Chipsets
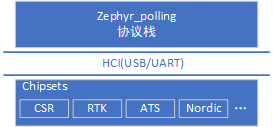
本项目主要实现了蓝牙Host协议栈,并没有包含Controller部分,如果需要实现蓝牙交互,按照Core Spec,需要通过HCI接口连接其他蓝牙芯片实现蓝牙功能。
由于HCI接口层是Spec有规定的,所以只要符合HCI接口的设备理论上都可以使用本项目的协议栈实现蓝牙功能。但是各家方案不同,存在一些特殊的配置行为,所以需要根据具体情况具体调整。
如下图所示,通过HCI接口,可以对接CSR/RTK/ATS/Nordic等厂商的蓝牙芯片,从而实现蓝牙功能。
HCI接口
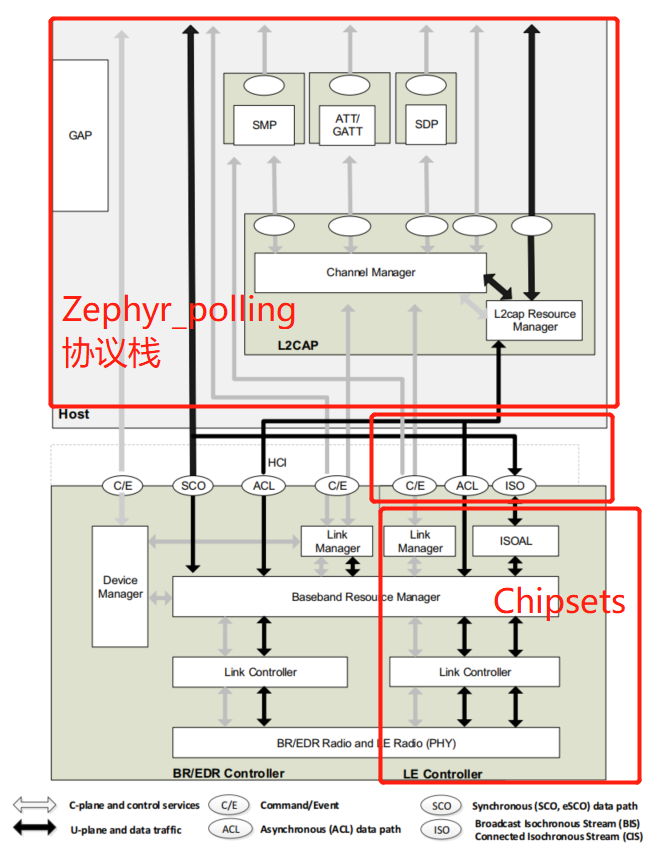
在Sig定义中,Host和Controller通过HCI接口进行通信。HCI协议本身只有5种接口。包括Command、Event、ACL、SCO以及ISO接口。
如下图所示,BLE只支持Command、Event、ACL和ISO数据通道,由于目前项目只完成BLE,并不涉及BLE Audio业务,所以只使用上述的3种接口,分别是:Command、Event和ACL接口。
-
Command:Host到Controller的单向通道,主要传输Host发送给Controller的控制指令;
-
Event:Controller到Host的单向通道,主要传输Controller上报给Host的事件;
-
ACL:双向通道,承载了两个设备之间的数据交互;
-
ISO:双向通道,承载了两个设备之间的音频数据交互;
HCI包格式
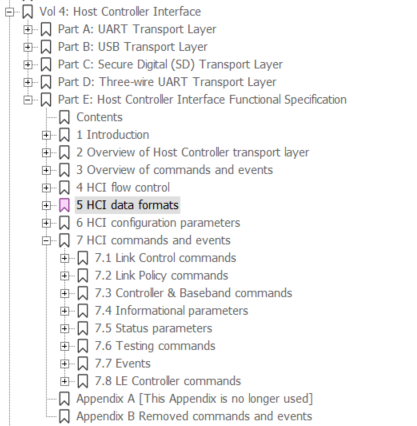
在Sig提供的Core Spec5.3中的Vol4中对HCI层有详细说明,重点说明了各个通道的包格式以及HCI command和events。
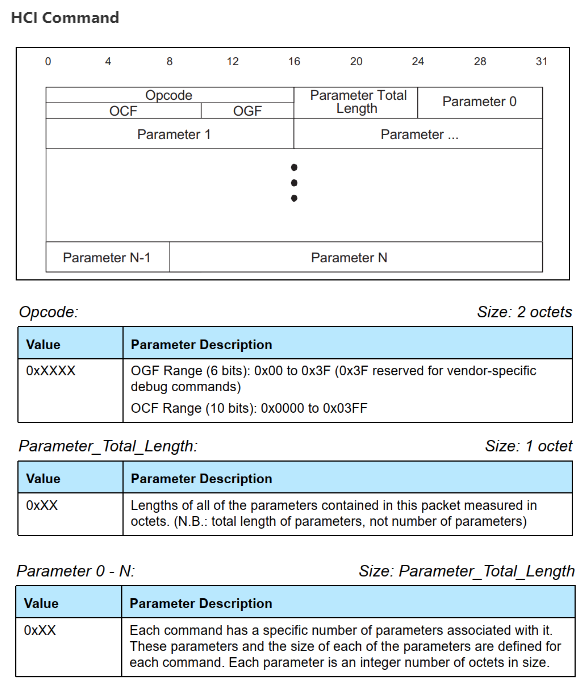
HCI Command包格式
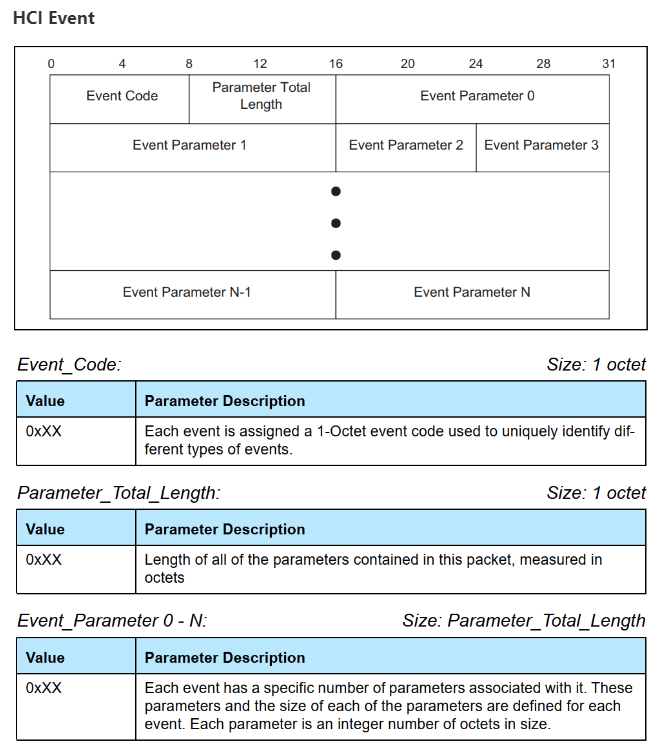
