1 聚合方法
1.1 权重求和法 (Weighted Sum Approach)
m
a
x
i
m
i
z
e
g
w
s
(
x
/
λ
)
=
∑
i
=
1
m
λ
i
f
i
(
x
)
s
u
b
j
e
c
t
t
o
x
∈
Ω
maximize \ \ g^{ws}(x/\lambda) = \sum_{i=1}^m \lambda_if_i(x) \\ subject to x \in \Omega
maximize gws(x/λ)=i=1∑mλifi(x)subjecttox∈Ω

权重求和法的意义在于, 我们不需要去考虑多个目标函数值的优化, 而是为每个目标函数根据重要程度分配一个恰当的权重, 也即
∑
i
=
0
m
λ
i
=
1
\sum_{i=0}^m \lambda^i = 1
∑i=0mλi=1 。 然后根据目标函数
f
i
f_i
fi 的重要程度进行不同程度的优化来获取 max/min 的函数值。
1.2 切比雪夫聚合法 (Tchebycheff Approach)
公式
m
i
n
i
m
i
z
e
g
t
e
(
x
∣
λ
,
z
∗
)
=
m
a
x
1
≤
i
≤
m
{
λ
∣
f
i
(
x
)
−
z
i
∗
∣
}
s
.
t
.
x
∈
Ω
minimize \ \ g^{te}(x|\lambda,z^*) = \mathop{max}\limits_{1\le i \le m} \{\lambda |f_i(x)-z^*_i|\} \\ s.t. x\in \Omega
minimize gte(x∣λ,z∗)=1≤i≤mmax{λ∣fi(x)−zi∗∣}s.t.x∈Ω
切比雪夫方法思路在于不断迫使个体接近预定的理想点, 最终到达约束条件
Ω
\Omega
Ω 下的 Pareto 最优解。算法的精髓在于通过聚合函数把多目标优化问题转化为单目标优化。
对于上述公式提出的多目标优化问题, 求最小值, 种群规模为m, 解析如下:
z
∗
=
(
z
1
∗
,
z
2
∗
,
.
.
.
,
z
m
∗
)
z^* = (z_1^*,z_2^*,...,z_m^*)
z∗=(z1∗,z2∗,...,zm∗) 为一系列参考点( 理想点 ) , 该点不一定实际存在, 如上图所示, 该点仅仅为了指出函数优化的方向, 也即理想状态, 用数学语言描述即对任意
i
=
1
,
2
,
.
.
.
,
m
均
有
z
i
∗
≤
m
i
n
{
f
i
(
x
)
∣
x
∈
Ω
}
i=1,2,...,m \ 均有 z_i^* \le min\{f_i(x)|x\in\Omega\}
i=1,2,...,m 均有zi∗≤min{fi(x)∣x∈Ω} 。
λ
∗
=
(
λ
1
,
λ
2
,
.
.
.
,
λ
m
)
\lambda^* = (\lambda^1,\lambda^2,...,\lambda^m)
λ∗=(λ1,λ2,...,λm) 为一系列权重指标, 其中
∑
i
=
0
m
λ
i
=
1
\sum_{i=0}^m \lambda^i = 1
∑i=0mλi=1 。 以下面图为例
w
i
等
价
λ
i
w_i 等价 \lambda_i
wi等价λi ,权重的数量与种群规模相同,种群规模是m,那么权重的数量就是m。每组权重向量将多目标优化问题转化为一个单目标优化问题。m组权重向量就是m个单目标优化问题。
m
a
x
1
≤
i
≤
m
{
λ
∣
f
i
(
x
)
−
z
i
∗
∣
}
\mathop{max}\limits_{1\le i \le m} \{\lambda |f_i(x)-z^*_i|\}
1≤i≤mmax{λ∣fi(x)−zi∗∣} 为所求的目标函数。 以目标函数中的一对值
