在本教程中,我将通过实施Advantage Actor-Critic(演员-评论家,A2C)代理来解决经典的CartPole-v0环境,通过深度强化学习(DRL)展示即将推出的TensorFlow2.0特性。虽然我们的目标是展示TensorFlow2.0,但我将尽最大努力让DRL的讲解更加平易近人,包括对该领域的简要概述。
事实上,由于2.0版本的焦点是让开发人员的生活变得更轻松,所以我认为现在是使用TensorFlow进入DRL的好时机,本文用到的例子的源代码不到150行!代码可以在这里或者这里获取。
建立
由于TensorFlow2.0仍处于试验阶段,我建议将其安装在独立的虚拟环境中。我个人比较喜欢Anaconda,所以我将用它来演示安装过程:
> conda create -n tf2 python=3.6
> source activate tf2
> pip install tf-nightly-2.0-preview # tf-nightly-gpu-2.0-preview for GPU version
让我们快速验证一切是否按能够正常工作:
>>> import tensorflow as tf
>>> print(tf.__version__)
1.13.0-dev20190117
>>> print(tf.executing_eagerly())
True
不要担心1.13.x版本,这只是意味着它是早期预览。这里要注意的是我们默认处于eager模式!
>>> print(tf.reduce_sum([1, 2, 3, 4, 5]))
tf.Tensor(15, shape=(), dtype=int32)
如果你还不熟悉eager模式,那么实质上意味着计算是在运行时被执行的,而不是通过预编译的图(曲线图)来执行。你可以在TensorFlow文档中找到一个很好的概述。
深度强化学习
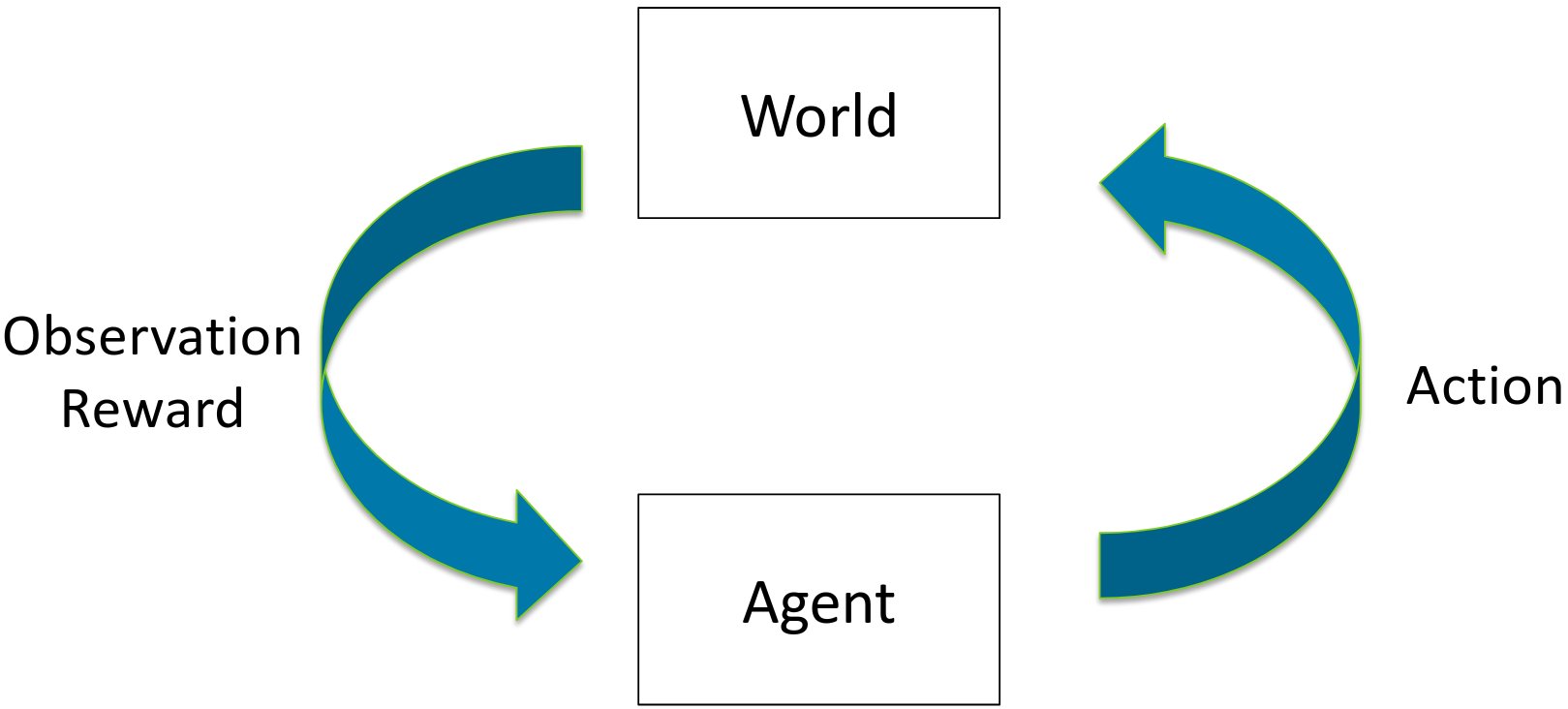
一般而言,强化学习是解决连续决策问题的高级框架。RL通过基于某些agent进行导航观察环境,并且获得奖励。大多数RL算法通过最大化代理在一轮游戏期间收集的奖励总和来工作。
基于RL的算法的输出通常是policy(策略)-将状态映射到函数有效的策略中,有效的策略可以像硬编码的无操作动作一样简单。在某些状态下,随机策略表示为行动的条件概率分布。
演员,评论家方法(Actor-Critic Methods)
RL算法通常基于它们优化的目标函数进行分组。Value-based诸如DQN之类的方法通过减少预期的状态-动作值的误差来工作。
策略梯度(Policy Gradients)方法通过调整其参数直接优化策略本身,通常通过梯度下降完成的。完全计算梯度通常是难以处理的,因此通常要通过蒙特卡罗方法估算它们。
最流行的方法是两者的混合:actor-critic方法,其中代理策略通过策略梯度进行优化,而基于值的方法用作预期值估计的引导。
