以下原图中,物体连靠在一起,目的是将其分割开,再提取轮廓和定位
原图: 
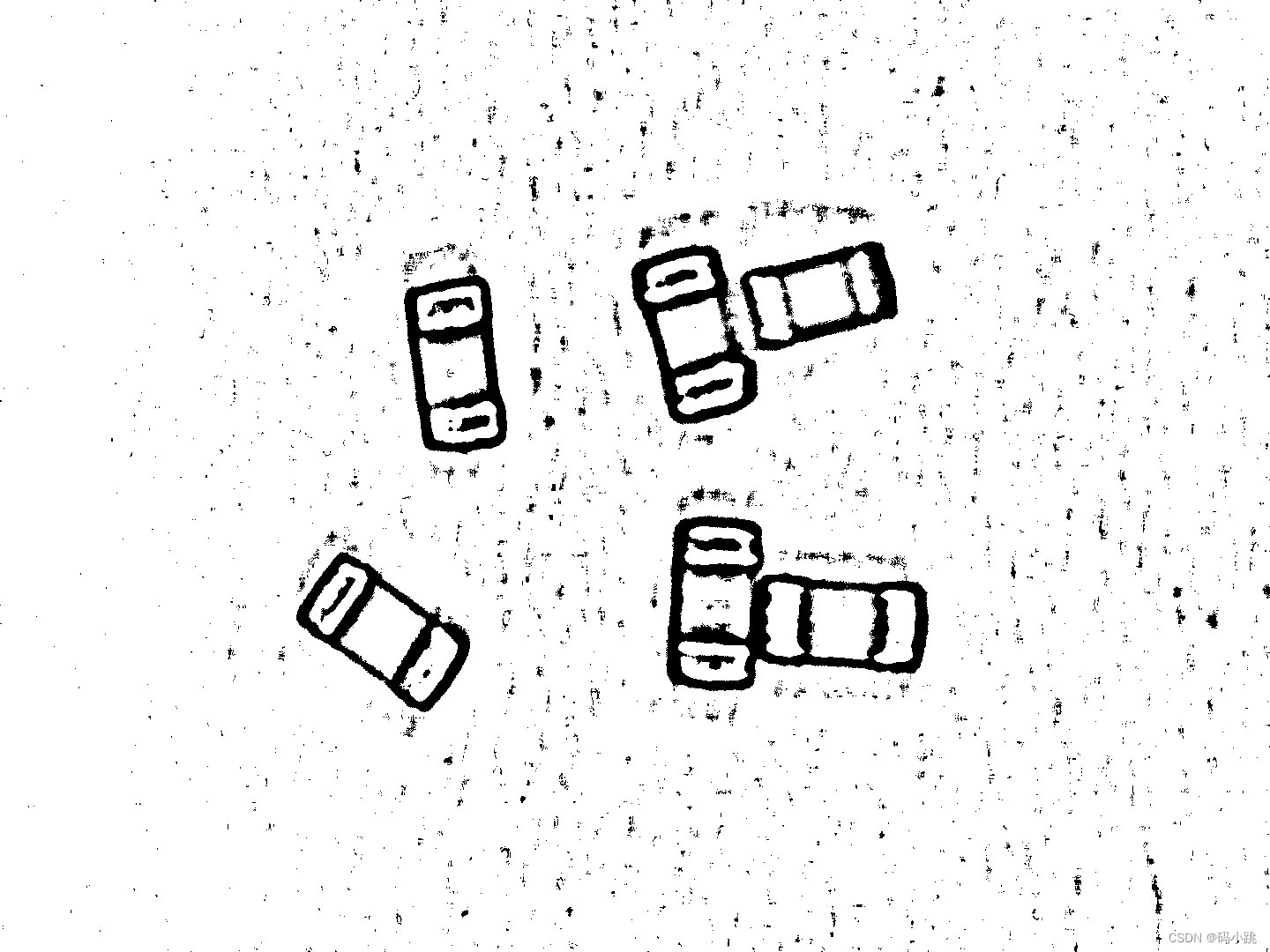
最终效果:

麻烦的地方是,分割开右下角部分,两个连在一起的目标物体,下图所示: 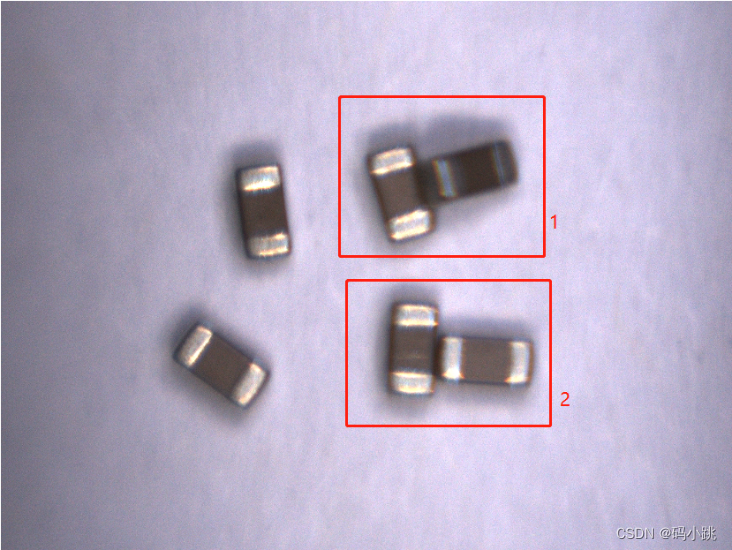
基本方法:BoxFilter滤波、二值化、轮廓提取,凸包检测,图像的矩
代码如下:
/// <summary>
/// 获取分割点
/// </summary>
/// <param name="contours"></param>
/// <param name="contourCount"></param>
/// <param name="arcLength"></param>
/// <param name="farDistance"></param>
/// <returns></returns>
public List<Point> GetSplitPoints(Point[][] contours, List<int> contourCount, int arcLength, int farDistance)
{
#region 凸包检测
List<double> lArc = new List<double>();
//Mat src = srcImage.Clone();
List<Point[]> lpContours = new List<Point[]>();
List<int> hulls = new List<int>();
Point lastP = new Point();
Point firstP = new Point();
Point farLastP = new Point();
List<Point> lps = new List<Point>();
int dot = 1;
List<int> depth = new List<int>();
for (int i = 0; i < contourCount.Count; i++)
{
InputArray inputArray = InputArray.Create<Point>(contours[contourCount[i]]);
OutputArray outputArray = OutputArray.Create(hulls);
Cv2.ConvexHull(inputArray, outputArray, false, false);
if (Cv2.ArcLength(inputArray, true) < arcLength)
{
//lArc.Add(Cv2.ArcLength(inputArray, true));
continue;
}
//前三个值得含义分别为:凸缺陷的起始点,凸缺陷的终点,凸缺陷的最深点(即边缘点到凸包距离最大点)。
var defects = Cv2.ConvexityDefects(contours[contourCount[i]], hulls);
for (int j = 0; j < defects.Length; j++)
{
OpenCvSharp.Point start = contours[contourCount[i]][defects[j].Item0];
OpenCvSharp.Point end = contours[contourCount[i]][defects[j].Item1];
OpenCvSharp.Point far = contours[contourCount[i]][defects[j].Item2];
//OpenCvSharp.Point fart = contours[contourCount[i]][defects[j].Item3];
if (defects[j].Item3 > farDistance) //(4500 < defects[j].Item3 && defects[j].Item3 < 300000)
{
lps.Add(contours[contourCount[i]][defects[j].Item2]);