λ
1
∣
f
1
(
x
)
−
z
1
∗
∣
与
λ
2
∣
f
2
(
x
)
−
z
2
∗
∣
\lambda_1|f_1(x)-z_1^*| \ 与 \ \lambda_2|f_2(x)-z_2^*|
λ1∣f1(x)−z1∗∣ 与 λ2∣f2(x)−z2∗∣ 来说明, 根据需求我们需要求得两者之中的最大值。 但是为什么要求最大值呢? 我们看以下切比雪夫集合方法的表达式
m
i
n
i
m
i
z
e
g
t
e
(
x
∣
λ
,
z
∗
)
=
m
a
x
1
≤
i
≤
m
{
λ
∣
f
i
(
x
)
−
z
i
∗
∣
}
minimize \ \ g^{te}(x|\lambda,z^*) = \mathop{max}\limits_{1\le i \le m} \{\lambda |f_i(x)-z^*_i|\}
minimize gte(x∣λ,z∗)=1≤i≤mmax{λ∣fi(x)−zi∗∣}我们的需求是缩小
g
t
e
(
x
∣
λ
,
z
∗
)
g^{te}(x|\lambda,z^*)
gte(x∣λ,z∗) 的值以期获得约束集上的最小值。 这里我们考虑一个集合
A
=
{
10
,
8
,
7
,
4
,
5
}
A = \{10,8,7,4,5\}
A={10,8,7,4,5} , 我们获取了其中最大值 10 之后对其进行缩小, 来减小与理想值之间的差距 (
λ
1
∣
f
1
(
x
)
−
z
1
∗
∣
\lambda_1|f_1(x)-z_1^*|
λ1∣f1(x)−z1∗∣ 的几何意义也即
f
1
与
Z
1
∗
之
间
的
距
离
f_1 与 Z_1^* 之间的距离
f1与Z1∗之间的距离 ) , 那么 10 在缩小之后顺带着带动了所有 < 10 的元素都进行了缩小。 这里的思想也就等价于不等式证明的思想, 证明函数小于某个确定值, 仅需证明其函数最大值小于该确定值即可。 因此, 如果集合中最大的值都达到了其最小值, 那么其他小于它的值肯定也达到了最小值。对于一个权重向量
λ
\lambda
λ 是如此,每一个权重向量都是按照这个方式求得相应的解。
在切比雪夫聚合方法中, 一个确定点(个体) 移动方向可能是下图的情形。
1.3 边界交叉法 (Boundary Intersection Approach)
公式
m
i
n
i
m
i
z
e
g
b
i
(
x
∣
λ
,
z
∗
)
=
d
s
u
b
j
e
c
t
t
o
z
∗
−
F
(
x
)
=
d
λ
x
∈
Ω
minimize g^{bi}(x|\lambda,z^*)=d \\ subject to z^* - F(x) = d\lambda \ \ x \in \Omega
minimizegbi(x∣λ,z∗)=dsubjecttoz∗−F(x)=dλ x∈Ω
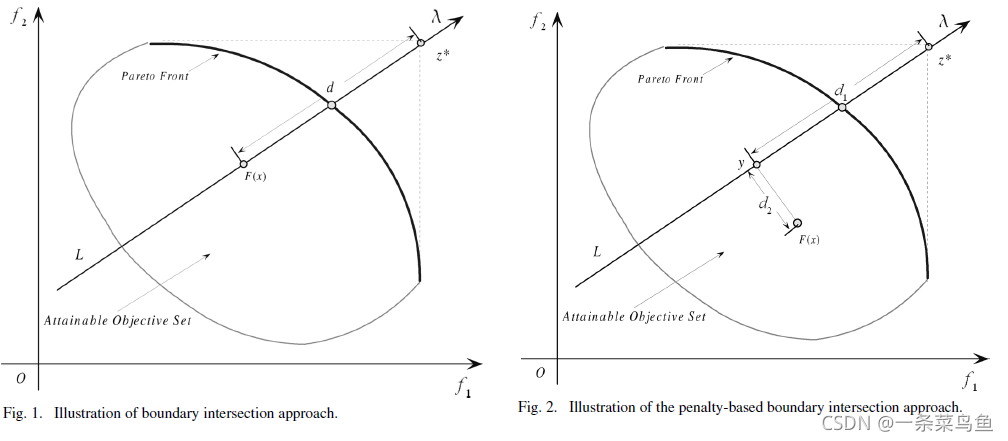
边界交叉法的核心思想在于缩短理想点
z
∗
z^*
z∗ 与 实际点或者说个体
M
M
M 之间的距离。
左图是基础边界交叉法的图示, 右图则是基于惩罚机制的边界交叉法图示。
见名知意, 基于惩罚机制的边界交叉法的精髓在于其加入了惩罚机制。 该惩罚机制在实际点距离理想点越远时惩罚力度越大(实质上也是迫使点更快趋近理想点), 与深度学习中的基于学习的SGD类似, 能够根据不同的实际情况来增大或缩小 LR。
2 算法流程
2.1 解的生成
公式
m
i
n
i
m
i
z
e
g
t
e
(
x
∣
λ
,
z
∗
)
=
m
a
x
1
≤
i
≤
m
{
λ
∣
f
i
(
x
)
−
z
i
∗
∣
}
s
.
t
.