HCI Event包格式
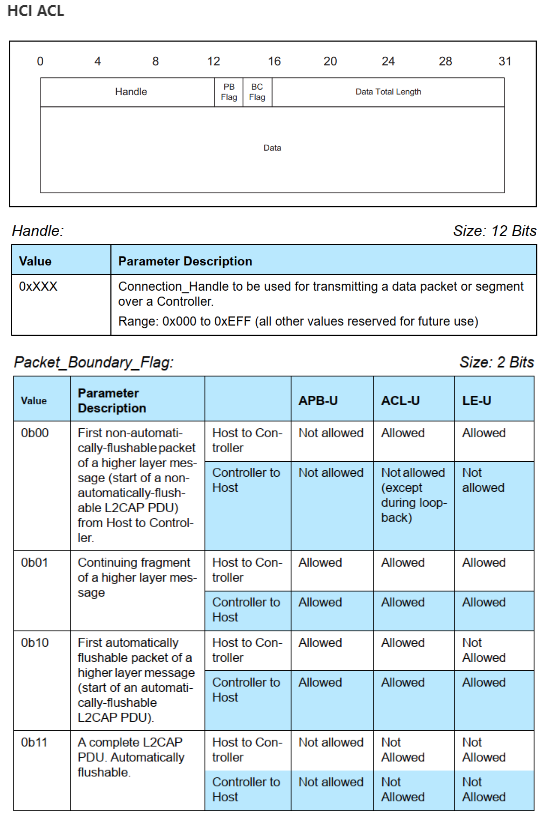
HCI ACL包格式

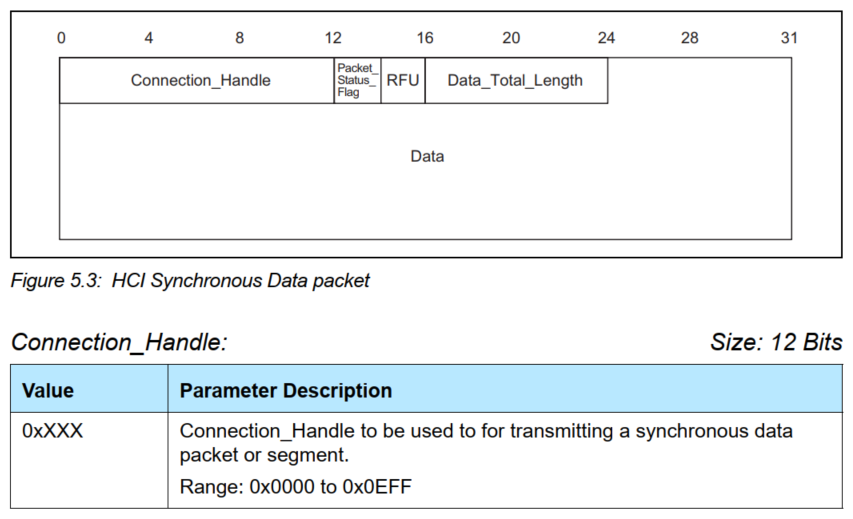
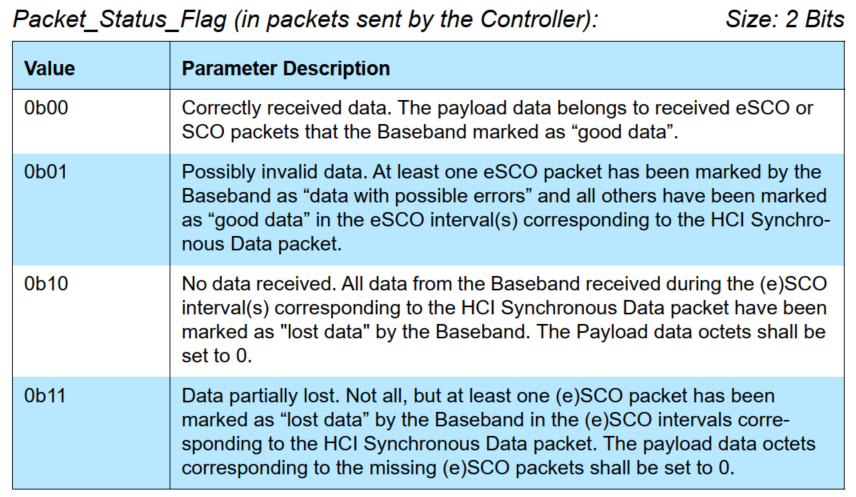
HCI ISO包格式

HCI接口类型
由于物理传输接口的不同,在HCI包格式的基础上,还会加入接口层协议,去固定不同接口类型下HCI数据包如何进行数据收发。
UART接口(H4)
通常也被称之为H4接口,其结构如下所示。
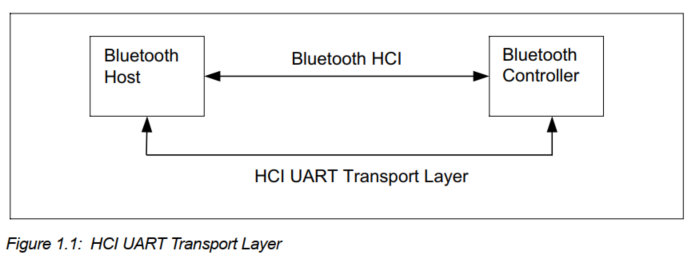
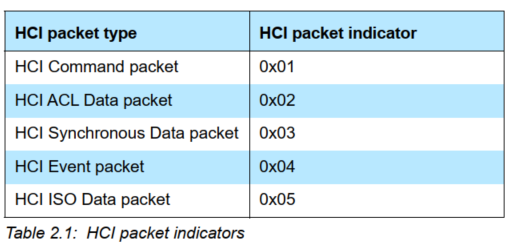
在原本HCI交互的基础上,需要加入1个字节的Packet Type。
也就是说,HCI Reset Command,按照Sig来说是03 0C 00,通过UART发送时就变成为01 03 0C 00,在开始的时候加入了1个字节的Packet type。
注意:由于UART接口的不确定性,一般UART接口都会开启流控,不然在大数据吞吐时容易丢包。但是这样的话需要连接的IO就需要5根了,TX/RX/CTS/RTS/GND。
注意,由于UART本身没有同步接口,对于SCO等同步数据交互,该接口的体验并不是很好。
注意:UART接口一般需要确认串口号,波特率,流控等参数,这些参数根据不同厂商有不同的定义。在不开启流控的芯片中可以不接CTS/RTS接口。
3线UART接口(H5)
一般的UART接口加上流控就有TX/RX/CTS/RTS/GND5个IO了,对于资源有限的场景,IO很多时候并不充裕,并且就算加上流控,当UART接口收到错误数据时,依然无法实现重传,进而整个协议栈就崩溃了。
考虑到这个情况,Sig提出了既省IO,又有流控、重传和唤醒功能的H5接口。通过在UART接口上加上一层协议来实现这一功能需要。该方案只需要TX/RX/GND三个IO,所以又称之为3线UART。
其架构如下,通过协议来保证数据交互的可靠性。具体可以看Core Spec。