depth.Add(defects[j].Item3);
}
}
}
#endregion
return lps;
}
/// <summary>
/// 获取最小内接矩形
/// </summary>
/// <param name="contours"></param>
/// <param name="contourCount"></param>
/// <returns></returns>
public List<RotatedRect> GetMinRects(Point[][] contours, List<int> contourCount)
{
//Cv2.ImShow(",mmmm", morphImage);
//double rotateAngel = 0;
Point2f[] vertices = new Point2f[4];
//Point2f minRectcenterPoint = new Point2f();
List<RotatedRect> minRects = new List<RotatedRect>();
for (int i = 0; i < contourCount.Count; i++)
{
//获取轮廓点的矩形区域
//绘制Rio区域最小矩形
#region 绘制Rio区域最小矩形
RotatedRect minRect = Cv2.MinAreaRect(contours[contourCount[i]]);
minRects.Add(minRect);
#endregion
}
return minRects;
}
/// <summary>
/// 返回设置范围内的轮廓
/// </summary>
/// <param name="mat"></param>
/// <param name="range1"></param>
/// <param name="range2"></param>
/// <param name="contourCount"></param>
/// <returns></returns>
public Point[][] GetImageContours(Mat mat, int length, out List<int> contourCount)
{
List<double> arclength = new List<double>();
OpenCvSharp.Point[][] contours;
HierarchyIndex[] hierarchies;
//Cv2.ImShow(",mmmm", mat);
Cv2.FindContours(mat, out contours, out hierarchies, RetrievalModes.External, ContourApproximationModes.ApproxSimple, new Point());
Mat connImg = Mat.Zeros(mat.Size(), MatType.CV_8UC3);
Point2f[] vertices = new Point2f[4];
Mat drawOutline = Mat.Zeros(mat.Size(), mat.Type());
int sum = 0;
contourCount = new List<int>();
for (int i = 0; i < contours.Length; i++)
{
Rect rect1 = Cv2.BoundingRect(contours[i]);
if (Cv2.ArcLength(contours[i], true) > length)//(rect1.Width > range1 && rect1.Height < range2)
{
Cv2.DrawContours(drawOutline, contours, i, new Scalar(255, 0, 255), 2, LineTypes.Link8, hierarchies);
contourCount.Add(i);
arclength.Add(Cv2.ArcLength(contours[i], true));
sum++;
}
}
