1、bootloader到kernel启动总逻辑流程图
ARM架构中,EL0/EL1是必须实现,EL2/EL3是选配,ELx跟层级对应关系:
EL0 -- app
EL1 -- Linux kernel 、lk
EL2 -- hypervisor(虚拟化)
EL3 -- ARM trust firmware 、pre-loader
若平台未实现EL3(atf),pre-loader直接加载lk:
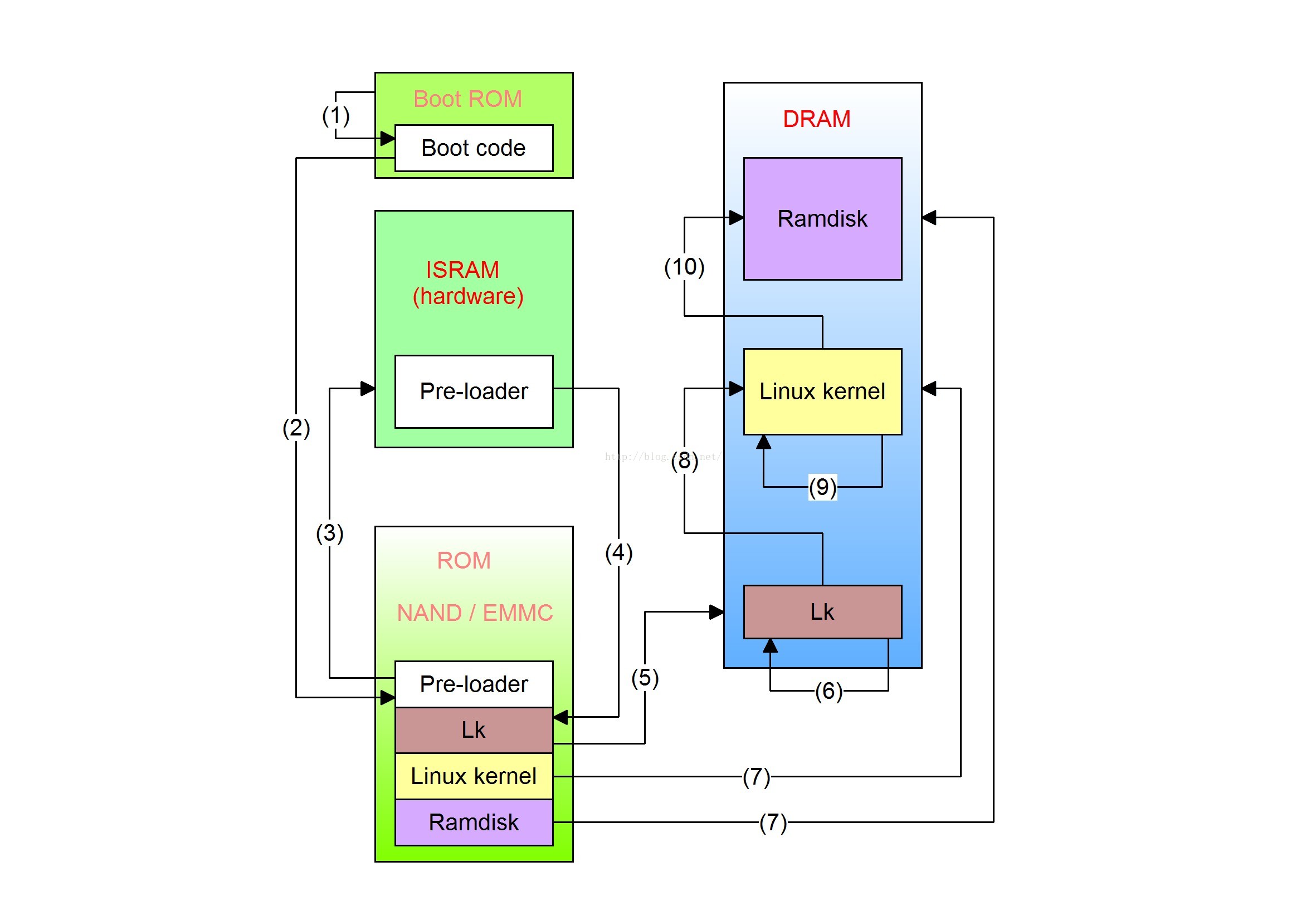
![image]()
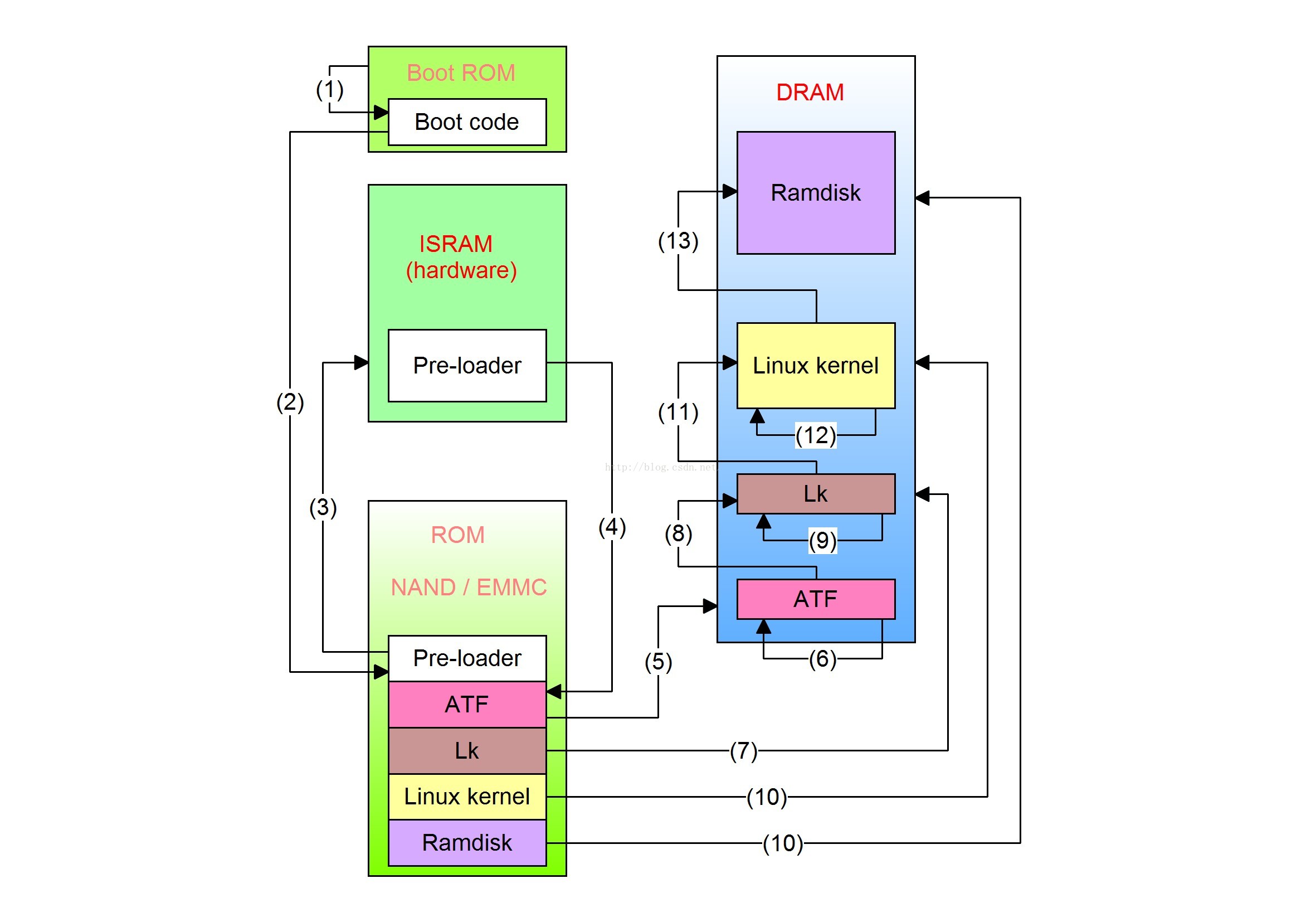
若平台实现EL3,则需要先加载完ATF再由ATF去加载lk:
bootloader 启动分两个阶段,一个是pre-loader加载lk(u-boot)阶段,另一个是lk加载kernel阶段。下面跟着流程图简述第一个阶段的加载流程。
1-3:设备上电起来后,跳转到Boot ROM(不是flash)中的boot code中执行把pre-loader加载起到ISRAM, 因为当前DRAM(RAM分SRAM跟DRAM,简单来说SRAM就是cache,DRAM就是普通内存)还没有准备好,所以要先把pre-loader load到芯片内部的ISRAM(Internal SRAM)中。
4-6:pre-loader初始化好DRAM后就将lk从flash(nand/emmc)中加载到DRAM中运行;
7-8:解压bootimage成ramdisk跟kernel并载入DRAM中,初始化dtb;
9-11:lk跳转到kernl初始化, kernel初始化完成后fork出init进程, 然后拉起ramdisk中的init程序,进入用户空间初始化,init进程fork出zygote进程..直到整个Android启动完成.
2、从pre-loader到lk(mt6580为例)
