测试第三课,ESP32-C3的串口通信测试
老样子,使用Enocean无线模块和ESP32-C3进行串口通信。
前言
接下来的ESP32-C3 功能测试都是基于自己设计的开发板:
自己画一块ESP32-C3 的开发板(第一次使用立创EDA)(PCB到手)
开发环境是乐鑫官方的 ESP-IDF, 基于VScode插件搭建好的:
ESP32-C3 VScode开发环境搭建(基于乐鑫官方ESP-IDF——Windows和Ubuntu双环境)
1、UART示例测试
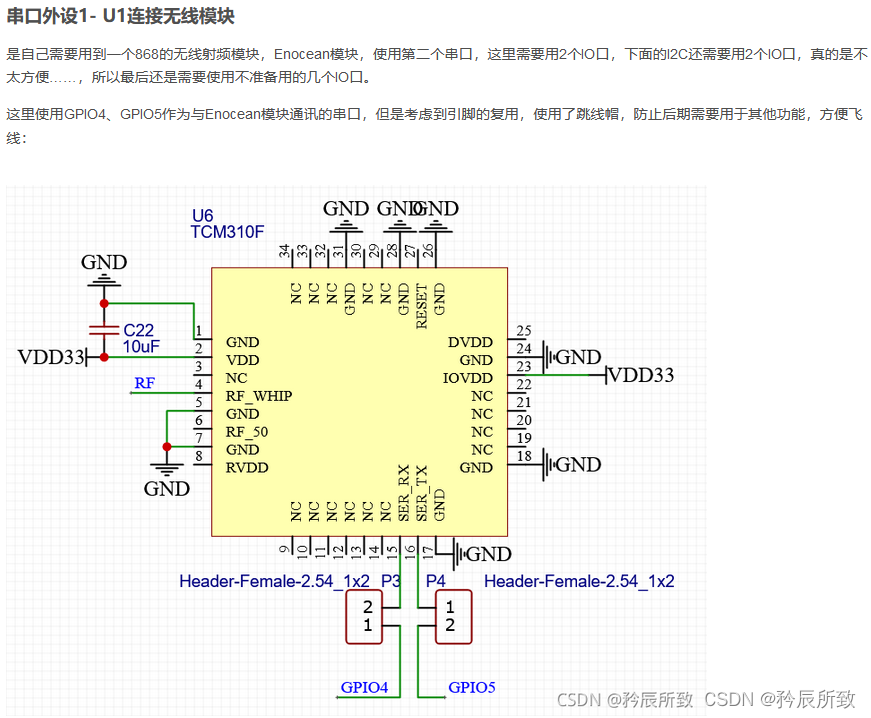
在开发板上面,我们使用了串口0烧录,串口1连接 Enocean 无线通讯模块,所以我们使用UART1测试,引脚为GPIO4、GPIO5:
在做UART测试之前,还是先得看一下官方的介绍,因为UART的示例比较多:
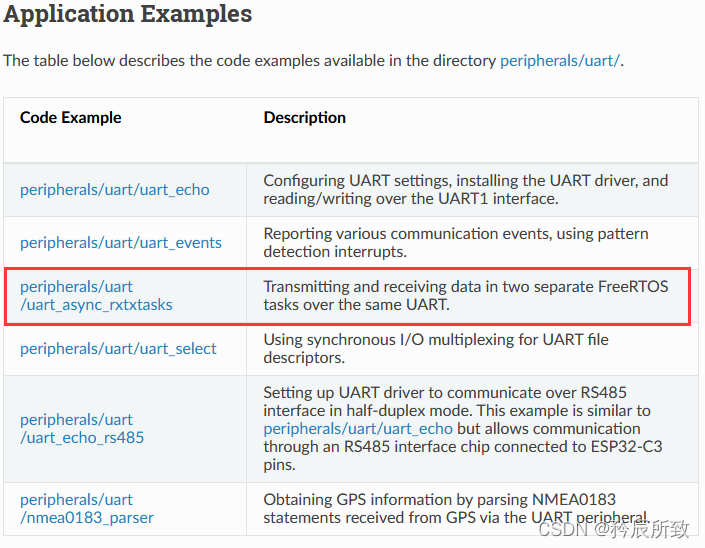
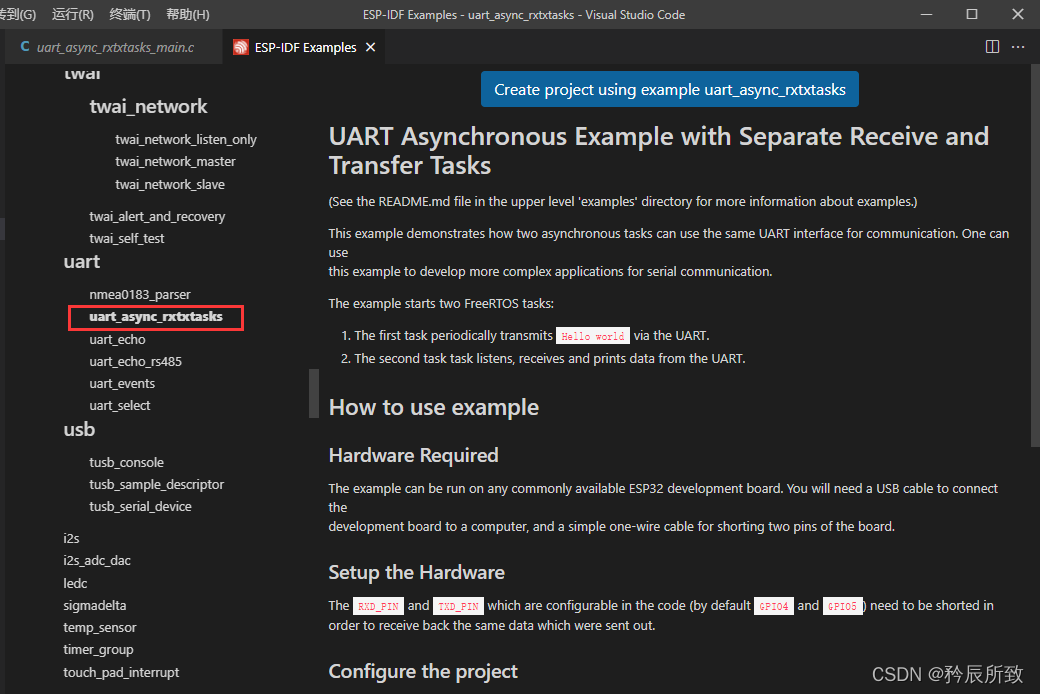
通过官方的示例说明,我们选择带串口收发的例子uart_async_rxtxtasks:
1.1 UART 基础测试
根据上面选择的官方的示例新建的工程,是有收也有发。
