对于启发式智能优化算法来说, 初始迭代点的好坏往 往影响着收敛的速度与精度
า
า
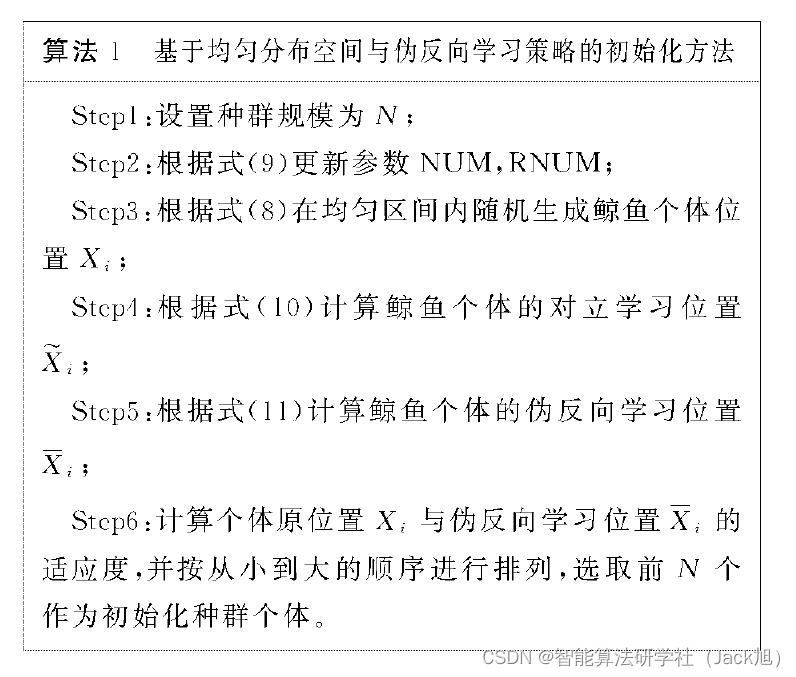
า ר 。原始 WOA算法在初始 化种群个体时使用了随机方法, 使用这种随机方法求解一 个多峰函数时, 若生成的初始种群相对集中在某个区域或 者分散在离最优点较远的峰, 则通过算法进行计算, 很可 能得到局部最优解。因此, 在初始点的选择上, 应尽可能 分布在不同维数的各个位置, 最大程度地提取求解函数中 的信息, 保障初始点的多样性。基于以上考虑, 结合对立 学习策略, 提出了一种均匀分布空间的种群个体随机方 法, 尽可能地将初始点均匀分布在可行域的空间里。具体 方法如下: 令求解函数可行域中, 每个维数的上确界集合为 ub
=
[
u
b
1
,
u
b
2
,
⋯
,
u
b
d
]
=\left[u b_{1}, u b_{2}, \cdots, u b_{d}\right]
=[ub1,ub2,⋯,ubd], 下确界集合为
l
b
=
[
l
b
1
,
l
b
2
,
⋯
\mathrm{lb}=\left[\mathrm{lb}_{1}, \mathrm{lb}_{2}, \cdots\right.
lb=[lb1,lb2,⋯,
1
b
d
]
\left.1 \mathrm{~b}_{d}\right]
1bd], 则根据均匀分布空间初始化种群的方法, 第
i
i
i 只鯨 鱼的第
j
j
j 维的位置初始化公式如下所示:
X
i
′
=
(
R
N
U
M
i
−
1
)
×
(
u
b
j
−
1
b
j
)
N
+
rand
(
0
,
u
b
j
−
1
b
j
N
)
(8)
X_{i}^{\prime}=\left(\mathrm{RNUM}_{i}-1\right) \times \frac{\left(\mathrm{ub}_{j}-1 \mathrm{~b}_{j}\right)}{N}+\operatorname{rand}\left(0, \frac{\mathrm{ub}_{j}-1 \mathrm{~b}_{j}}{N}\right) \tag{8}
Xi′=(RNUMi−1)×N(ubj−1bj)+rand(0,Nubj−1bj)(8)
R
N
U
M
=
r
a
n
d
p
e
r
m
(
N
U
M
)
(9)
RNUM =randperm(NUM) \tag{9}
RNUM=randperm(NUM)(9)
其中,
rand
(
a
,
b
)
\operatorname{rand}(a, b)
rand(a,b) 表示生成
a
a
a 到
b
b
b 之间的随机数,
N
U
M
=
\mathrm{NUM}=
NUM=
[
N
U
M
1
,
N
U
M
2
,
⋯
,
N
U
M
N
]
\left[\mathrm{NUM}_{1}, \mathrm{NUM}_{2}, \cdots, \mathrm{NUM}_{N}\right]
[NUM1,NUM2,⋯,NUMN] 表示从 1 到种群个体总数
N
N
N 的整数组成的数组, 其中
N
U
M
i
=
i
\mathrm{NUM}_{i}=i
NUMi=i, randpcrm(NUM) 表 示将数组 NUM 中元萦的顺序随机打乱, 进行重新排列, 重新排列后的数组记为
R
N
U
M
=
[
R
N
U
M
1
,
R
N
U
M
N
2
,
⋯
\mathrm{RNUM}=\left[\mathrm{RNUM}_{1}, \mathrm{RNUM} \mathrm{N}_{2}, \cdots\right.
