目录
0、前言
1、PR控制器和PI控制器对比
1.1 传递函数表达式对比
1.2 波特图对比
2、离散化预备知识
2.1 离散化表达式
2.2 离散化方法
2.3 离散化练习题
3. 使用Matlab离散PR控制器
4、逆变器仿真模型中使用PR闭环控制器
0、前言
在一个闭环控制系统中,可分为输入参考值、闭环控制器、执行机构、输出参数,反馈系数,这几个部分。
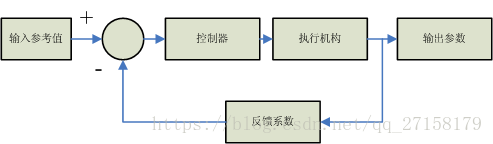
设计一款控制器,可以让系统的输出参数跟踪输入参考值,达到了控制的目的。在直流控制系统中,常用的控制器就是比例微分积分(Proportion Integration Differentiation,PID)控制器了。然而,在交流系统中,PID控制器由于对高频信号的跟踪性能较差,并不能满足设计要求。而PR控制器,对特定频率信号的跟踪效果是良好的。
本文首先对PR控制器和PI控制器进行对比。然后讨论了比例谐振(Proportion, Resonant, PR)控制器的数字化实现。笔者目前在一款DCDC电路中使用过PI控制器,同时PI控制器的资料比较好找。然而PR控制器只在软件仿真中使用过,并没有在实际项目中使用。
希望我和读者们,都能从本文中获益,谢谢。
1、PR控制器和PI控制器对比
1.1 传递函数表达式对比
比例积分控制器的传递函数如下:

比例谐振控制器的传递函数如下:

本文称这个PR控制器为理想的PR控制器。
以上的 这个控制器,在下文的波特图上可见,只对单一的频率起作用。但实际上,例如逆变器,参考波形可能在频率上有正负1Hz的变化,或者由于测量采样的不确定性,因此在运用中,会用以下的变形,替代上面的Gpr-ideal。
这个控制器,在下文的波特图上可见,只对单一的频率起作用。但实际上,例如逆变器,参考波形可能在频率上有正负1Hz的变化,或者由于测量采样的不确定性,因此在运用中,会用以下的变形,替代上面的Gpr-ideal。

本文称这个PR控制器为实际的PR控制器。
1.2 波特图对比
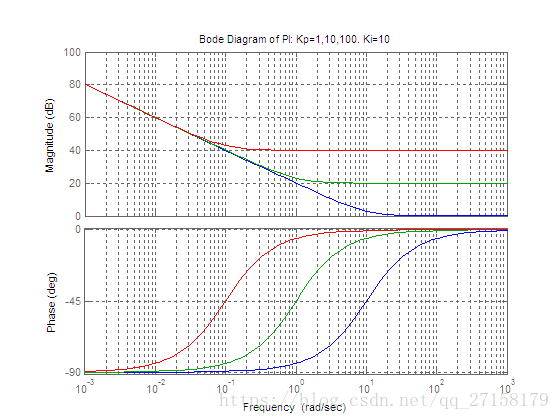
下图是当Kp分别取为1、10、100,Ki=10时PI控制器的波特图(蓝色是Kp=1,绿色是Kp=10,红色是Kp=100)。
附上实现代码:
% this is Matlab code:
Ki=10;
Kp=1;
PIs1=tf([Kp,Ki],[1,0])
Kp=10;
PIs2=tf([Kp,Ki],[1,0])
Kp=100;
PIs3=tf([Kp,Ki],[1,0])
bode(PIs1,PIs2,PIs3)
title('Bode Diagram of PI: Kp=1,10,100. Ki=10')
grid on
下图是当Kp=1,Ki分别取为1、10、100时PI控制器的波特图(蓝色是Ki=1,绿色是Ki=10,红色是Ki=100)。