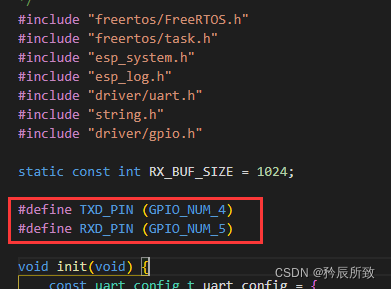
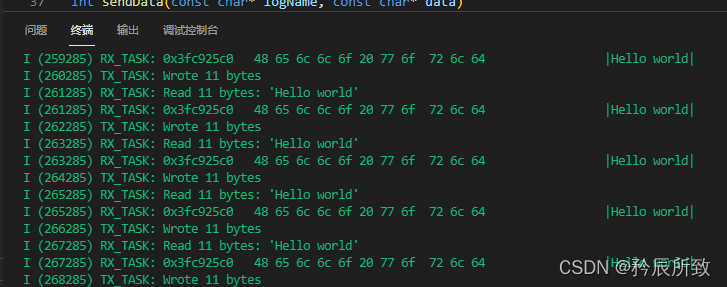
因为这里是基础测试,需要做的只是把程序中定义的两个引脚通过飞线短接起来,便可以观察到示例的现象:
然后工程直接编译烧录,就可以,效果如下:
1.2 与Enocean无线模块串口通信测试
上面的例子只是串口自己接受发送的简单示例,在实际应用中通常是和其他的传感器,模块进行通信,数据交互,那么这里我就使用自己常用的 Enocean 无线模块,来做一次测试,首先当然得对示例代码进行一定的修改。
在开发板上只需要把预留好的跳帽,连接好即可。
涉及到串口的使用,所以建议在看这个例子前面对 下面 ESP32-C3 UART 相关知识先了解一下。
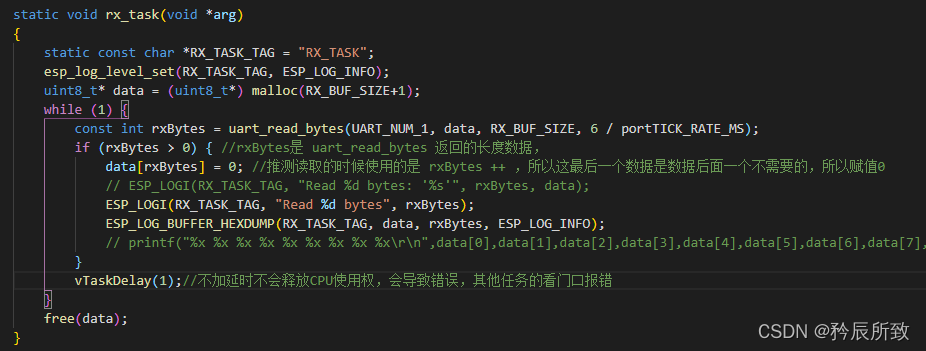
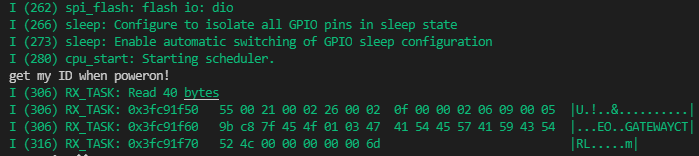
先测试接收,把发送任务去掉,接收函数稍微修改一下:
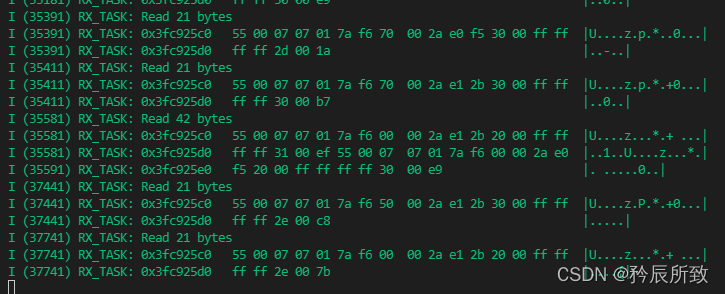
测试结果如下:
(一个无线开关的报文 21 bytes,预留的读取时间为 6ms ,即便这样,也可能在 6ms 内读取到了2个开关的报文,但是不会有错误,这个后期在数据处理的时候需要注意一下)