RNUM=[RNUM1,RNUMN2,⋯,
R
N
U
M
N
]
\left.\mathrm{RNUM}_{N}\right]
RNUMN], 数组 RNUM 依然是由 1 到
N
N
N 的整数组成。 利用这样的方式, 能够将每个维数的可行域等分成
N
N
N 个 小区间, 每只鲸鱼个体在随机不重复的在一个小区间上随 机取点, 这样使得初始点在每个维数上的取点更加均匀, 很大程度上减少算法得到局部最优解的概率。 对立学习策略 (opposition-based learning, OBL )
−
177
{ }^{-177}
−177 是 近年来智能算法领域的一种新技术, 在 PSO 算法等智能 算法中成功应用后, 龙文等 已将该方法用于
W
O
∧
W O \wedge
WO∧ 算 法, 使得初始点的质量有了明显的提高, 但该方案在作用 域对称时, 对立学习的效果会有所淢弱。因此为了提高对 立学习的能力, 黄元春等在改进标准对立学习策略后, 提 出了伪反向学习策略的种群初始化方案
−
187
{ }^{-187}
−187, 具体步叕如 T: 在利用均匀分布空间的方法随机得到了第
i
i
i 只鲸鱼 在可行域内的位置
X
i
=
(
X
i
1
,
X
i
2
,
⋯
,
X
i
d
)
,
i
=
1
,
2
,
⋯
X_{i}=\left(X_{i}^{1}, X_{i}^{2}, \cdots, X_{i}^{d}\right), i=1,2, \cdots
Xi=(Xi1,Xi2,⋯,Xid),i=1,2,⋯,
N
N
N, 其中
d
d
d 为维数, 则第
i
i
i 只鲸鱼伪反向个体
X
ˉ
i
=
(
X
ˉ
i
⊤
\bar{X}_{i}=\left(\bar{X}_{i}^{\top}\right.
Xˉi=(Xˉi⊤,
X
ˉ
i
2
,
⋯
,
X
ˉ
i
d
\bar{X}_{i}^{2}, \cdots, \bar{X}_{i}^{d}
Xˉi2,⋯,Xˉid ) 的计算公式如下:
X
~
i
j
=
u
b
+
l
b
−
X
i
j
,
j
=
1
,
2
,
⋯
,
d
(10)
\tilde{X}_{i}^{j}=u b+l b-X_{i}^{j}, \quad j=1,2, \cdots, d \tag{10}
X~ij=ub+lb−Xij,j=1,2,⋯,d(10)
X
ˉ
i
j
=
{
rand
(
M
j
,
X
~
i
j
)
,
X
i
j
≤
M
j
rand
(
X
~
i
j
,
M
j
)
,
X
i
j
>
M
j
(11)
\begin{gathered} \bar{X}_{i}^{j}=\left\{\begin{array}{l} \operatorname{rand}\left(M_{j}, \widetilde{X}_{i}^{j}\right), X_{i}^{j} \leq M_{j} \\ \operatorname{rand}\left(\tilde{X}_{i}^{j}, M_{j}\right), X_{i}^{j}>M_{j} \end{array}\right. \end{gathered}\tag{11}
Xˉij=⎩⎨⎧rand(Mj,Xij),Xij≤Mjrand(X~ij,Mj),Xij>Mj(11) 其中,
M
j
=
0.5
(
u
b
−
l
b
)
,
rand
(
X
~
i
j
,
M
j
)
M_{j}=0.5(\mathrm{ub}-\mathrm{lb}), \operatorname{rand}\left(\tilde{X}_{i}^{j}, M_{j}\right)