Cv2.ImShow("contours", drawOutline);
return contours;
}
/// <summary>
/// 图像灰度
/// 盒子滤波 保留边缘信息
/// 自适应阈值 效果不错 无需形态学降噪
/// 取反操作
/// 过滤不需要轮廓信息(面积 边长)
/// 轮廓提取
/// (以上每一步都很重要,否则,无法获取良好的轮廓)
/// 凸包检测
/// 根据轮廓信息,查找大凸包,获取分割点
/// 重新操作图像
/// 在二值化图像时,分割连接点位置
/// 绘制轮廓
/// 绘制最小内接矩形和质心点
/// 识别目标位置完成
/// 注意:不同大小的图像处理时,需要修改自适应阈值参数、轮廓过滤面积、凸包检测的分割点过滤
/// </summary>
/// <param name="srcImage"></param>
/// <returns></returns>
public Mat PreProcess(Mat srcImage)
{
Mat grayMat = new Mat();
Cv2.CvtColor(srcImage, grayMat, ColorConversionCodes.BGRA2GRAY);
//Cv2.ImShow("grayMat", grayMat);
Mat blurImg = BoxFilter(grayMat);
//Cv2.ImShow("blurImg", blurImg);
// 注意:不同大小的图像处理时,需要修改参数
Mat threshold = new Mat();
Cv2.AdaptiveThreshold(blurImg, threshold, 255, AdaptiveThresholdTypes.MeanC, ThresholdTypes.Binary, 15, 2);
//Cv2.Threshold(threshold, threshold, 0, 255, ThresholdTypes.BinaryInv);
Cv2.ImShow("threshold", threshold);
//Mat morphImg = MorphImage(threshold, MorphShapes.Ellipse, MorphTypes.Dilate, 1, new OpenCvSharp.Size(3, 3));
//Cv2.ImShow("morphImg", morphImg);
//Mat cannyImg = new Mat();
//Cv2.Laplacian(morphImg2, cannyImg, MatType.CV_8UC3, 5, 1);//Cv2.Canny(morphImg, cannyImg, 30, 90);//3和4参数的 最佳比例在1/3和1/2之间
//Cv2.ImShow("cannyImg", cannyImg);
Mat bitwiseMat = new Mat();
Cv2.BitwiseNot(threshold, bitwiseMat);
Cv2.ImShow("bitwiseMat", bitwiseMat);
List<int> contourCount;
//轮廓提取
Point[][] contours = GetImageContours(bitwiseMat, 600, out contourCount);
//凸包检测
List<Point> lps = GetSplitPoints(contours, contourCount, 800, 4500);
// 注意:不同大小的图像处理时,需要修改参数
//重新处理
Cv2.AdaptiveThreshold(blurImg, threshold, 255.0, AdaptiveThresholdTypes.MeanC, ThresholdTypes.Binary, 13, 2);
Cv2.ImShow("threshold1", threshold);
//MorphImage(threshold, MorphShapes.Ellipse, MorphTypes.Close, 1, new OpenCvSharp.Size(3, 3));