然后继续测试一下给 无线模块发送消息,对发送任务稍作修改:
接收函数不变,测试结果如下:
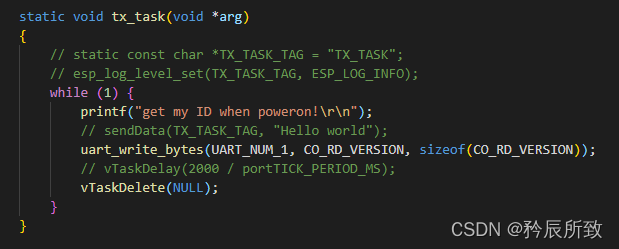
最后还是简单写一个解析函数,测试目的,就没有管代码规范了,就是上电把 ID 读出来,先来看一下效果,下面再放一下测试代码:
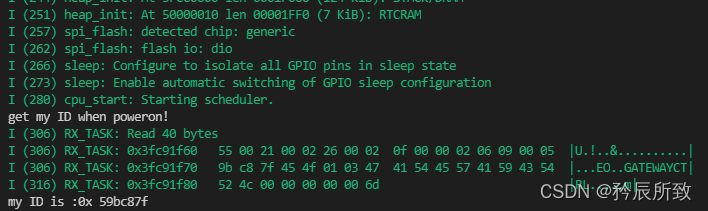
上述示例把 Enocean 模块的ID 读取出来,做到这一步,基本上 ESP32 -C3 和 Enocean 的通信没什么大问题了,如果需要想 在 STM32上面那样有完整的驱动,还是得一点一点的打磨移植一下,后续应该会有机会使用 ESP32 -C3 做些项目,到时候会花时间完善一下驱动。
下面把最后测试的示例代码放上(代码是以测试为目的,没有把读取ID的部分代码写成函数,有点不太规范):
/* UART asynchronous example, that uses separate RX and TX tasks
This example code is in the Public Domain (or CC0 licensed, at your option.)
