PID算法简介及实现代码
PID简介
智能车比赛中,用到了PID算法,写下来当一个总结。PID是很经典且应用很广泛的控制算法,依据误差来减少误差。
 PID
PID
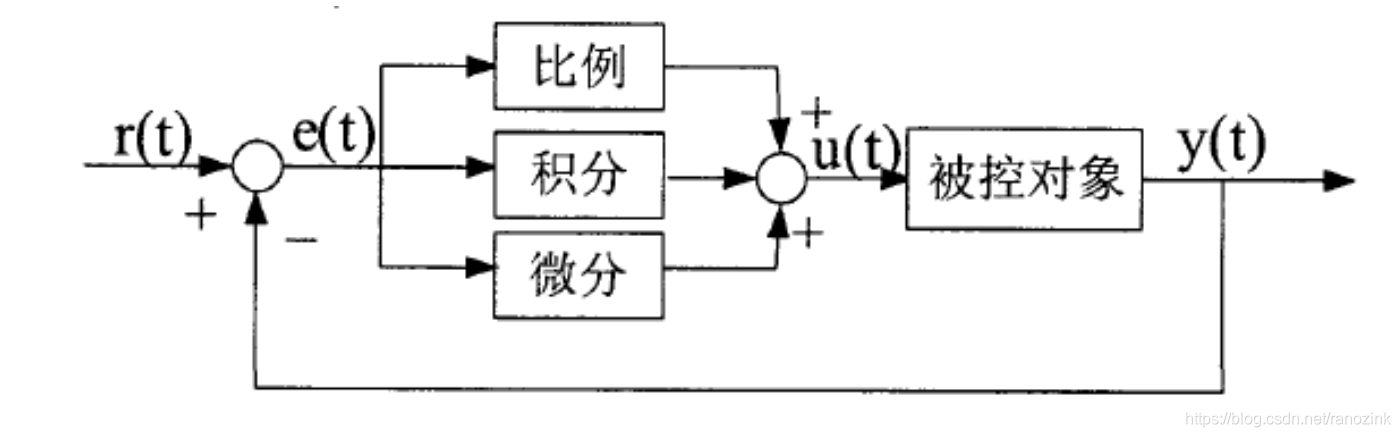
PID分为三部分:
- P 比例。P增大,可以加快系统响应速度,但是不能从根本上消除静态误差,而且P过大,容易超调。
- I 积分 。用求和代替积分。一段时间内误差的累积。但是对于变化很快的系统,积分时间不宜太长,I不宜给的太大,否则会降低系统的稳定。
- D 微分。用增量代替微分。D可以预测偏差,就相当于求了一个加速度,可以做一个预判。但是要注意选择合适的微分时间。
基本的PID算法有两种,位置式PID和增量式PID:
位置式PID:

增量式PID:

位置式PID和增量式PID的区别:
个人经验之谈,对于误差变化很快的系统,选增量式PID比较合适,因为增量式PID只涉及了前后几次的误差,而位置式PID的积分,是一段时间内的误差,如果误差变化很快的话,位置式的PID的I这一项,反倒会引入更大的误差,不如使用增量式PID。
更详细的,可以 看这篇 位置式PID与增量式PID区别浅析
代码实现:
//pid.h
enum pid_mode
{
PID_POSITION = 0,
PID_DELTA
};
typedef struct
{
char mode;//position or delta
float kp;//P
float ki;//I
float kd;//D
float iout_max;
float out_max;
float target;//goal
float now;//now
float out_p;
float out_i;
float out_d;
float out;
float erro[3];
float Dbuff[3];
}pid_param_t;
void pid_init(pid_param_t * pid, char mode, const float PID[3], float iout_max, float out_max);
float pid_Calc(pid_param_t * pid, float now, float target);
//pid.c
#include "pid.h"
#define LimitMax(input,max) \
{ \
if (input > max) \
{ \
input = max; \
} \
if (input < -max) \
{ \
input = -max; \
} \
\
}
void pid_init(pid_param_t * pid ,char mode,const float PID[3],float iout_max,float out_max)
{
pid->mode = mode;
pid->kp = PID[0];
pid->ki = PID[1];
pid->kd = PID[2];
pid->out_max = out_max;
pid->iout_max = iout_max;
pid->out_p = pid->out_i = pid->out_d = 0;
pid->out = pid->last_out = pid->before_out = 0;
pid->Dbuff[0] = pid->Dbuff[1] = pid->Dbuff[2] = 0;
pid->erro[0] = pid->erro[1] = pid->erro[2] = 0;
}
float pid_Calc(pid_param_t * pid ,float now,float target)
{
pid->target = target;
pid->now = now;
pid->erro[1] = pid->erro[0];
pid->erro[2] = pid->erro[1];
pid->erro[0] = pid->target - pid->now;
if (pid->mode = PID_POSITION)
{
pid->Dbuff[0] = pid->erro[0] - pid->erro[1];
pid->out_p = pid->kp*pid->erro[0];
pid->out_i += pid->ki*pid->erro[0];
pid->out_d = pid->kd*pid->Dbuff[0];
LimitMax(pid->out_i, pid->iout_max);
pid->out = pid->out_p + pid->out_i + pid->out_d;
}
else if (pid->mode = PID_DELTA)
{
pid->Dbuff[1] = pid->Dbuff[0];
pid->Dbuff[2] = pid->Dbuff[1];
pid->Dbuff[0] = pid->erro[0] - pid->erro[1];
pid->out_p = pid->kp*pid->Dbuff[0];
pid->out_i= pid->ki*pid->erro[0];
pid->out_d = pid->kd*(pid->Dbuff[0]- pid->kd*pid->Dbuff[1]);
pid->out = pid->out_p + pid->out_i + pid->out_d;
LimitMax(pid->out, pid->out_max);
}
return pid->out;
}