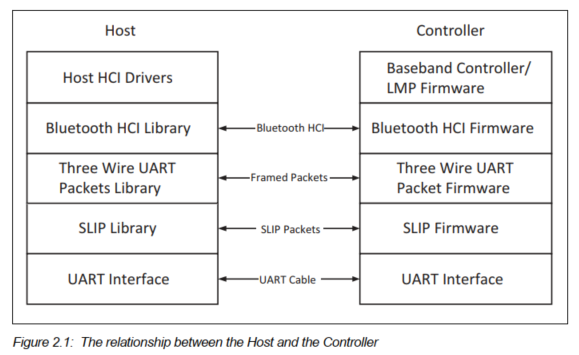
H5协议的功能较为完善,但是其实现较为复杂,占用系统资源不少,对系统可靠性和资源有限场景会使用该协议。
USB接口(H2)
目前市面上大多数HCI Dongle都是使用这一接口协议,借助于USB接口的高速和可靠性,完全可以满足HCI数据/音频传输要求。实际的PC蓝牙Dongle设备很多都是使用USB接口。
在spec中规定了USB接口行为,Host一般作为USB Host端,Controller为USB Controller。

两个USB Dongle设备的交互框图如下所示。
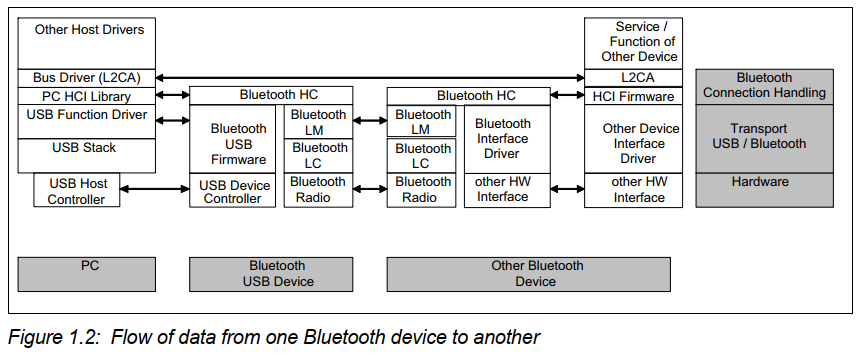
USB接口关键就是数据交互的端点配置,针对于蓝牙HCI接口的特点,SPEC定义了多种接口来分别承载不同类型的数据交互。
如下所示,Command通过0x00的Control Endpoint传输,Event数据包通过0x81的Interrupt Endpoint传输,ACL数据包通过0x82和0x02的Buck接口进行传输。
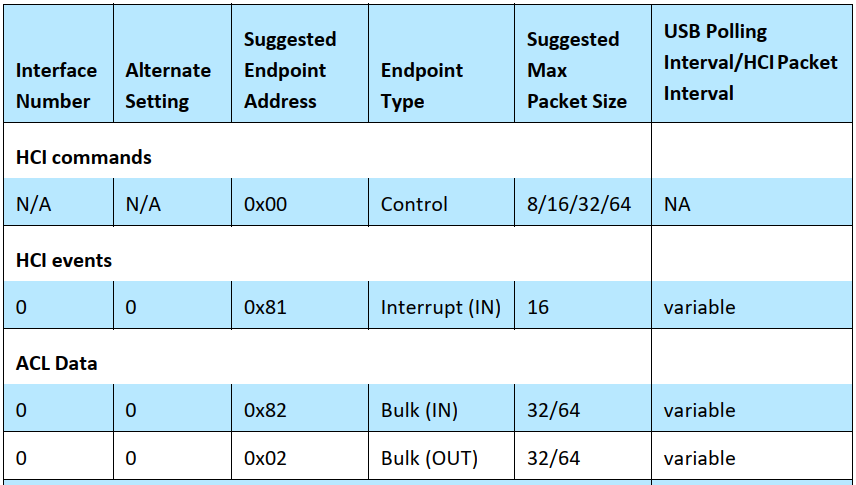
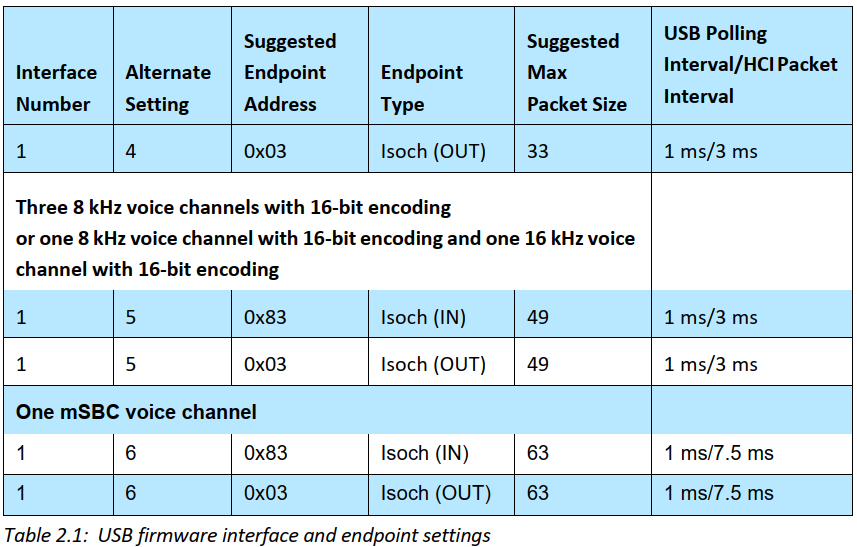
音频传输通过Isoch端口传输,此外又根据不同的同步传输格式,固定了不同的接口行为。

在本项目中,也是按照Spec规定了完成和USB设备的数据交互,详见:platform/windows/windows_driver_libusb.c。

注意,在嵌入式产品中,由于嵌入式主芯片资源受限,一般而言都是使用UART接口,部分场景下会使用SPI/SDIO接口。
SD接口
基于SDIO接口来完成HCI数据交互。
其架构如下,由于笔者实际项目也没怎么用,就不在多数,实际使用看芯片手册定义,基本都会按照SPEC来配置接口。

H4 over SPI
UART接口需要确定的波特率,对于一些高速需求并不是很好满足,并且可移植性相对较差。SPI接口由master提供时钟,无需预先知道两边的波特率配置即可进行通信。