Unless required by applicable law or agreed to in writing, this
software is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR
CONDITIONS OF ANY KIND, either express or implied.
*/
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_system.h"
#include "esp_log.h"
#include "driver/uart.h"
#include "string.h"
#include "driver/gpio.h"
#include "Datadef.h"
#define proccrc8(u8CRC, u8Data) (u8CRC8Table[u8CRC^u8Data])
const uint8 u8CRC8Table[256] = {
0x00, 0x07, 0x0e, 0x09, 0x1c, 0x1b, 0x12, 0x15,
0x38, 0x3f, 0x36, 0x31, 0x24, 0x23, 0x2a, 0x2d,
0x70, 0x77, 0x7e, 0x79, 0x6c, 0x6b, 0x62, 0x65,
0x48, 0x4f, 0x46, 0x41, 0x54, 0x53, 0x5a, 0x5d,
0xe0, 0xe7, 0xee, 0xe9, 0xfc, 0xfb, 0xf2, 0xf5,
0xd8, 0xdf, 0xd6, 0xd1, 0xc4, 0xc3, 0xca, 0xcd,
0x90, 0x97, 0x9e, 0x99, 0x8c, 0x8b, 0x82, 0x85,
0xa8, 0xaf, 0xa6, 0xa1, 0xb4, 0xb3, 0xba, 0xbd,
0xc7, 0xc0, 0xc9, 0xce, 0xdb, 0xdc, 0xd5, 0xd2,
0xff, 0xf8, 0xf1, 0xf6, 0xe3, 0xe4, 0xed, 0xea,
0xb7, 0xb0, 0xb9, 0xbe, 0xab, 0xac, 0xa5, 0xa2,
0x8f, 0x88, 0x81, 0x86, 0x93, 0x94, 0x9d, 0x9a,
0x27, 0x20, 0x29, 0x2e, 0x3b, 0x3c, 0x35, 0x32,
0x1f, 0x18, 0x11, 0x16, 0x03, 0x04, 0x0d, 0x0a,
0x57, 0x50, 0x59, 0x5e, 0x4b, 0x4c, 0x45, 0x42,
0x6f, 0x68, 0x61, 0x66, 0x73, 0x74, 0x7d, 0x7a,
0x89, 0x8e, 0x87, 0x80, 0x95, 0x92, 0x9b, 0x9c,
0xb1, 0xb6, 0xbf, 0xb8, 0xad, 0xaa, 0xa3, 0xa4,
0xf9, 0xfe, 0xf7, 0xf0, 0xe5, 0xe2, 0xeb, 0xec,
0xc1, 0xc6, 0xcf, 0xc8, 0xdd, 0xda, 0xd3, 0xd4,
0x69, 0x6e, 0x67, 0x60, 0x75, 0x72, 0x7b, 0x7c,
0x51, 0x56, 0x5f, 0x58, 0x4d, 0x4a, 0x43, 0x44,
0x19, 0x1e, 0x17, 0x10, 0x05, 0x02, 0x0b, 0x0c,
0x21, 0x26, 0x2f, 0x28, 0x3d, 0x3a, 0x33, 0x34,
0x4e, 0x49, 0x40, 0x47, 0x52, 0x55, 0x5c, 0x5b,