深度演员-批评方法
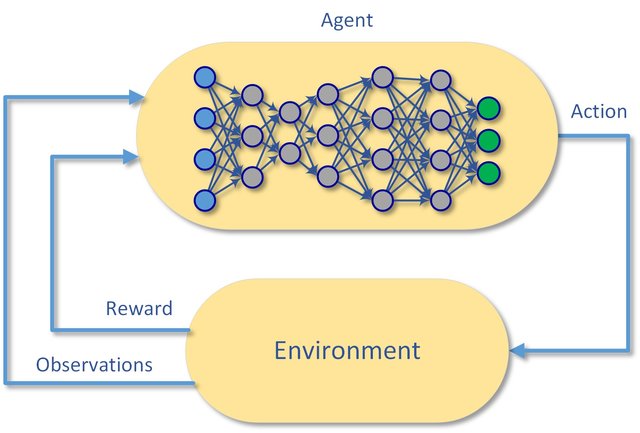
虽然很多基础的RL理论是在表格案例中开发的,但现代RL几乎完全是用函数逼近器完成的,例如人工神经网络。具体而言,如果策略和值函数用深度神经网络近似,则RL算法被认为是“深度”。
异步优势演员-评论家(actor-critical)
多年来,为了提高学习过程的样本效率和稳定性,技术发明者已经进行了一些改进。
首先,梯度加权回报:折现的未来奖励,这在一定程度上缓解了信用分配问题,并以无限的时间步长解决了理论问题。
其次,使用优势函数代替原始回报。优势在收益与某些基线之间的差异之间形成,并且可以被视为衡量给定值与某些平均值相比有多好的指标。
第三,在目标函数中使用额外的熵最大化项以确保代理充分探索各种策略。本质上,熵以均匀分布最大化来测量概率分布的随机性。
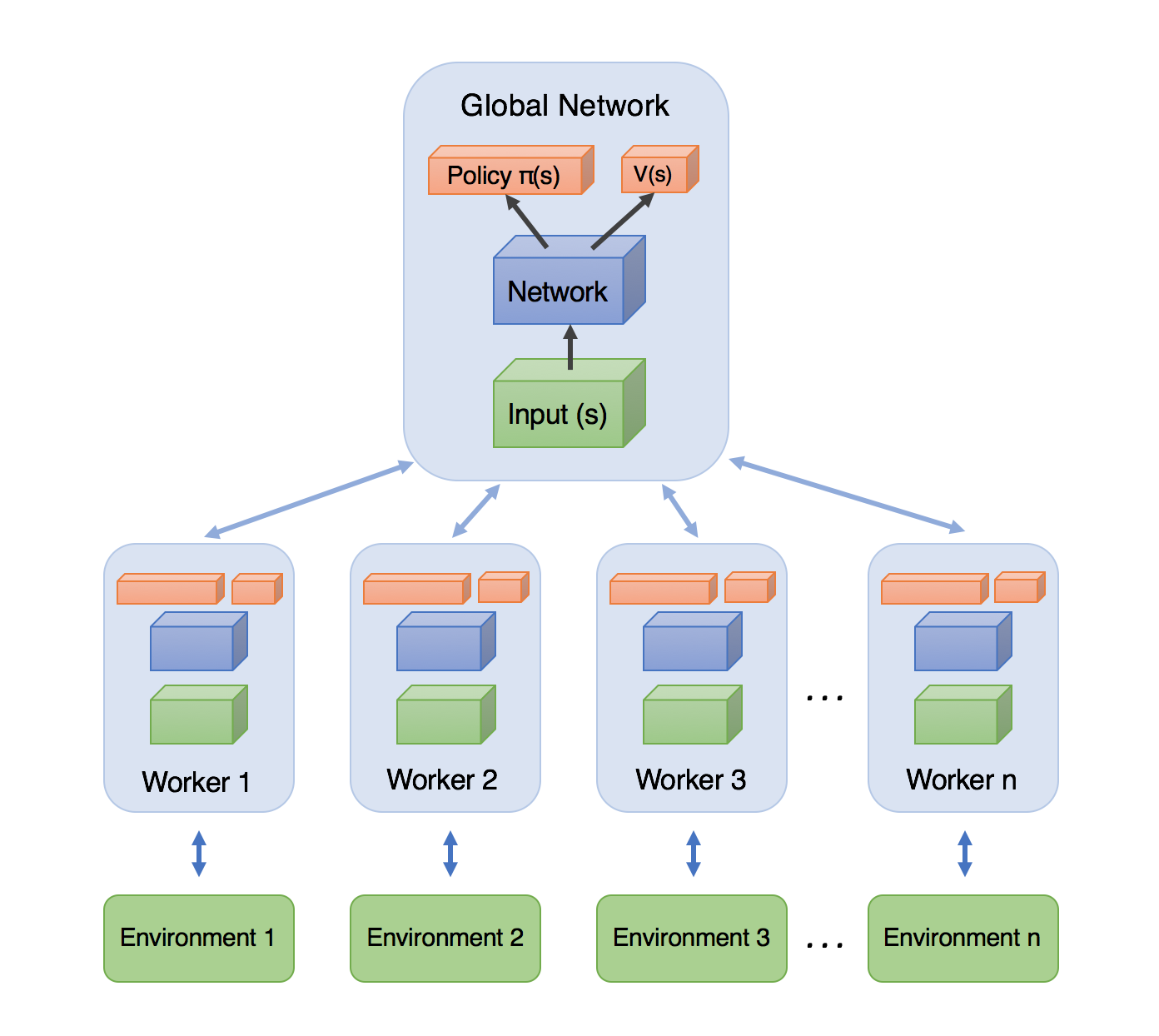
最后,并行使用多个工人加速样品采集,同时在训练期间帮助它们去相关。
将所有这些变化与深度神经网络相结合,我们得出了两种最流行的现代算法:异步优势演员评论家(actor-critical)算法,简称A3C或者A2C。两者之间的区别在于技术性而非理论性:顾名思义,它归结为并行工人如何估计其梯度并将其传播到模型中。
有了这个,我将结束我们的DRL方法之旅,因为博客文章的重点更多是关于TensorFlow2.0的功能。如果你仍然不了解该主题,请不要担心,代码示例应该更清楚。如果你想了解更多,那么一个好的资源就可以开始在Deep RL中进行Spinning Up了。
使用TensorFlow 2.0的优势演员-评论家
让我们看看实现现代DRL算法的基础是什么:演员评论家代理(actor-critic agent)。如前一节所述,为简单起见,我们不会实现并行工作程序,尽管大多数代码都会支持它,感兴趣的读者可以将其用作锻炼机会。
作为测试平台,我们将使用CartPole-v0环境。虽然它有点简单,但它仍然是一个很好的选择开始。在实现RL算法时,我总是依赖它作为一种健全性检查。
通过Keras Model API实现的策略和价值
首先,让我们在单个模型类下创建策略和价值估计NN:
import numpy as np
import tensorflow as tf
import tensorflow.keras.layers as kl
class ProbabilityDistribution(tf.keras.Model):
def call(self, logits):
# sample a random categorical action from given logits
return tf.squeeze(tf.random.categorical(logits, 1), axis=-1)