目前ST主推的是SPI接口的HCI Controller,详见BlueNRG-2 - 蓝牙低功耗无线单芯片 - STMicroelectronics。
由于笔者基本没有用过这个接口,并且这个接口在Spec并未定义,所以也不具体展开,具体使用到特定芯片时,按照产商的要求使用即可。
芯片启动配置
目前市面上的HCI Dongle产品大多数并不能拿来直接使用,也就是说在用标准的HCI指令控制设备进行蓝牙操作之前,需要提前通过Vendor Command对设备进行配置,只有正确配置好的设备才能正常使用。
为什么厂商不将设备配置为上电就能完成HCI蓝牙交互行为呢,反而需要配置这么多参数呢,这样并不利于用户使用。
从产商角度来看。类似于HCI Dongle之类的产品一般而言是由芯片产商提供固件预烧录在芯片中,而芯片产商只出售芯片,并不关注外围电路和具体的产品形态,这些是具体的ODM厂商来实现的。也就是芯片产商提供带HCI蓝牙功能的芯片,ODM设计电路并设计产品,之后通过HCI和芯片进行交互。实际各家ODM产商的需求各不相同,芯片产商为了满足不同客户的需要,并且为了减少和客户的对接,就必然在同一套代码的基础上,需要提供一系列的配置参数来满足不同ODM厂商的需要。
从使用角度来看。首先一点,像HCI Dongle这类产品一方面是提供给专业用户使用,如开发人员等,这些人使用之前必然要查看产商的手册进行配置;而像蓝牙适配器这类产品对应的PC都有相应的驱动程序,用户安装产商提供的驱动程序就可以正常使用产品,驱动程序屏蔽了HCI接口,也完成了相关配置。也就是说这样的行为并不影响绝大多数用户的使用。
根据各家芯片产商的情况,所需配置的参数和种类各不相同,下面对一些参数配置进行说明。
注意,由于嵌入式资源有限,现有市面上的产品基本都是通过HCI的Vendor Cmd/Event接口来实现对设备的参数配置行为。
固件烧录