0x76, 0x71, 0x78, 0x7f, 0x6A, 0x6d, 0x64, 0x63,
0x3e, 0x39, 0x30, 0x37, 0x22, 0x25, 0x2c, 0x2b,
0x06, 0x01, 0x08, 0x0f, 0x1a, 0x1d, 0x14, 0x13,
0xae, 0xa9, 0xa0, 0xa7, 0xb2, 0xb5, 0xbc, 0xbb,
0x96, 0x91, 0x98, 0x9f, 0x8a, 0x8D, 0x84, 0x83,
0xde, 0xd9, 0xd0, 0xd7, 0xc2, 0xc5, 0xcc, 0xcb,
0xe6, 0xe1, 0xe8, 0xef, 0xfa, 0xfd, 0xf4, 0xf3
};
static const int RX_BUF_SIZE = 200;
static const uint8_t CO_RD_VERSION[] = {0x55,0x00,0x01,0x00,0x05,0x70,0x03,0x09};
static STATES_GET_PACKET u8state = GET_SYNC_STATE;
u32 u32MyId = 0;
uint8 Read_pt = 0;
// uint8_t data[RX_BUF_SIZE] = {0};
// uint8_t Enocean_Data = 0; //数据长度记录
// uint8_t EnoceanState; //接收完成标志
#define TXD_PIN (GPIO_NUM_4)
#define RXD_PIN (GPIO_NUM_5)
void init(void) {
const uart_config_t uart_config = {
.baud_rate = 57600,
.data_bits = UART_DATA_8_BITS,
.parity = UART_PARITY_DISABLE,
.stop_bits = UART_STOP_BITS_1,
.flow_ctrl = UART_HW_FLOWCTRL_DISABLE,
.source_clk = UART_SCLK_APB,
};
// We won't use a buffer for sending data.
uart_driver_install(UART_NUM_1, RX_BUF_SIZE * 2, 0, 0, NULL, 0);
uart_param_config(UART_NUM_1, &uart_config);
uart_set_pin(UART_NUM_1, TXD_PIN, RXD_PIN, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE);
}
// int sendData(const char* logName, const char* data)
// {
// const int len = strlen(data);
// const int txBytes = uart_write_bytes(UART_NUM_1, data, len);
// // ESP_LOGI(logName, "Wrote %d bytes", txBytes);
// return txBytes;
// }
static void tx_task(void *arg)
{
// static const char *TX_TASK_TAG = "TX_TASK";
// esp_log_level_set(TX_TASK_TAG, ESP_LOG_INFO);
while (1) {
printf("get my ID when poweron!\r\n");
// sendData(TX_TASK_TAG, "Hello world");