class Model(tf.keras.Model):
def __init__(self, num_actions):
super().__init__('mlp_policy')
# no tf.get_variable(), just simple Keras API
self.hidden1 = kl.Dense(128, activation='relu')
self.hidden2 = kl.Dense(128, activation='relu')
self.value = kl.Dense(1, name='value')
# logits are unnormalized log probabilities
self.logits = kl.Dense(num_actions, name='policy_logits')
self.dist = ProbabilityDistribution()
def call(self, inputs):
# inputs is a numpy array, convert to Tensor
x = tf.convert_to_tensor(inputs, dtype=tf.float32)
# separate hidden layers from the same input tensor
hidden_logs = self.hidden1(x)
hidden_vals = self.hidden2(x)
return self.logits(hidden_logs), self.value(hidden_vals)
def action_value(self, obs):
# executes call() under the hood
logits, value = self.predict(obs)
action = self.dist.predict(logits)
# a simpler option, will become clear later why we don't use it
# action = tf.random.categorical(logits, 1)
return np.squeeze(action, axis=-1), np.squeeze(value, axis=-1)
验证我们验证模型是否按预期工作:
import gym
env = gym.make('CartPole-v0')
model = Model(num_actions=env.action_space.n)
obs = env.reset()
# no feed_dict or tf.Session() needed at all
action, value = model.action_value(obs[None, :])