以Realtek为典型,这类芯片产品的代码基本都存储在ROM中,一个品类的产品ROM在芯片TO阶段就已经固定下来了,之后需要修改BUG或者加新功能时,就需要重新调整ROM,这样芯片产商需要维护的成本过高,并且不同应用场景所需的代码并不相同,所有都放入ROM中会导致芯片成本过大。
那么其芯片结构基本为ROM+Patch形式,Patch如果存储在Flash之类的形态中,对于终端用户其实也无感,使用之前预烧录好特定的Patch即可(Nordic/ST/Actions之类都有Flash)。可是以Realtek/CSR的厂商所提供的芯片并没有Flash,而是有一个较大的Patch RAM,由于RAM掉电后就会丢失,所以在每次上电时都需要通过HCI将最新的固件下载到Patch RAM中,不然默认出厂的ROM大多数情况下是工作异常的。
Patch RAM的形式虽然省却了Flash的成本,但是在低功耗产品时,由于Patch RAM一般都不小,其功耗普遍较高。并且RAM都是芯片成本,在设计之初就定好了,太大成本过高/功耗过高。太小的话能满足的应用场景就较少。
同时由于每次掉电都需要烧录新的固件,要使用蓝牙功能之前准备时间都是百ms级别,对一些特定应用场景需要还是有点繁琐的。
蓝牙地址配置
由于蓝牙地址都是需要向Sig花钱买的,有一些芯片厂商(ST/CSR)将这部分成本转嫁到ODM和终端用户上(很多时候ODM和终端用户也并不会付费,由于他们体量较小,Sig一般也追不回这些费用)。基于这一实际需求,芯片产商会提供一个Vendor Command专门来实现蓝牙地址的配置,美曰其名给用户配置权利,实际大家懂的都懂。
硬件接口配置
如RF接口,晶振类型等,CSR的需要配置这些,如当前的RF接口的配置,系统时钟源,低功耗时钟源等硬件接口的配置,这个大厂灵活性较大,所需配置的东西就较多,大多数产品形态基本不需要管这些。
串口波特率配置
大多数是UART接口,一般默认都是运行在115200的配置下,但是这个速度太慢了,有时需要切换成更高的波特率。
其他参数配置
按照厂商手册需要配置即可。
无需配置
对于有Flash的芯片,如(Nordic/ST/Actions)等产商的芯片,完全可以将配置参数和Patch Code预烧录到Flash中,使用时完全不需要配置任何参数,直接通过HCI接口操作使用即可。