//Cv2.ImShow("morphImg1", morphImg);
Cv2.BitwiseNot(threshold, bitwiseMat);
Cv2.ImShow("bitwiseMat1", bitwiseMat);
//提取凸显点坐标
if (lps.Count > 1)
{
Cv2.Line(bitwiseMat, lps[0], lps[1], Scalar.Black, 2, LineTypes.Link8);
}
Cv2.ImShow("bitwiseMat2", bitwiseMat);
//轮廓提取
contourCount.Clear(); // 注意:不同大小的图像处理时,需要修改length参数
Point[][] newContours = GetImageContours(bitwiseMat, 550, out contourCount);
List<RotatedRect> rotatedRects = GetMinRects(newContours, contourCount);
for (int i = 0; i < rotatedRects.Count; i++)
{
#region 绘制Rio区域最小矩形
Point2f[] vertices = rotatedRects[i].Points();
#endregion
//绘制最小矩形
#region 绘制最小矩形
Cv2.Line(srcImage, Convert.ToInt32(vertices[0].X), Convert.ToInt32(vertices[0].Y), Convert.ToInt32(vertices[1].X), Convert.ToInt32(vertices[1].Y), new Scalar(0, 0, 255), 2);
Cv2.Line(srcImage, Convert.ToInt32(vertices[0].X), Convert.ToInt32(vertices[0].Y), Convert.ToInt32(vertices[3].X), Convert.ToInt32(vertices[3].Y), new Scalar(0, 0, 255), 2);
Cv2.Line(srcImage, Convert.ToInt32(vertices[1].X), Convert.ToInt32(vertices[1].Y), Convert.ToInt32(vertices[2].X), Convert.ToInt32(vertices[2].Y), new Scalar(0, 0, 255), 2);
Cv2.Line(srcImage, Convert.ToInt32(vertices[2].X), Convert.ToInt32(vertices[2].Y), Convert.ToInt32(vertices[3].X), Convert.ToInt32(vertices[3].Y), new Scalar(0, 0, 255), 2);
//获取重心点
Moments M;
M = Cv2.Moments(vertices);
double cX = M.M10 / M.M00;
double cY = M.M01 / M.M00;
//显示目标中心并提取坐标点
Cv2.Circle(srcImage, (int)cX, (int)cY, 2, Scalar.Yellow, 2);
//Console.WriteLine("AngleRect_angle: {0}", minRect.Angle);
#endregion
}
Cv2.ImShow("srcImage", srcImage);
return null;
}
灰度图像后图像二值化:
图像取反

绘制轮廓

凸包检测,查找分割点,下图黄色点标记处即找到的分割点位置

将找到的分割点在二值化图像中,连接一条线后,重新轮廓识别即可分割

最小轮廓矩形提取和绘制,以及绘制质心位置
 到此,已将连接处分隔开
到此,已将连接处分隔开
注意:使用以上方法是需要根据图像大小设置部分参数,例如二值化处理参数、过滤轮廓形状大小,凸包检测点的获取等位置,需要根据实际情况设置参数;