import open3d as o3d
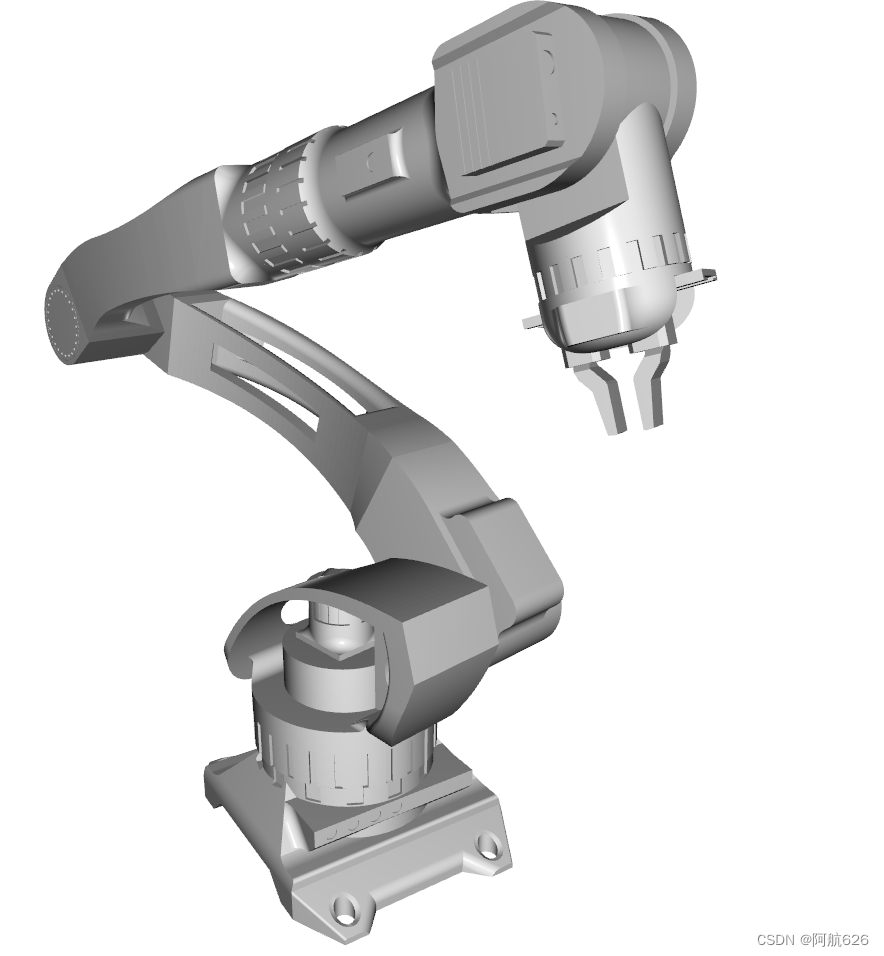
#模型路径,支持后缀:stl/ply/obj/off/gltf/glb path_obj = 'Rmk3.obj' #读入网格模型 mesh = o3d.io.read_triangle_mesh(path_obj) #计算网格顶点 mesh.compute_vertex_normals() #可视化网格模型 o3d.visualization.draw_geometries([mesh])
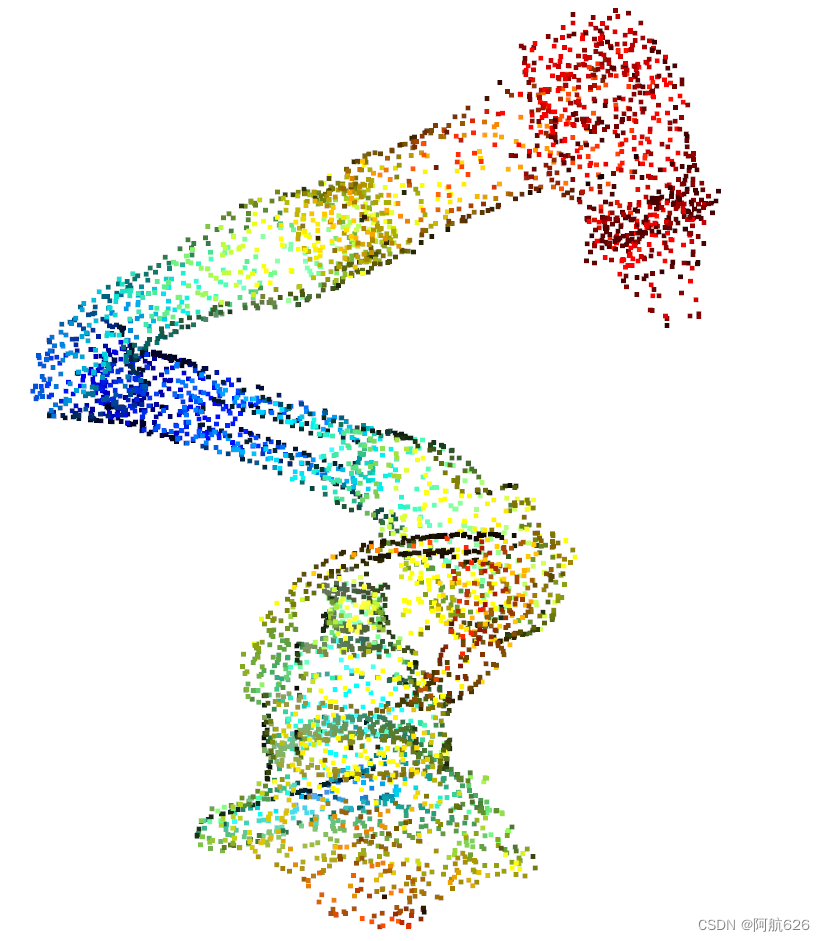
#均匀采样5000个点 pcd = mesh.sample_points_uniformly(number_of_points=5000) #可视化点云模型 o3d.visualization.draw_geometries([pcd])
#poisson_disk方法采样5000个点 pcd = mesh.sample_points_poisson_disk(number_of_points=5000, init_factor=10) #可视化点云模型 o3d.visualization.draw_geometries([pcd])
#保存 o3d.io.write_point_cloud("Rmk3.pcd", pcd)