芯片BOOT操作接口
zephyr_polling协议栈需要满足不同芯片的使用需要,而这些不同产商的特殊配置需要放在协议栈内部并不方便,并且也不利于后期用户添加新的chipset。从上述分析已经知道现在市面上芯片的启动配置需求,所以围绕于这些功能需要,项目提供了Boot流程接口和Prepare流程接口。
系统启动流程如下,先进行Boot流程,之后下发HCI Reset Command,而后进行Prepare流程,最后进行常规的HCI boot流程。
整个协议栈的HCI初始化流程是通过状态机来管理的,通过hci_state_polling()轮询进行调度,chipset通过bt_hci_chipset_driver_register()注册操作接口。

Boot流程接口
用于完成厂商的初始化流程,如固件下载,蓝牙地址配置等。
chipset注册好接口后,协议栈启动时会通过boot_start()回调启动chipset的boot流程,由于操作接口是HCI,所以一般都是下发一个Vendor Command,然后根据Vendor Event来进行后续动作,协议栈会通过event_process()回调接口将收到的event上报给chipset,当chipset认为操作结束时,通过调用bt_hci_set_boot_ready()接口通知协议栈boot流程结束。
Prepare流程接口
照理说Boot流程已经完成了厂商的参数配置等工作,为什么还需要定义一个Prepare流程呢?这是因为类似于ST厂商的参数要求在HCI_Reset Command之后进行,也就是说HCI_Reset Command会清空配置的参数。
所以为了兼容这类参数形态,HCI_Reset Command之后还需要进行Prepare流程,协议栈收到HCI_Reset的Command Complete Event后会通过prepare_start()回调启动chipset的Prepare流程,和boot流程一样,协议栈会通过event_process()回调接口将收到的event上报给chipset,当chipset认为操作结束时,通过调用bt_hci_set_prepare_ready()接口通知协议栈prepare流程结束。