print(action, value) # [1] [-0.00145713]
这里要注意的事项:
- 模型层和执行路径是分开定义的;
- 没有“输入”图层,模型将接受原始numpy数组;
- 可以通过函数API在一个模型中定义两个计算路径;
- 模型可以包含一些辅助方法,例如动作采样;
- 在eager的模式下,一切都可以从原始的numpy数组中运行;
随机代理
现在我们可以继续学习一些有趣的东西A2CAgent类。首先,让我们添加一个贯穿整集的test方法并返回奖励总和。
class A2CAgent:
def __init__(self, model):
self.model = model
def test(self, env, render=True):
obs, done, ep_reward = env.reset(), False, 0
while not done:
action, _ = self.model.action_value(obs[None, :])
obs, reward, done, _ = env.step(action)
ep_reward += reward
if render:
env.render()
return ep_reward
让我们看看我们的模型在随机初始化权重下得分多少:
agent = A2CAgent(model)
rewards_sum = agent.test(env)
print("%d out of 200" % rewards_sum) # 18 out of 200
离最佳转台还有很远,接下来是训练部分!
损失/目标函数
正如我在DRL概述部分所描述的那样,代理通过基于某些损失(目标)函数的梯度下降来改进其策略。在演员评论家中,我们训练了三个目标:用优势加权梯度加上熵最大化来改进策略,并最小化价值估计误差。
import tensorflow.keras.losses as kls
import tensorflow.keras.optimizers as ko
class A2CAgent:
def __init__(self, model):
# hyperparameters for loss terms
self.params = {'value': 0.5, 'entropy': 0.0001}
self.model = model
self.model.compile(
optimizer=ko.RMSprop(lr=0.0007),
# define separate losses for policy logits and value estimate
loss=[self._logits_loss, self._value_loss]
)
def test(self, env, render=True):
# unchanged from previous section
...