Pre-loader主要干的事情就是初始化某些硬件,比如: UART,GPIO,DRAM,TIMER,RTC,PMIC 等等,建立起最基本的运行环境,最重要的就是初始化DRAM.
时序图:

点击查看大图
源码流程如下:
./bootloader/preloader/platform/mt6580/src/init/init.s
.section .text.start
...
.globl _start
...
/* set the cpu to SVC32 mode */
MRS r0,cpsr
BIC r0,r0,#0x1f
ORR r0,r0,#0xd3
MSR cpsr,r0
/* disable interrupt */
MRS r0, cpsr
MOV r1, #INT_BIT
ORR r0, r0, r1
MSR cpsr_cxsf, r0
...
setup_stk :
/* setup stack */
LDR r0, stack
LDR r1, stacksz
...
entry :
LDR r0, =bldr_args_addr
/* 跳转到C代码 main 入口 */
B main
init.s 主要干的事情是切换系统到管理模式(svc)(如果平台有实现el3,那么pre-loader运行在el3,否则运行在el1),禁止irq/fiq,设置stack等, 然后jump到c代码main函数入口。
进入源码分析。
./bootloader/preloader/platform/mt6580/src/core/main.c
void main(u32 *arg)
{
struct bldr_command_handler handler;
u32 jump_addr, jump_arg;
/* get the bldr argument */