支持芯片列表
协议栈在不断完善中,后续会陆续加入更多支持的芯片,大家需要的话可以购买所需的Dongle来验证本项目协议栈,当然也可以在自家的芯片上,实现chipset接口,来玩本项目。
芯片厂商配置说明
CSR / Qualcomm Incorporated
CSR目前已经被高通收购了,但是市面上还有蛮多CSR的Dongle在卖。
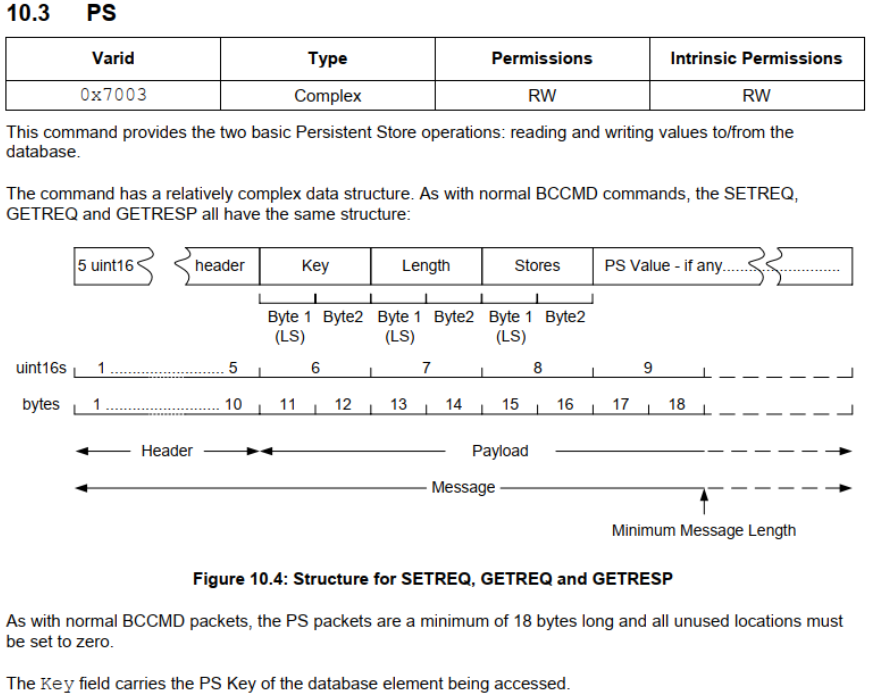
市面上卖得比较多,有一套csr得命令,叫做《BCCMD Protocol》,利用里面的PS Command中《PSKEY_BDADDR》设置蓝牙地址。

csr8510
市面买到的蓝牙适配器很多是这个。USB接口。
Boot流程,主要完成如下操作:关闭NOP;设置蓝牙地址;warn重启。
Prepare流程,None。
csr8910
市面买到的蓝牙适配器很多是这个。USB接口。
Boot流程,主要完成如下操作:模拟参数配置;关闭NOP;启动串口流控;设置蓝牙地址;warn重启。
Prepare流程,None。
ST
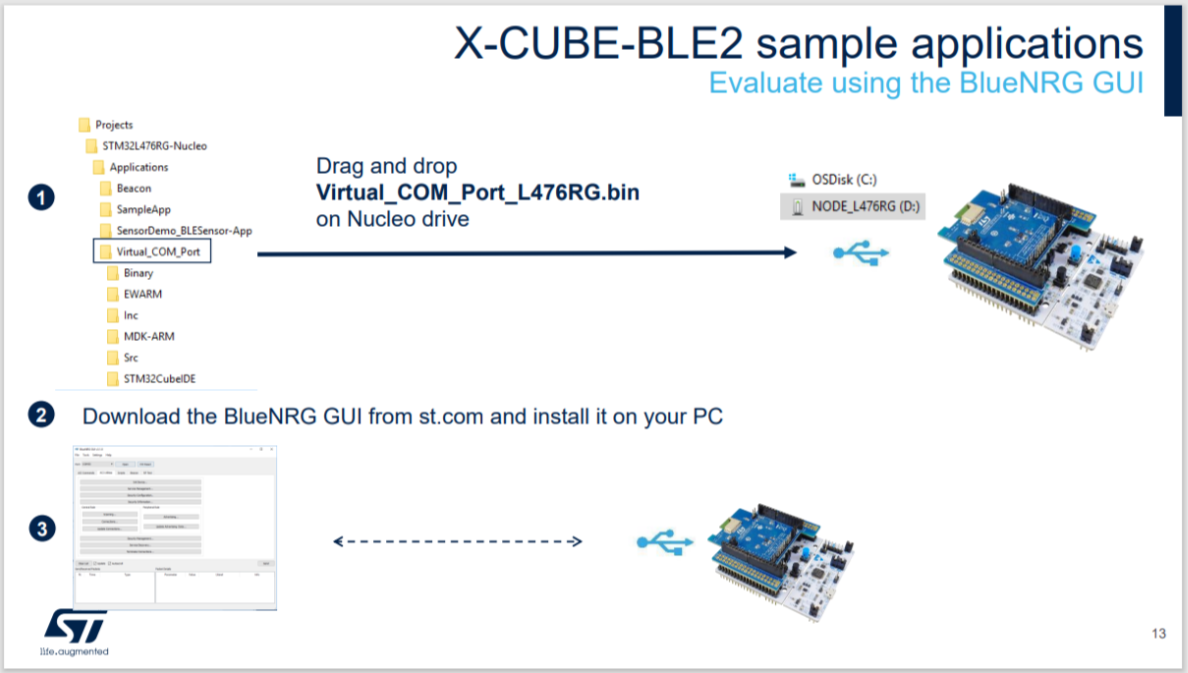
ST推出了一套叫BlueNRG的ble东西,按照其官方推荐,到淘宝上分别买《X-NUCLEO-BNRG2A1》和《NUCLEO-L476RG》 开发板。
《X-NUCLEO-BNRG2A1》预烧录了BLE+SPI的程序。
《NUCLEO-L476RG》 按照下图,烧录一个Virtual_COM_Port的程序,就可以在PC上通过Uart控制蓝牙芯片了。
默认其推荐的是用《BlueNRG GUI》来控制。
ST的《X-NUCLEO-BNRG2A1》中的BLE本身是一个SOC,里面集成了Host的协议栈,ST提供了一套ACI指令来控制芯片行为,包括host的接口。