附上实现代码:
Kp=1
Ki=1
PIs1=tf([Kp,Ki],[1,0])
Ki=10
PIs2=tf([Kp,Ki],[1,0])
Ki=100
PIs3=tf([Kp,Ki],[1,0])
figure(2)
bode(PIs1,PIs2,PIs3)
grid on
title('Bode Diagram of PI: Kp=1. Ki=1,10,100')
可以看到,PI控制器对高频信号的增益会较低,而对低频信号会有较大的放大作用。假如使用PI控制器对50Hz及以上(角频率314rad/sec)的正弦波进行跟踪,系统的跟踪特性会较差。而且会把低频噪声放大。
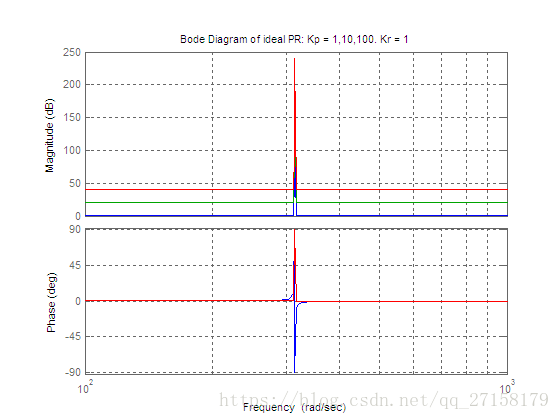
下图是当Kp分别取为1、10、100,Kr=1时理想的PR控制器的波特图(蓝色是Kp=1,绿色是Kp=10,红色是Kp=100)。
附实现代码
Kr=1;
Kp=1;
PR_ideal1 = Kp + tf([Kr,0],[1,0,wo^2])
Kp=10;
PR_ideal2 = Kp + tf([Kr,0],[1,0,wo^2])
Kp=100;
PR_ideal3 = Kp + tf([Kr,0],[1,0,wo^2])
bode(PR_ideal1,PR_ideal2,PR_ideal3)
grid on
title('Bode Diagram of ideal PR: Kp = 1,10,100. Kr = 1')
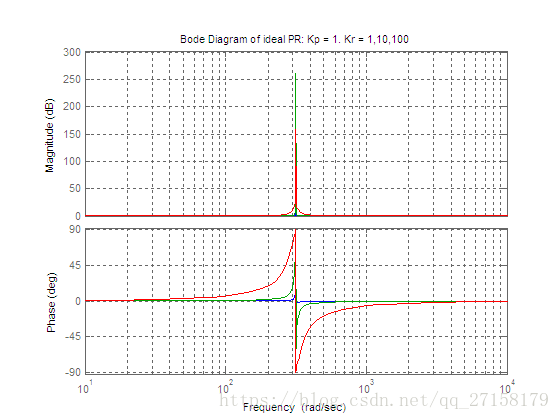
下图是当Kp=1,Kr分别取为1、10、100时理想的PR控制器的波特图(蓝色是Kr=1,绿色是Kr=10,红色是Kr=100)。
附实现代码
Kp=1;
Kr=1;
PR_ideal1 = Kp + tf([Kr,0],[1,0,wo^2])
Kr=10;
PR_ideal2 = Kp + tf([Kr,0],[1,0,wo^2])
Kr=100;
PR_ideal3 = Kp + tf([Kr,0],[1,0,wo^2])
figure(4)
bode(PR_ideal1,PR_ideal2,PR_ideal3)
grid on
title('Bode Diagram of ideal PR: Kp = 1. Kr = 1,10,100')
上面理想PR的波特图,可以看到就算调整PR的参数,波形也没什么大的变化。在实际使用中,可能进行实时调参的。图像变化这么小,跟踪效果也不会好。
接下来看看实际使用的PR控制器的波特图。
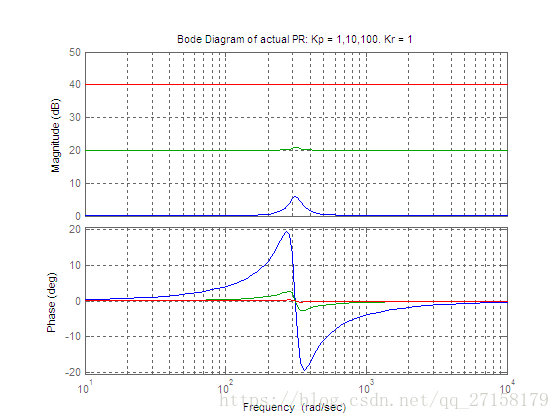
下图是当Kp分别取为1、10、100,Kr=1时实际的PR控制器的波特图(蓝色是Kp=1,绿色是Kp=10,红色是Kp=100)。
附实现代码
Kr=1;
Kp=1;
PR1=Kp+tf([2*Kr*wc,0],[1,2*wc,wo^2])
Kp=10;
PR2=Kp+tf([2*Kr*wc,0],[1,2*wc,wo^2])
Kp=100;
PR3=Kp+tf([2*Kr*wc,0],[1,2*wc,wo^2])
bode(PR1,PR2,PR3)
grid on
title('Bode Diagram of actual PR: Kp = 1,10,100. Kr = 1')
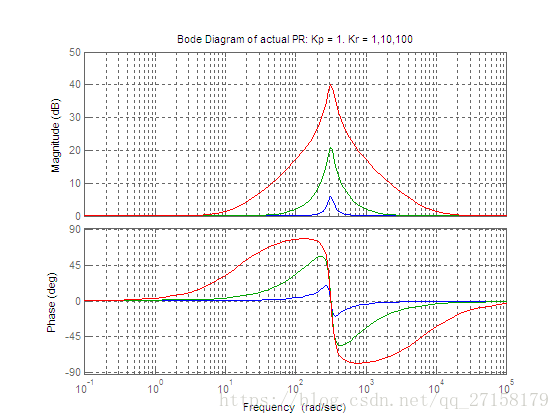
下图是当Kp=1,Kr分别取为1、10、100时实际的PR控制器的波特图(蓝色是Kr=1,绿色是Kr=10,红色是Kr=100)。
附实现代码
Kp=1;
Kr=1;
PR1=Kp+tf([2*Kr*wc,0],[1,2*wc,wo^2])
Kr=10;
PR2=Kp+tf([2*Kr*wc,0],[1,2*wc,wo^2])
Kr=100;
PR3=Kp+tf([2*Kr*wc,0],[1,2*wc,wo^2])
bode(PR1,PR2,PR3)
grid on
title('Bode Diagram of actual PR: Kp = 1. Kr = 1,10,100')
PI和PR的Kp作用类似,都是增大开环增益,增加控制精度。
Ki和Kr作用类似:降低系统稳态误差。
2、离散化预备知识
目的是对PR控制器的传递函数进行离散化。使其可以在数字控制器上编程实现。在这过程之前,要复习相关知识。同时便于检查离散化过程有无错误。
2.1 离散化表达式
传递函数离散化后,函数中消掉了拉普拉斯算子“s”,同时出现了“z”。有一个公式需要认识。