bldr_param = (bl_param_t *)*arg;
// 初始化uart
mtk_uart_init(UART_SRC_CLK_FRQ, CFG_LOG_BAUDRATE);
// 这里干了很多事情,包括各种的平台硬件(timer,pmic,gpio,wdt...)初始化工作.
bldr_pre_process();
handler.priv = NULL;
handler.attr = 0;
handler.cb = bldr_cmd_handler;
// 这里是获取启动模式等信息保存到全局变量g_boot_mode和g_meta_com_type 中.
BOOTING_TIME_PROFILING_LOG("before bldr_handshake");
bldr_handshake(&handler);
BOOTING_TIME_PROFILING_LOG("bldr_handshake");
// 下面跟 secro img 相关,跟平台设计强相关.
/* security check */
sec_lib_read_secro();
sec_boot_check();
device_APC_dom_setup();
BOOTING_TIME_PROFILING_LOG("sec_boot_check");
/* 如果已经实现EL3,那么进行tz预初始化 */
#if CFG_ATF_SUPPORT
trustzone_pre_init();
#endif
/* bldr_load_images
此函数要做的事情就是把lk从ROM中指定位置load到DRAM中,开机log中可以看到具体信息:
[PART] load "lk" from 0x0000000001CC0200 (dev) to 0x81E00000 (mem) [SUCCESS]
这里准备好了jump到DRAM的具体地址,下面详细分析.