def _value_loss(self, returns, value):
# value loss is typically MSE between value estimates and returns
return self.params['value']*kls.mean_squared_error(returns, value)
def _logits_loss(self, acts_and_advs, logits):
# a trick to input actions and advantages through same API
actions, advantages = tf.split(acts_and_advs, 2, axis=-1)
# polymorphic CE loss function that supports sparse and weighted options
# from_logits argument ensures transformation into normalized probabilities
cross_entropy = kls.CategoricalCrossentropy(from_logits=True)
# policy loss is defined by policy gradients, weighted by advantages
# note: we only calculate the loss on the actions we've actually taken
# thus under the hood a sparse version of CE loss will be executed
actions = tf.cast(actions, tf.int32)
policy_loss = cross_entropy(actions, logits, sample_weight=advantages)
# entropy loss can be calculated via CE over itself
entropy_loss = cross_entropy(logits, logits)
# here signs are flipped because optimizer minimizes
return policy_loss - self.params['entropy']*entropy_loss
我们完成了目标函数!请注意代码的紧凑程度:注释行几乎比代码本身多。
代理训练循环
最后,还有训练回路本身,它相对较长,但相当简单:收集样本,计算回报和优势,并在其上训练模型。
class A2CAgent:
def __init__(self, model):
# hyperparameters for loss terms
self.params = {'value': 0.5, 'entropy': 0.0001, 'gamma': 0.99}
# unchanged from previous section
...
def train(self, env, batch_sz=32, updates=1000):
# storage helpers for a single batch of data
actions = np.empty((batch_sz,), dtype=np.int32)
rewards, dones, values = np.empty((3, batch_sz))
observations = np.empty((batch_sz,) + env.observation_space.shape)
# training loop: collect samples, send to optimizer, repeat updates times
ep_rews = [0.0]
next_obs = env.reset()
for update in range(updates):
for step in range(batch_sz):
observations[step] = next_obs.copy()
actions[step], values[step] = self.model.action_value(next_obs[None, :])
next_obs, rewards[step], dones[step], _ = env.step(actions[step])
ep_rews[-1] += rewards[step]
if dones[step]:
ep_rews.append(0.0)
next_obs = env.reset()
_, next_value = self.model.action_value(next_obs[None, :])
returns, advs = self._returns_advantages(rewards, dones, values, next_value)
# a trick to input actions and advantages through same API
acts_and_advs = np.concatenate([actions[:, None], advs[:, None]], axis=-1)
# performs a full training step on the collected batch
# note: no need to mess around with gradients, Keras API handles it
losses = self.model.train_on_batch(observations, [acts_and_advs, returns])
return ep_rews
def _returns_advantages(self, rewards, dones, values, next_value):
# next_value is the bootstrap value estimate of a future state (the critic)
returns = np.append(np.zeros_like(rewards), next_value, axis=-1)
# returns are calculated as discounted sum of future rewards
for t in reversed(range(rewards.shape[0])):
returns[t] = rewards[t] + self.params['gamma'] * returns[t+1] * (1-dones[t])
returns = returns[:-1]
# advantages are returns - baseline, value estimates in our case
advantages = returns - values
return returns, advantages
def test(self, env, render=True):
# unchanged from previous section
...
def _value_loss(self, returns, value):
# unchanged from previous section
...
def _logits_loss(self, acts_and_advs, logits):
# unchanged from previous section
...
训练和结果
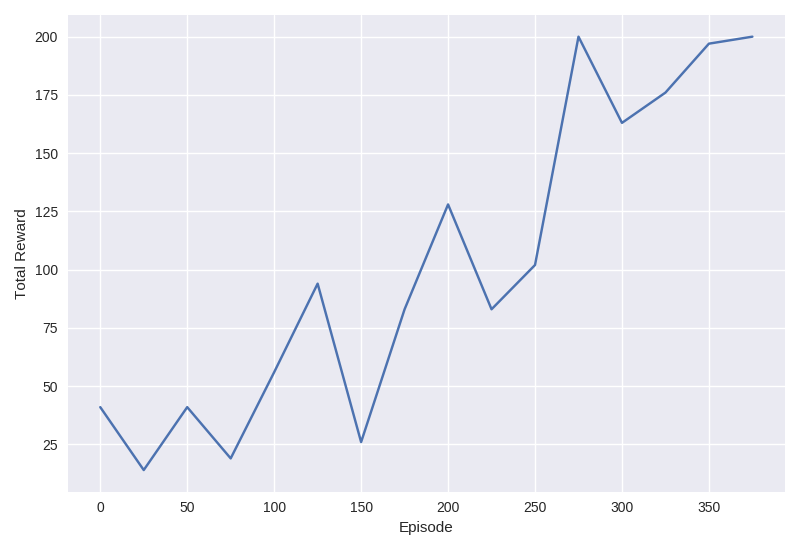
我们现在已经准备好在CartPole-v0上训练我们的单工A2C代理了!训练过程不应超过几分钟,训练完成后,你应该看到代理成功达到200分中的目标。
rewards_history = agent.train(env)
print("Finished training, testing...")