也就是说默认的情况下,这个芯片的ACL交互都被芯片接管了,所以需要通过ACI命令,关闭Host行为。必须通过《aci_hal_write_config_data》将《LL_WITHOUT_HOST》关闭。
public地址通过必须通过《aci_hal_write_config_data》将《CONFIG_DATA_PUBADDR_OFFSET》配置蓝牙地址。
注意,官方提供的Virtual_COM_Port代码并不支持将ACL转发的功能,此外在压力测试时,由于其代码写的可靠性不高,会有丢包等问题,需要自己把这块串口接收转发的代码逻辑给修改掉。

CSR目前已经被高通收购了,但是市面上还有蛮多CSR的Dongle在卖。
市面上卖得比较多,有一套csr得命令,叫做《BCCMD Protocol》,利用里面的PS Command中《PSKEY_BDADDR》设置蓝牙地址。
BlueNRG-2
LE Only的SOC,第二代产品,需要在其原本代码上进行修改进行使用。
Boot流程,None。
Prepare流程,蓝牙地址配置;关闭Host功能;设置TX power;GATT配置;GAP配置。
Nordic
nordic作为行业龙头,其芯片是全Flash的芯片,其并没有出专门的蓝牙适配器,但是市面上还是能购买到一些用他们家产品做的的HCI Dongle,并且Sig也用NRF52840做了PTS Dongle,用于Host的认证。
nordic的蓝牙地址是每个芯片唯一,厂商预先配置好了(没细的研究)。
PTS Dongle
Sig用NRF52840做的一个HCI Dongle,可以说是最标准蓝牙行为的蓝牙Dongle了。所有的参数都是在Flash配置好的,直接使用即可。每个芯片有独立的蓝牙地址。
Boot流程,None。
Prepare流程,None。
炬芯-Actions
通过绿联的5.3 Dongle认识的,。
ats2851
绿联在卖的5.3 Dongle,应该也是Flash版本的芯片,每个设备的蓝牙地址都是唯一的,无需配置。
Boot流程,None。
Prepare流程,None。