项目地址
https://github.com/CMU-Perceptual-Computing-Lab/openpose
环境
系统:ubuntu20.04
cuda:11.2
GPU:3090 * 2
Driver Version:460.84
opencv3
opencv-python:4.5.4.60
无anaconda3,bashrc里面也要全部卸载了
准备
1.安装Cmake-gui
sudo apt-get install cmake
sudo apt-get install cmake-qt-gui
2.下载项目
git clone https://github.com/CMU-Perceptual-Computing-Lab/openpose.git
#进入项目
cd openpose
开始编译
#此时已经在openpose目录下了
mkdir build
cd build
cmake-gui ..
此时的界面是这样的

注意sourcecode和buildcode路径,有的时候会不准
点击configure
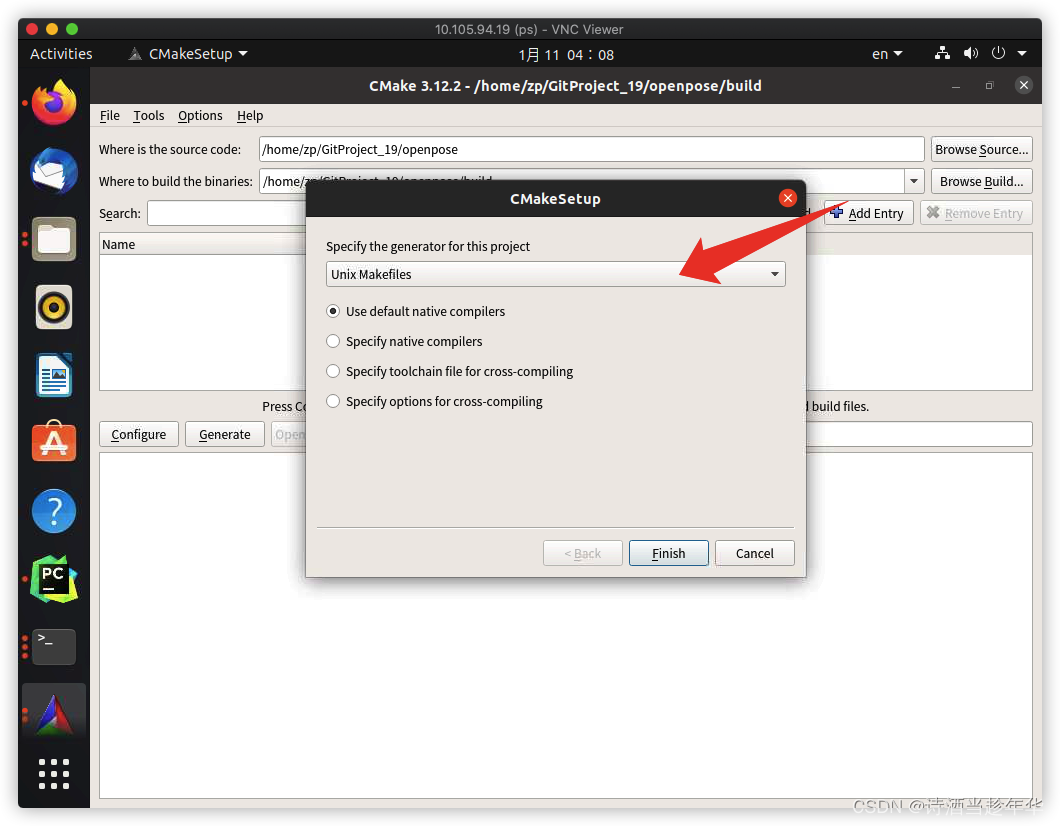
选unix makefile,finish。

这一步也会自动下载一些模型,等待完成。

我用的是python_api所以我要勾选上BUILD_PYTHON选项

由于默认并不知道你的python解释器在哪里所以需要手动进行设置。
在Add Entry里面新加两个
PYTHON_EXECUTABLE /usr/bin/python3
PYTHON_LIBRARY /usr/lib/x86_64-linux-gnu/libpython3.8.so



点击generate

此时,关掉cmake-gui。
你新建的build文件里应该是这样

#此时在 /your path/openpose/build/路径下进行编译
make all -j $nproc
#make -j`nproc` 弃用

进入漫长的等待。让我们一起祈祷编译成功。

看到这个界面说明大公告成。
你的build文件夹现在应该变成这样

让我们实验一下,这里面已经有了官方提供实验的例子。
案例代码路径在/your path/openpose/build/examples/tutorial_api_python/

运行成功!!接下来可以进行你的姿态识别了。