x
∈
Ω
minimize \ \ g^{te}(x|\lambda,z^*) = \mathop{max}\limits_{1\le i \le m} \{\lambda |f_i(x)-z^*_i|\} \\ s.t. x\in \Omega
minimize gte(x∣λ,z∗)=1≤i≤mmax{λ∣fi(x)−zi∗∣}s.t.x∈Ω
算法假设相邻的权重上的解相似,每个权重都有邻居。下面图中红色的点,它的邻居就是附近的四个点,用这四个点去生成新解。生成新解之后,就要替换邻域中的解了。这里面策略很多,可以随机替换邻域中两个解如果这个新解比他们好的话。如此,种群可以更新,最终收敛至近似的Pareto front。
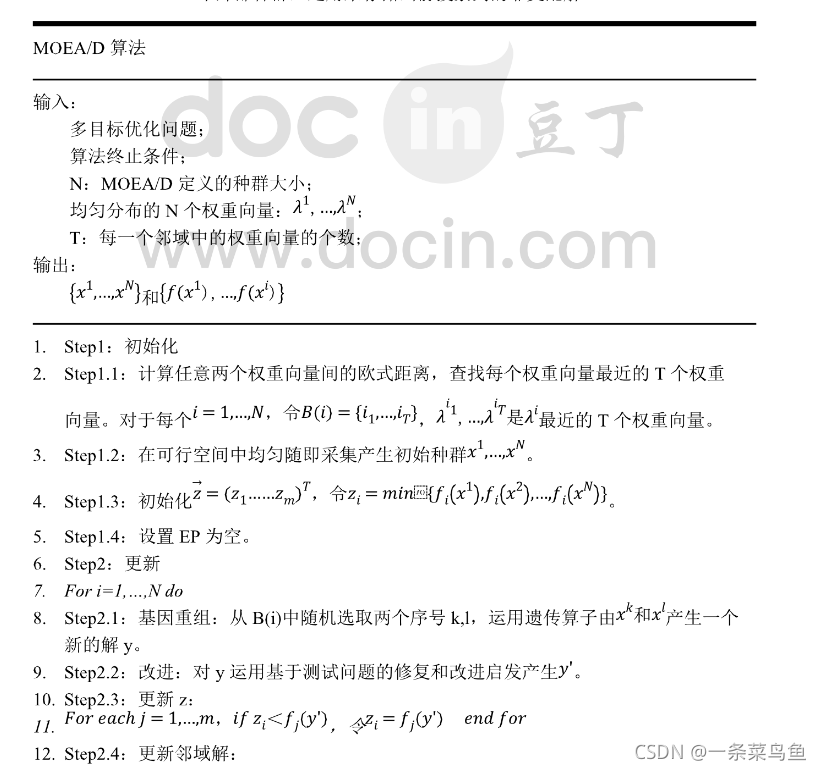
2.2 输入
- 多目标优化问题
- 算法终止条件
- N: MOEA/D 定义的种群大小
- 均匀分布的 N 个权重向量:
λ
1
,
.
.
.
,
λ
n
\lambda_1,...,\lambda_n
λ1,...,λn
- T: 每个邻域中权重向量的个数 (圈的大小)
2.3 初始化
-
Step 1
计算每个权重向量之间的欧式距离 (对于二目标优化就是
(
x
1
,
y
1
)
与
(
x
2
,
y
2
)
(x_1,y_1) 与 (x_2,y_2)
(x1,y1)与(x2,y2) 的距离),对于每个权重向量
λ
i
\lambda^i
λi 得到离它最近的
T
T
T 个权重向量存放于
B
(
i
)
B(i)
B(i)(相邻集合)中。实质上, 如果
λ
i
与
λ
j
\lambda^i 与 \lambda^j
λi与λj 的距离近, 其对应的
g
t
e
(
x
∣
λ
i
,
z
∗
)
与
g
t
e
(
x
∣
λ
j
,
z
∗
)
g^{te}(x|\lambda^i,z^*) 与 g^{te}(x|\lambda^j,z^*)
gte(x∣λi,z∗)与gte(x∣λj,z∗) 也相近 。如下图所示, 由于
∑
i
=
0
m
λ
i
=
1
\sum_{i=0}^m \lambda^i = 1
∑i=0mλi=1 , 因此所有的
λ
\lambda
λ 会落在一条直线上, 故欧式距离越小,表示越相邻;
-
Step 2
随机生成种群
x
1
,
x
2
,
.
.
.
,
x
n
x_1,x_2,...,x_n
x1,x2,...,xn
-
Step 3
初始化
z
∗
=
(
z
1
∗
,
z
2
∗
,
.