uart_write_bytes(UART_NUM_1, CO_RD_VERSION, sizeof(CO_RD_VERSION));
// vTaskDelay(2000 / portTICK_PERIOD_MS);
vTaskDelete(NULL);
}
}
static void rx_task(void *arg)
{
RETURN_TYPE ReturnCode = 0;
static uint8 u8Count = 0;
uint8 u8CRC = 0;
// uint8 ERROR_FLAG = 0;
uint32 CHIP_ID = 0;
static const char *RX_TASK_TAG = "RX_TASK";
esp_log_level_set(RX_TASK_TAG, ESP_LOG_INFO);
uint8_t* data = (uint8_t*) malloc(RX_BUF_SIZE+1);
while (1) {
const int rxBytes = uart_read_bytes(UART_NUM_1, data, RX_BUF_SIZE, 6 / portTICK_RATE_MS);
if (rxBytes > 0) { //rxBytes是 uart_read_bytes 返回的长度数据,
data[rxBytes] = 0; //推测读取的时候使用的是 rxBytes ++ ,所以这最后一个数据是数据后面一个不需要的,所以赋值0
// ESP_LOGI(RX_TASK_TAG, "Read %d bytes: '%s'", rxBytes, data);
ESP_LOGI(RX_TASK_TAG, "Read %d bytes", rxBytes);
// printf("%x %x %x %x %x %x %x %x %x\r\n",data[0],data[1],data[2],data[3],data[4],data[5],data[6],data[7],data[8]);
if((rxBytes >= 38)&&(u32MyId == 0)){
while(Read_pt != rxBytes){
switch(u8state){
case GET_SYNC_STATE: // Waiting for packet sync byte 0x55
if (data[Read_pt++] == ESP3_SYNC_CODE){
u8state = GET_HEADER_STATE;
u8Count = 0;
u8CRC = 0;
}
// printf("111\r\n");
break;
case GET_HEADER_STATE: // Read the header bytes
u8CRC = proccrc8(u8CRC,data[Read_pt++]);
u8Count++;
// printf("222\r\n");
if(u8Count == ESP3_Header_Bytes){
u8state = CHECK_CRC8H_STATE;
u8Count = 0;
}
break;
case CHECK_CRC8H_STATE:
if(u8CRC == data[Read_pt++]){
u8state = GET_DATA_STATE;
ReturnCode = Enocean_OK;
}
// printf("333\r\n");
// else
// ERROR_FLAG = 1;
break;
case GET_DATA_STATE:
if(ReturnCode == Enocean_OK){
Read_pt = 15; //ID Info start from the 10th data of the data filed
for(u8Count=0;u8Count<4;u8Count++)