*/
if (0 != bldr_load_images(&jump_addr)) {
print("%s Second Bootloader Load Failed\n", MOD);
goto error;
}
/*
该函数的实现体是platform_post_init,这里要干的事情其实比较简单,就是通过
hw_check_battery去判断当前系统是否存在电池(判断是否有电池ntc脚来区分),
如果不存在就陷入while(1)卡住了,所以在es阶段调试有时候
需要接电源调试的,就需要改这里面的逻辑才可正常开机
*/
bldr_post_process();
// atf 正式初始化,使用特有的系统调用方式实现.
#if CFG_ATF_SUPPORT
trustzone_post_init();
#endif
/* 跳转传入lk的参数,包括boot time/mode/reason 等,这些参数在
platform_set_boot_args 函数获取。
*/
jump_arg = (u32)&(g_dram_buf->boottag);
/* 执行jump系统调用,从 pre-loader 跳转到 lk执行,
如果实现了EL3情况就要
复杂一些,需要先跳转到EL3初始化,然后再跳回lk,pre-loader执行在EL3,
LK执行在EL1)
从log可以类似看到这些信息:
[BLDR] jump to 0x81E00000
[BLDR] <0x81E00000>=0xEA000007
[BLDR] <0x81E00004>=0xEA0056E2
*/
#if CFG_ATF_SUPPORT
/* 64S3,32S1,32S1 (MTK_ATF_BOOT_OPTION = 0)
* re-loader jump to LK directly and then LK jump to kernel directly */
if ( BOOT_OPT_64S3 == g_smc_boot_opt &&
BOOT_OPT_32S1 == g_lk_boot_opt &&
BOOT_OPT_32S1 == g_kernel_boot_opt) {
print("%s 64S3,32S1,32S1, jump to LK\n", MOD);
bldr_jump(jump_addr, jump_arg, sizeof(boot_arg_t));
} else {
// 如果 el3 使用aarch64实现,则jump到atf.
print("%s Others, jump to ATF\n", MOD);
bldr_jump64(jump_addr, jump_arg, sizeof(boot_arg_t));
}
#else
bldr_jump(jump_addr, jump_arg, sizeof(boot_arg_t));
#endif
// 如果没有取到jump_addr,则打印错误提示,进入while(1)等待.
error:
platform_error_handler();
}
main 函数小结:
1、各种硬件初始化(uart、pmic、wdt、timer、mem..);
2、获取系统启动模式等,保存在全局变量中;
3、Security check,跟secro.img相关;
4、如果系统已经实现el3,则进入tz初始化;
5、获取lk加载到DRAM的地址(固定值),然后从ROM中找到lk分区的地址, 如果没找到jump_addr,则 goto error;
6、battery check,如果没有电池就会陷入while(1);
7、jump到lk(如果有实现el3,则会先jump到el3,然后再回到lk)
3、重点函数分析
bldr_load_images
函数主要干的事情就是找到lk分区地址和lk加载到DRAM中的地址, 准备好jump到lk执行,如下源码分析:
static int bldr_load_images(u32 *jump_addr)
{
int ret = 0;
blkdev_t *bootdev;
u32 addr = 0;
char *name;
u32 size = 0;
u32 spare0 = 0;
u32 spare1 = 0;
...
/* 这个地址是一个固定值,可以查到定义在:
./bootloader/preloader/platform/mt6580/default.mak:95:
CFG_UBOOT_MEMADDR := 0x81E00000
从log中可以看到:
[BLDR] jump to 0x81E00000
*/
addr = CFG_UBOOT_MEMADDR;
/* 然后去ROM找到lk所在分区地址 */
ret = bldr_load_part("lk", bootdev, &addr, &size);
if (ret)
return ret;
*jump_addr = addr;
}
// 这个函数逻辑很简单,就不需要多说了.