.
.
,
z
m
∗
)
z^* = (z_1^*,z_2^*,...,z_m^*)
z∗=(z1∗,z2∗,...,zm∗) ,
z
i
=
m
i
n
{
f
i
(
x
1
)
,
f
i
(
x
2
)
,
.
.
.
,
f
i
(
x
N
)
}
z_i = min\{f_i(x_1),f_i(x_2),...,f_i(x_N)\}
zi=min{fi(x1),fi(x2),...,fi(xN)} 即目标函数上的最小值
-
Step 4
创建外部种群 EP 用于存储精英个体, 也即非支配个体, 初始为空
2.4 种群更新
参数解释
E
P
E
l
i
t
e
p
o
p
u
l
a
t
i
o
n
精
英
种
群
EP \ \ Elite population \ \ 精英种群
EP Elitepopulation 精英种群
B
(
i
)
邻
近
集
合
−
距
离
x
最
近
的
T
个
权
重
向
量
B(i) \ \ 邻近集合 - 距离 x 最近的 T个权重向量
B(i) 邻近集合−距离x最近的T个权重向量
z
∗
理
想
值
z^* \ \ 理想值
z∗ 理想值
F
V
x
(
i
)
F
u
n
c
t
i
o
n
V
a
l
u
e
目
标
函
数
值
FV^{x(i)} \ \ Function Value \ \ 目标函数值
FVx(i) FunctionValue 目标函数值
g
t
e
(
x
(
i
)
∣
λ
,
z
∗
)
理
解
为
到
Z
∗
点
的
距
离
g^{te}(x(i)|\lambda,z^*) \ \ 理解为到 Z^* 点的距离
gte(x(i)∣λ,z∗) 理解为到Z∗点的距离
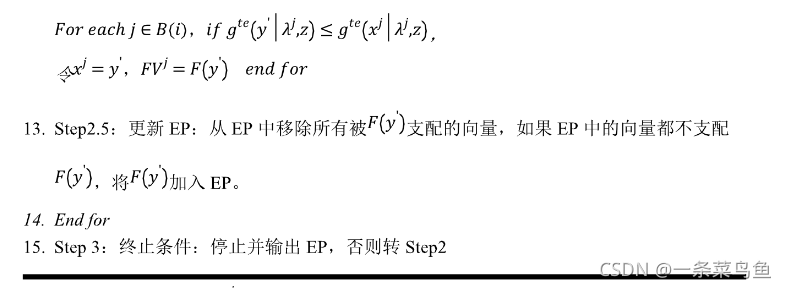
算法步骤
对每个编号为 i 个体执行以下操作
-
Step 1
从邻近集合
B
(
i
)
B(i)
B(i) 中随机选取序号
k
,
l
k,l
k,l 利用基因交叉生成新个体
y
y
y
-
Step 2
对生成的新解(个体)进行修复和改进产生 修复后的解
y
′
y^{\prime}
y′
notes: 修复的意义在于有时生成的解并不符合约束条件, 这时就需要执行修复函数进行修复,使其符合约束
-
Step 3
更新理想值
z
∗
z^*
z∗ , 判断新生成的
y
′
y^{\prime}
y′ 是否优于
z
∗
z^*
z∗, 优于则替换
-
Step 4
更新邻近集合
B
(
i
)
B(i)
B(i) , 如果领域中解
g
t
e
(
x
(
i
)
∣
λ
,
z
∗
)
g^{te}(x(i)|\lambda,z^*)
gte(x(i)∣λ,z∗) 小于
g
t
e
(
y
′
∣
λ
,
z
∗
)
g^{te}(y^{\prime}|\lambda,z^*)
gte(y′∣λ,z∗) , 则更新解对应的函数值
F
V
x
(
i
)
=
F
V
y
′
,
x
(
i
)
=
y
′
FV^{x(i)} = FV^{y^{\prime}} , x(i) = y^{\prime}
FVx(i)=FVy′,x(i)=y′
-
Step 5
更新精英种群
E
P
EP
EP, 从
E
P
EP
EP 中移除所有被
y
′
y^{\prime}
y′ 支配的解, 如果不存在则将
y
′
y^{\prime}
y′ 加入
E
P
EP
EP 集
-
终止条件 是否达到迭代次数, 否则继续执行更新操作
2.5 算法框架
2.6 动画演示
动画制作比较简陋, 但大致的逻辑是对的, 可以参考, 后面有时间再做修改, 请不要做丑拒的小盆友~
更新后的 GIF 演示
附一个讲的很好的知乎回答 respect link.