{
CHIP_ID <<= 8;
CHIP_ID |= data[Read_pt++];
}
u32MyId = CHIP_ID;
Read_pt = 0;
u8state = GET_SYNC_STATE;
}
// else
// ERROR_FLAG = 1;
break;
default:break;
}
if(u8state == GET_SYNC_STATE)break;//跳出while循环
}
}
ESP_LOG_BUFFER_HEXDUMP(RX_TASK_TAG, data, rxBytes, ESP_LOG_INFO);
printf("my ID is :0x %x\r\n",u32MyId);
}
vTaskDelay(1);//不加延时不会释放CPU使用权,会导致错误,其他任务的看门口报错
}
free(data);
}
void app_main(void)
{
init();
xTaskCreate(rx_task, "uart_rx_task", 1024*2, NULL, configMAX_PRIORITIES, NULL);
xTaskCreate(tx_task, "uart_tx_task", 1024*2, NULL, configMAX_PRIORITIES-1, NULL);
}
2、ESP32-C3 UART 基础知识说明
对于ESP32-C3 UART的介绍,同样在乐鑫的官网有很详细的说明,官方链接如下:
乐鑫官方ESP32-C3 UART部分说明
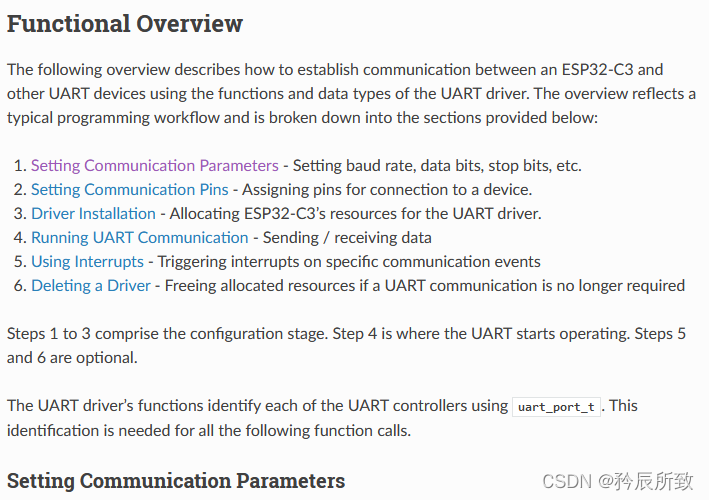
根据官方文档,ESP32-C3 UART使用步骤:
-
设置参数,使用uart_config_t结构体可以统一设置:
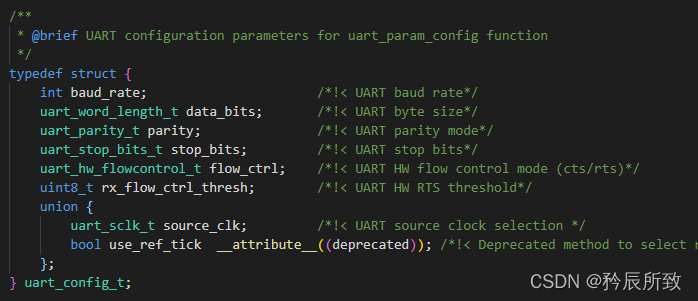
例如示例中:
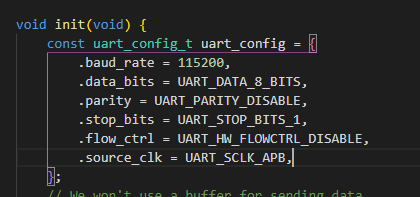
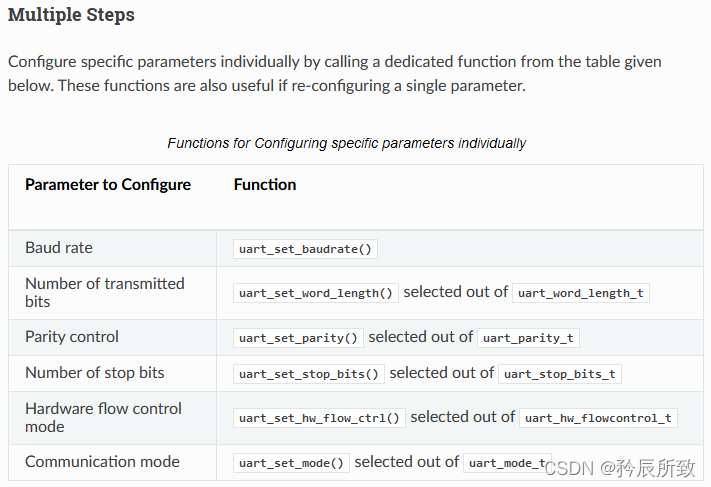
当然,出了使用结构体设置串口的参数,也可以使用函数单独对某一个参数进行设置:
-
设置收发引脚,使用uart_set_pin函数设置:
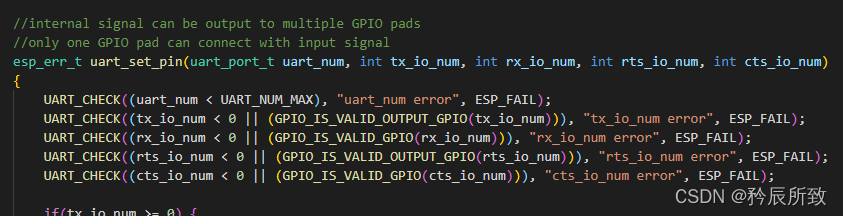
后两个参数是硬件流控,如果不需要,则可以设置为UART_PIN_NO_CHANGE,例如示例中:

-
设置串口,使用uart_driver_install函数进行 install:  参数分别为:串口号,接收缓冲区,发送缓冲区,队列长度(消息长度),中断回调函数(没有写NULL),中断标志位。
参数分别为:串口号,接收缓冲区,发送缓冲区,队列长度(消息长度),中断回调函数(没有写NULL),中断标志位。
在示例中使用:

-
完成前面3步就完成了UART的基本配置,接下来就可以进行收发了,
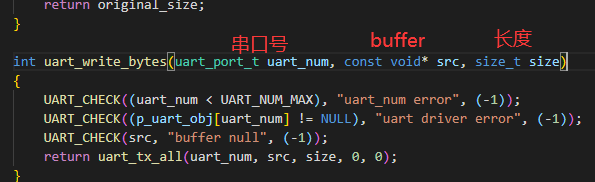
使用uart write bytes()往Tx FIFO buffer里面写数据,就可以发送数据;
使用uart read bytes()从Rx FIFO buffer里读数据,就是接收数据;

其他的工作由 FSM(UART controller’s finite state machine)完成 。
具体的使用可以查看手册上面Running UART Communication章节。
在上面的例子中,我们只测试了基本的收发,好像没有使用到和中断相关的函数。这个后期如果有需要再来更新。
对于 ESP32-C3 UART 其他的一些功能,比如 485 接口发送等,具体在官方文档有详细的说明,我们在需要使用的时候可以先看文档,然后找到对应的例程,进行更改,和本博文的收发示例一样,学习一定得多动手尝试。