左右前后的方向,确保飞控系统能够正确的响应传感数据。
以下一些重要信息大家可以查阅之前的资料:
- 旋转矩阵:【7】
- 坐标系统:【9】
- 物理特性:【2】、【3】、【4】、【5】
5. 参考资料
【1】BetaFlight深入传感设计:传感模块设计框架
【2】BetaFlight深入传感设计之一:Baro传感模块
【3】BetaFlight深入传感设计之二:Mag传感模块
【4】BetaFlight深入传感设计之三:IMU传感模块
【5】BetaFlight深入传感设计之四:GPS传感模块
【6】BetaFlight深入传感设计之五:MahonyAHRS & 方向余弦矩阵理论
【7】BetaFlight深入传感设计之六:四元数计算方法
【8】BetaFlight深入传感设计之七:GPS&Baro高度数据融合
【9】BetaFlight深入传感设计之八:坐标系
【10】BetaFlight深入传感设计之九:传感坐标系/机体坐标系/导航坐标系/经纬度坐标系
6. 补充:gyro + mag对齐方式
align_mag = CUSTOM
Allowed values: DEFAULT, CW0, CW90, CW180, CW270, CW0FLIP, CW90FLIP, CW180FLIP, CW270FLIP, CUSTOM
Default value: DEFAULT
mag_align_roll = 0
Allowed range: -3600 - 3600
mag_align_pitch = 1800
Allowed range: -3600 - 3600
Default value: 0
mag_align_yaw = 1350
Allowed range: -3600 - 3600
Default value: 0
gyro_1_sensor_align = CW270
Allowed values: DEFAULT, CW0, CW90, CW180, CW270, CW0FLIP, CW90FLIP, CW180FLIP, CW270FLIP, CUSTOM
Default value: CW0FLIP
gyro_1_align_roll = 0
Allowed range: -3600 - 3600
gyro_1_align_pitch = 0
Allowed range: -3600 - 3600
Default value: 1800
gyro_1_align_yaw = 2700
Allowed range: -3600 - 3600
Default value: 0
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)