以上公式,转化为单片机或DSP可以执行的命令为:

2.2 离散化方法
离散化方法一览表[来自参考文献1]
| Zero-order hold |
 |
| First-order hold |
 |
| Forward Euler |
 |
| Backward Euler |
 |
| Trapezoid(Tustin) |
 |
| Tustin with pre-warping |
 |
| Zero-pole matching |
 |
| Impulse invariant |
 |
看起来比较简单的方法是Forward Euler、Backward Euler、Trapezoid(Tustin)这三种了。直接把公式代入,用z消掉s就好了。
2.3 离散化练习题
用Trapezoid(Tustin)方法离散化PID控制器。

把代入上式,得到

化简过程略,得到:

代入Kp=1;Ki=2;Kd=3;Ts=1/1000;可得到

在Matlab中验证结果:
Kp=1;Ki=2;Kd=3;Ts=1e-3;
PID=tf([Kd,Kp,Ki],[1,0])
c2d(PID,1e-3,'tustin')
可得到:
Transfer function:
6001 z^2 - 1.2e004 z + 5999
---------------------------
z^2 - 1
Sampling time: 0.001
和计算结果一致。
同时Matlab的c2d()函数总共支持五种离散方法。
SYSD = C2D(SYSC,TS,METHOD) computes a discrete-time model SYSD with
sampling time TS that approximates the continuous-time model SYSC.
The string METHOD selects the discretization method among the following:
'zoh' Zero-order hold on the inputs
'foh' Linear interpolation of inputs
'impulse' Impulse-invariant discretization
'tustin' Bilinear (Tustin) approximation.
'matched' Matched pole-zero method (for SISO systems only).