Mj=0.5(ub−lb),rand(X~ij,Mj) 表示
(
X
~
i
j
,
M
j
)
\left(\widetilde{X}_{i}^{j}, M_{j}\right)
(Xij,Mj) 内 的随机数。由均匀分布空间与伪反向学习策略初始化种群算法步聚如下:
2.2 基于正态变异的择优选择
正态变异算子 作为一种常见的智能算法干扰方 式, 在迭代前期会加快捜寻最优解的速度, 在迭代后期, 种 群的个体不断向最优个体集中, 导致种群多样性的减少, 利用正态变异算子可以丰富种群的多样性。通过该变异 方案与搜索包围机制, 螺旋更新位置结合, 可以在提高局 部搜索能力的同时,提高全局搜索范围,极大地提高搜寻 到最优解的概率和精度。 在之前的改进中, 钟明辉 等 将正态变异算子应用 于每次迭代后的最优个体, 本算法中的正态变异算子将推 广到对每个个体, 并且将变异后的个体与原个体的适应度 进行比较, 并且择优选择适应度小的个体代替当前个体进 人下一次迭代。再进过分析, 择优选择的方法会减弱全局 捜索能力, 故在全局搜寻阶段, 直接选择变异后的个体作 为当前个体, 不进行择优选择, 故第
i
i
i 只鲸鱼的第
j
j
j 维的 正态变异计算公式如下:
X
ˉ
i
j
=
X
i
j
+
N
(
0
,
1
)
⋅
X
i
j
(12)
\bar{X}_{i}^{j}=X_{i}^{j}+N(0,1) \cdot X_{i}^{j} \tag{12}
Xˉij=Xij+N(0,1)⋅Xij(12) 选择变异前后的最优个体作为进人下一次迭代的个体, 其 计算公式如下:
X
i
+
1
=
{
f
−
1
(
min
(
f
(
X
i
)
,
f
(
X
ˉ
2
)
)
)
,
f
(
X
i
(
t
)
)
−
f
(
X
i
(
t
−
s
)
)
≠
0
X
ˉ
i
,
f
(
X
i
(
t
)
)
−
f
(
X
i
(
t
−
s
)
)
=
0
(13)
X_{i+1}=\left\{\begin{array}{c} f^{-1}\left(\min \left(f\left(X_{i}\right), f\left(\bar{X}_{2}\right)\right)\right), \\ f\left(X_{i}(t)\right)-f\left(X_{i}(t-s)\right) \neq 0 \\ \bar{X}_{i}, \quad f\left(X_{i}(t)\right)-f\left(X_{i}(t-s)\right)=0 \end{array}\right. \tag{13}
Xi+1=⎩⎨⎧f−1(min(f(Xi),f(Xˉ2))),f(Xi(t))−f(Xi(t−s))=0Xˉi,f(Xi(t))−f(Xi(t−s))=0(13) 其中,
N
(
0
,
1
)
N(0,1)
N(0,1) 表示均值为 0 , 方差为 1 的标准正态分布,
f
(
X
)
f(X)
f(X) 表示个体
X
X
X 的适应度,
f
−
1
(
min
(
X
,
Y
)
)
f^{-1}(\min (X, Y))
f−1(min(X,Y)) 表示选择 适应度最小的
X
X
X 或
Y
,
s
Y, s
Y,s 表示阈值, 阈值的作用是为了检 验算法是否能够继续提高局部捜索的精度。
X
i
(
t
)
X_{i}(t)
Xi(t) 䘚示当 前个体第
t
\mathrm{t}
t 次迭代后的位置, 若