print("%d out of 200" % agent.test(env)) # 200 out of 200

在源代码中,我包含了一些额外的帮助程序,可以打印出运行的奖励和损失,以及rewards_history的基本绘图仪。
静态计算图
有了所有这种渴望模式的成功的喜悦,你可能想知道静态图形执行是否可以。当然!此外,我们还需要多一行代码来启用它!
with tf.Graph().as_default():
print(tf.executing_eagerly()) # False
model = Model(num_actions=env.action_space.n)
agent = A2CAgent(model)
rewards_history = agent.train(env)
print("Finished training, testing...")
print("%d out of 200" % agent.test(env)) # 200 out of 200
有一点需要注意,在静态图形执行期间,我们不能只有Tensors,这就是为什么我们在模型定义期间需要使用CategoricalDistribution的技巧。事实上,当我在寻找一种在静态模式下执行的方法时,我发现了一个关于通过Keras API构建的模型的一个有趣的低级细节。
还有一件事…
还记得我说过TensorFlow默认是运行在eager模式下吧,甚至用代码片段证明它吗?好吧,我错了。
如果你使用Keras API来构建和管理模型,那么它将尝试将它们编译为静态图形。所以你最终得到的是静态计算图的性能,具有渴望执行的灵活性。
你可以通过model.run_eagerly标志检查模型的状态,你也可以通过设置此标志来强制执行eager模式变成True,尽管大多数情况下你可能不需要这样做。但如果Keras检测到没有办法绕过eager模式,它将自动退出。
为了说明它确实是作为静态图运行,这里是一个简单的基准测试:
# create a 100000 samples batch
env = gym.make('CartPole-v0')
obs = np.repeat(env.reset()[None, :], 100000, axis=0)
Eager基准
%%time
model = Model(env.action_space.n)
model.run_eagerly = True
print("Eager Execution: ", tf.executing_eagerly())
print("Eager Keras Model:", model.run_eagerly)
_ = model(obs)
######## Results #######
Eager Execution: True
Eager Keras Model: True
CPU times: user 639 ms, sys: 736 ms, total: 1.38 s
静态基准
%%time
with tf.Graph().as_default():
model = Model(env.action_space.n)
print("Eager Execution: ", tf.executing_eagerly())
print("Eager Keras Model:", model.run_eagerly)
_ = model.predict(obs)
######## Results #######
Eager Execution: False
Eager Keras Model: False
CPU times: user 793 ms, sys: 79.7 ms, total: 873 ms
默认基准
%%time
model = Model(env.action_space.n)
print("Eager Execution: ", tf.executing_eagerly())
print("Eager Keras Model:", model.run_eagerly)
_ = model.predict(obs)
######## Results #######
Eager Execution: True
Eager Keras Model: False
CPU times: user 994 ms, sys: 23.1 ms, total: 1.02 s
正如你所看到的,eager模式是静态模式的背后,默认情况下,我们的模型确实是静态执行的。
结论
希望本文能够帮助你理解DRL和TensorFlow2.0。请注意,TensorFlow2.0仍然只是预览版本,甚至不是候选版本,一切都可能发生变化。如果TensorFlow有什么东西你特别不喜欢,让它的开发者知道!
人们可能会有一个挥之不去的问题:TensorFlow比PyTorch好吗?也许,也许不是。它们两个都是伟大的库,所以很难说这样谁好,谁不好。如果你熟悉PyTorch,你可能已经注意到TensorFlow 2.0不仅赶上了它,而且还避免了一些PyTorch API的缺陷。
在任何一种情况下,对于开发者来说,这场竞争都已经为双方带来了积极的结果,我很期待看到未来的框架将会变成什么样。
本文由阿里云云栖社区组织翻译。
文章原标题《Deep Reinforcement Learning with TensorFlow 2.0》
译者:乌拉乌拉,审校:袁虎。
文章为简译,更为详细的内容,请查看原文