int bldr_load_part(char *name, blkdev_t *bdev, u32 *addr, u32 *size)
{
part_t *part = part_get(name);
if (NULL == part) {
print("%s %s partition not found\n", MOD, name);
return -1;
}
return part_load(bdev, part, addr, 0, size);
}
// 真正的load实现是在part_load函数.
int part_load(blkdev_t *bdev, part_t *part, u32 *addr, u32 offset, u32 *size)
{
int ret;
img_hdr_t *hdr = (img_hdr_t *)img_hdr_buf;
part_hdr_t *part_hdr = &hdr->part_hdr;
gfh_file_info_t *file_info_hdr = &hdr->file_info_hdr;
/* specify the read offset */
u64 src = part->startblk * bdev->blksz + offset;
u32 dsize = 0, maddr = 0;
u32 ms;
// 检索分区头是否正确。
/* retrieve partition header. */
if (blkdev_read(bdev, src, sizeof(img_hdr_t), (u8*)hdr,0) != 0) {
print("[%s]bdev(%d) read error (%s)\n", MOD, bdev->type, part->name);
return -1;
}
if (part_hdr->info.magic == PART_MAGIC) {
/* load image with partition header */
part_hdr->info.name[31] = '\0';
/*
输出分区的各种信息,从log中可以看到:
[PART] Image with part header
[PART] name : lk
[PART] addr : FFFFFFFFh mode : -1
[PART] size : 337116
[PART] magic: 58881688h
*/
print("[%s]Img with part header\n", MOD);
print("[%s]name:%s\n", MOD, part_hdr->info.name);
print("[%s]addr:%xh\n", MOD, part_hdr->info.maddr);
print("[%s]size:%d\n", MOD, part_hdr->info.dsize);
print("[%s]magic:%xh\n", MOD, part_hdr->info.magic);
maddr = part_hdr->info.maddr;
dsize = part_hdr->info.dsize;
src += sizeof(part_hdr_t);
memcpy(part_info + part_num, part_hdr, sizeof(part_hdr_t));
part_num++;
} else {
print("[%s]%s img not exist\n", MOD, part->name);
return -1;
}
// 如果maddr没有定义,那么就使用前面传入的地址addr.
if (maddr == PART_HEADER_MEMADDR/*0xffffffff*/)
maddr = *addr;
if_overlap_with_dram_buffer((u32)maddr, ((u32)maddr + dsize));
ms = get_timer(0);
if (0 == (ret = blkdev_read(bdev, src, dsize, (u8*)maddr,0)))
*addr = maddr;
ms = get_timer(ms);
/* 如果一切顺利就会打印出关键信息:
[PART] load "lk" from 0x0000000001CC0200 (dev) to 0x81E00000 (mem) [SUCCESS]
[PART] load speed: 25324KB/s, 337116 bytes, 13ms
*/
print("\n[%s]load \"%s\" from 0x%llx(dev) to 0x%x (mem) [%s]\n", MOD,
part->name, src, maddr, (ret == 0) ? "SUCCESS" : "FAILED");
if( ms == 0 )
ms+=1;
print("[%s]load speed:%dKB/s,%d bytes,%dms\n", MOD, ((dsize / ms) * 1000) / 1024, dsize, ms);
return ret;
}
bldr_post_process
函数主要干的事情就是从pmic去检查是否有电池存在,如果没有就等待, 如下源码分析,比较简单:
// 就是包了一层而已.
static void bldr_post_process(void)
{
platform_post_init();
}
// 重点是这个函数:
void platform_post_init(void)
{
/* normal boot to check battery exists or not */
if (g_boot_mode == NORMAL_BOOT && !hw_check_battery() && usb_accessory_in()) {
...
pl_charging(1);
do {
mdelay(300);
/* 检查电池是否存在, 如果使用电源调试则需要修改此函数逻辑 */
if (hw_check_battery())
break;
/* 喂狗,以免超时被狗咬 */
platform_wdt_all_kick();
} while(1);
/* disable force charging mode */
pl_charging(0);
}
...
}
Pre-loader 到 Lk的源码分析到这就完成了.