f
(
X
i
(
t
)
)
−
f
(
X
i
(
t
−
s
)
)
f\left(X_{i}(t)\right)-f\left(X_{i}(t-s)\right)
f(Xi(t))−f(Xi(t−s))
≠
0
\neq 0
=0, 表示算法依然在有效的搜寻最优点以及提高局部搜 索的精度; 否则,说明算法在该局部的精度可能达到当前 算法方案的极限, 需要提高局部搜索和全局搜索能力。阈 值的取值林当重要, 若阈值太大, 则订算达到算法的极限 精度时,需要经过
s
s
s 次迭代后, 才能检测到计算达到该精 度。
2.3 基于正弦函数的螺旋更新位置
在
W
O
∧
W O \wedge
WO∧ 算法中,螺旋更新位置是一种不断靠近当前 最优个体, 并且在最优个体附近进行捜索的方法。若陷人 局部最优解, 仅仅通过正态变异算子进行干扰很难跳出局 部最优解, 相对于
W
∧
∧
\mathrm{W} \wedge \wedge
W∧∧ 算法的收缩包围机制, 根据
∣
A
∣
|A|
∣A∣ 值可以向最优点进行局部搜索, 或者向随机点进行全局搜 索。根据上述思路, 吴泽忠等提出了一种基于正弦函数螺 旋更新位置的方案
−
137
{ }^{-137}
−137, 这种方法使得最优点可以向当前 迭代点进行包围搜索, 加强其全局搜索能力, 并且正弦函 数也能提高局部搜索的精度, 但是减弱了前期的收敛速 度。结合以上方案, 在保证收敛速度的前提下, 希望能在 局部搜索时对精度有更好的探索, 则改进的基于正弦函数 的螺旋更新位置计算公式为:
X
i
j
(
t
)
=
{
D
˙
′
e
b
l
cos
(
2
π
l
)
+
X
∗
(
t
)
,
f
(
X
∗
(
t
)
)
−
f
(
X
∗
(
t
−
s
)
)
≠
0
D
˙
′
e
b
l
cos
(
2
π
l
)
+
X
i
j
(
t
)
+
sin
(
X
i
j
(
t
)
)
f
(
X
∗
(
t
)
)
−
f
(
X
∗
(
t
−
s
)
)
=
0
(14)
X_{i}^{j}(t)=\left\{\begin{array}{r} \dot{D}^{\prime} e^{b l} \cos (2 \pi l)+X^{*}(t), \\ f\left(X^{*}(t)\right)-f\left(X^{*}(t-s)\right) \neq 0 \\ \dot{D}^{\prime} e^{b l} \cos (2 \pi l)+X_{i}^{j}(t)+\sin \left(X_{i}^{j}(t)\right) \\ f\left(X^{*}(t)\right)-f\left(X^{*}(t-s)\right)=0 \end{array}\right. \tag{14}
Xij(t)=⎩⎨⎧D˙′eblcos(2πl)+X∗(t),f(X∗(t))−f(X∗(t−s))=0D˙′eblcos(2πl)+Xij(t)+sin(Xij(t))f(X∗(t))−f(X∗(t−s))=0(14) 其中,
D
˙
′
=
∣
X
i
(
t
)
−
X
∗
(
t
)
∣
\dot{D}^{\prime}=\left|X_{i}(t)-X^{*}(t)\right|
D˙′=∣Xi(t)−X∗(t)∣ 表示第
i
i
i 条鲸鱼到当前最优 个体的直线距离。
s
s
s 表示阈值, 其数值与公式(13)相同。 当算法依然在有效地提高局部搜索的精度时, 利用基本 woa算法的螺旋更新位置进行搜索; 当在该局部的精度 可能达到当前算法方案的极限时, 利用改进的基于正弦函 数的螺旋更新位置进行搜索。