The default is 'zoh' when METHOD is omitted.
3. 使用Matlab离散PR控制器
Kp=1;
Kr=10;
wc=2*pi*5;
wo=2*pi*50;
PRs=Kp+tf([2*Kr*wc,0],[1,2*wc,wo^2])
PRz = c2d(PRs,1e-3,'tustin')
命令行输出:
Transfer function:
1.297 z^2 - 1.847 z + 0.643
---------------------------
z^2 - 1.847 z + 0.9405
Sampling time: 0.001
可得到,离散化后,数字实现的C语言为:
y_k - 1.847*y_k1 + 0.9405*y_k2 = 1.297*u_k - 1.847*u_k1 +0.643*u_k2;
即
y_k = 1.297*u_k - 1.847*u_k1 +0.643*u_k2 + 1.847*y_k1 - 0.9405*y_k2 ;
4、逆变器仿真模型中使用PR闭环控制器
Matlab/Simulink搭建了模型:
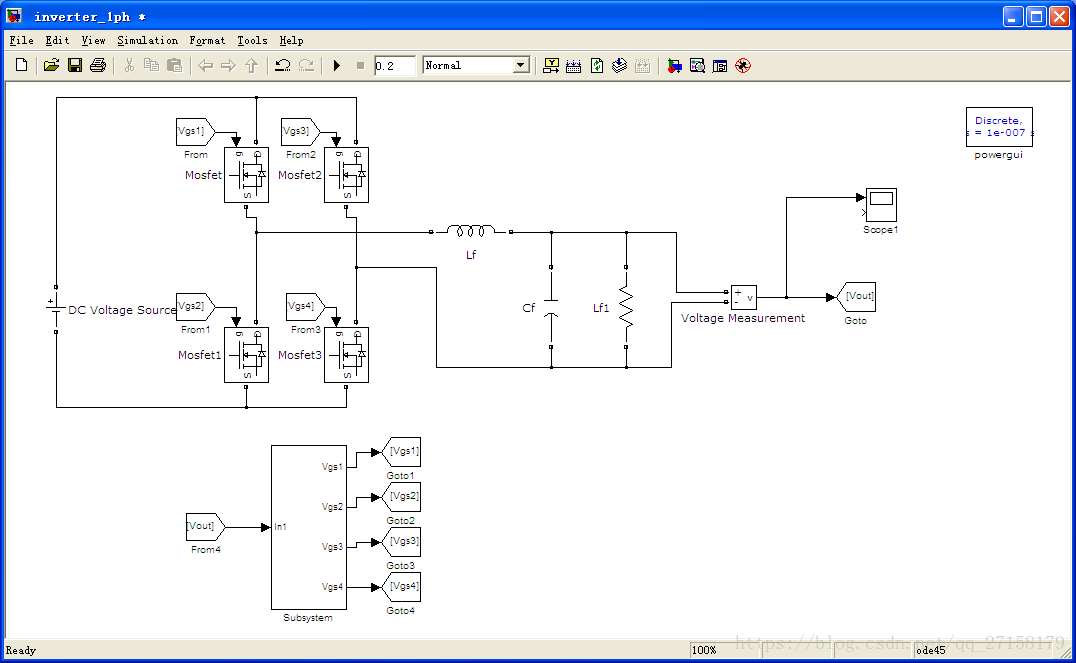
电气主回路中参数:滤波电感Lf=47uH,滤波电容Cf=1uF,负载Lf1=30欧姆。
控制回路:
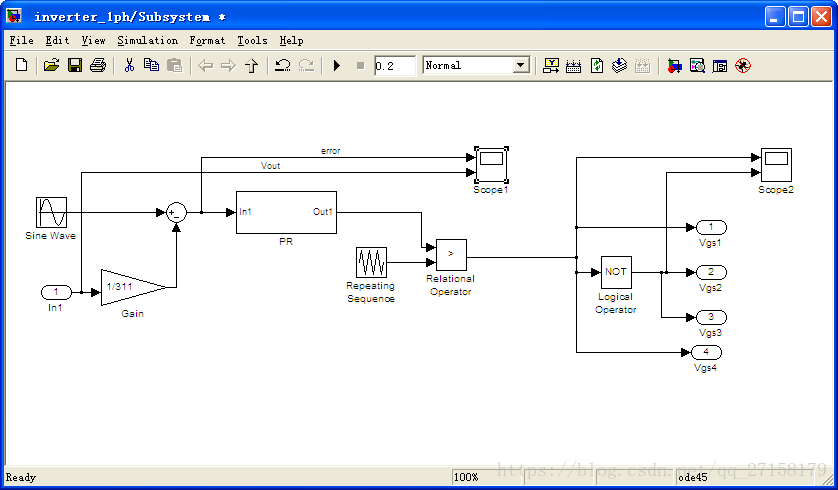
PR控制器实现框图:
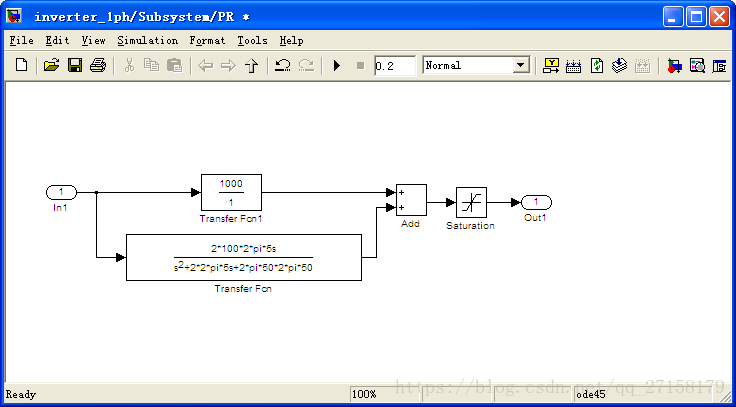
经过参数优化后,Kp=1000,Kr=100;wc=2*pi*5;wo=2*pi*50;

上图中,error = Vref - Vout/311。Vref为频率50Hz、幅值为1的正弦波。Vout是逆变器输出。可以看到闭环系统中误差可降到1mV *311=0.331V之内(1mV为error波形的幅值,311为电压标幺化基准值)。
参考资料1:Effects of Discretization Methods on the Performance of Resonant Controllers, Alcjandro G. Ycpcs, IEEE transactions on Power Electronics
参考资料2:PID控制器的数字实现及C语法讲解
参考资料3:比例谐振控制的一种实现(含代码)
参考资料4:采用比例谐振控制器的逆变器_叶礼清