2.4基于正弦函数的螺旋更新位置
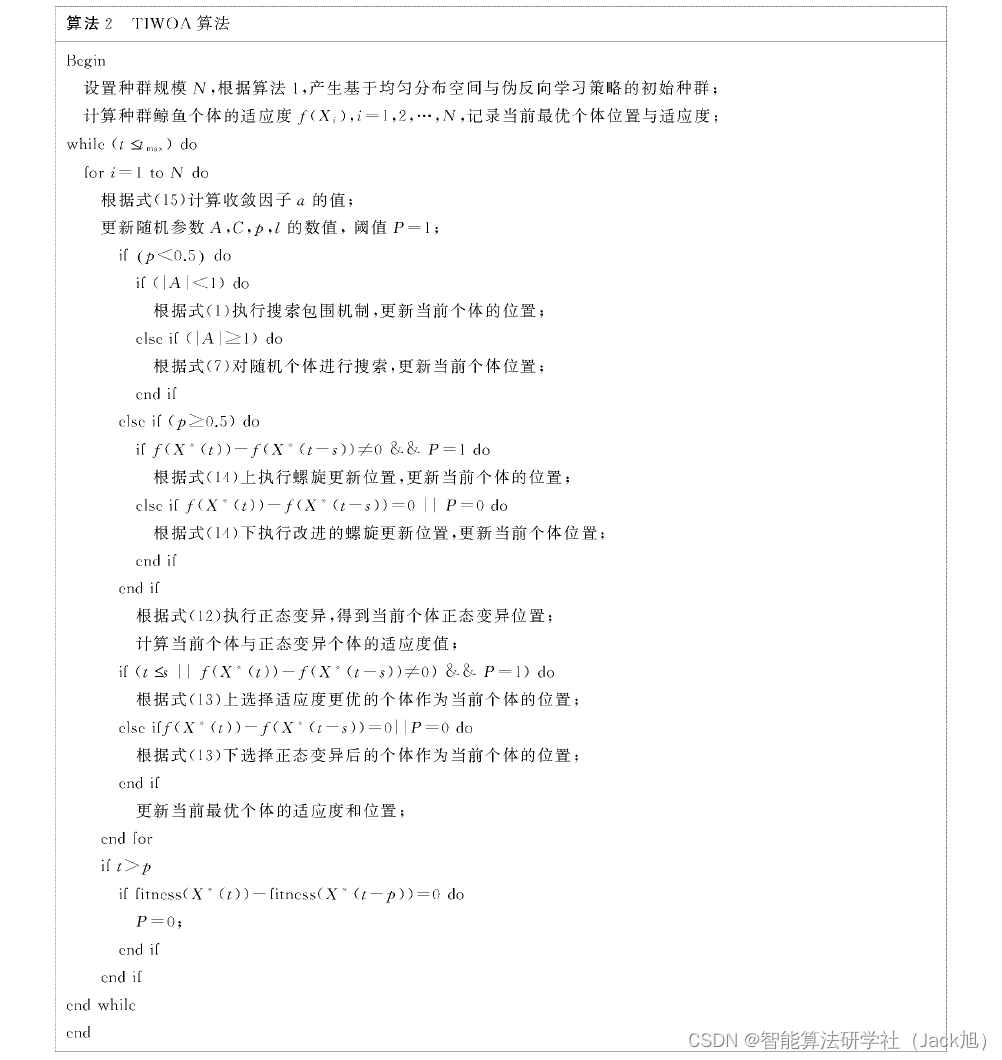
本文提出的
T
I
W
O
Λ
\mathrm{TIWO \Lambda}
TIWOΛ 算法, 通过正态变异算子, 基于 正弦函数的螺旋更新位置两种方案, 提高了后期的局部搜 索能力与全㟃搜索能力。通过实验发现由于前期迭代收 敛较快, 导致了随机搜索方法 (式 (7))更难得到适应度更 优的个体, 所以在前期迭代应使收敛因子
a
a
a 大于 1 , 并且 快速减少到 1 以下, 故在 TIWOA算法中, 设计了一种收 敛因子
a
a
a 非线性从 2 减少到
0.5
,
a
0.5, a
0.5,a 减小的速度先快后 慢, 这样的设计使得前期能进行全局搜索的同时, 加快局 部捜索的速度,得到改进的非线性收敛因子公式为:
a
=
{
(
t
−
1
T
−
1
)
2
+
1
,
1
≤
t
≤
T
1
2
(
t
−
T
−
1
t
max
−
T
−
1
)
2
+
0.5
,
T
<
t
≤
t
max
(15)
a= \begin{cases}\left(\frac{t-1}{T-1}\right)^{2}+1, & 1 \leq t \leq T \\ \frac{1}{2}\left(\frac{t-T-1}{t_{\max }-T-1}\right)^{2}+0.5, & T<t \leq t_{\max } \end{cases}\tag{15}
a=⎩⎨⎧(T−1t−1)2+1,21(tmax−T−1t−T−1)2+0.5,1≤t≤TT<t≤tmax(15)
T
=
f
l
o
o
r
(
t
max
/
50
)
(16)
T=f l o o r\left(t_{\max } / 50\right) \tag{16}
T=floor(tmax/50)(16) 其中, floor
(
x
)
(x)
(x) 表示对
x
x
x 向下取整, 即不大于
x
x
x 的整数。 这里的
T
T
T 值为收敛因子
a
a
a 的分界线,当迭代次数小于
T
T
T 时, 收敛因子
a
>
1
a>1
a>1; 当迭代次数大于
T
T
T 时, 收敛因子
a
<
a<
a< 1.
2.5 引入阈值判断函数是否达到局部最优解
TIWOA 算法利用阈值
p
p
p 来判断算法是否达到了局部最优 解, 判断的方式如下:
P
=
{
1
,
f
(
X
∗
(
t
)
)
−
f
(
X
∗
(
t
−
p
)
)
≠
0
0
,
f
(
X
∗
(
t
)
)
−
f
(
X
∗
(
t
−
p
)
)
=
0
(17)
P= \begin{cases}1, & f\left(X^{*}(t)\right)-f\left(X^{*}(t-p)\right) \neq 0 \\ 0, & f\left(X^{*}(t)\right)-f\left(X^{*}(t-p)\right)=0\end{cases} \tag{17}
P={1,0,f(X∗(t))−f(X∗(t−p))=0f(X∗(t))−f(X∗(t−p))=0(17) 其中,
P
=
1
P=1
P=1 时,算法根据式 (13)、式 (11)的判断条件来执 行对应的等式, 若
P
=
0
P=0
P=0 时, 式 (13)、式 (11) 的判断条件强 制失效, 并强行执行情况(2)的方案。这样的改进能够更 好地调整算法方案, 增加迭代速度与求解精度。