车牌识别系统
算法参考:http://www.zengqiang.club/blog/34
GUI参考:https://blog.csdn.net/wzh191920/article/details/79589506
基于opencv的模板识别来实现的车牌识别功能。用pycharm写的。
车牌识别的步骤:定位车牌,矫正车牌,识别颜色,分割字符,识别字符。
算法:
定位车牌
通过对输出图片进行一系列的处理后,筛选出矩形区域
if type(car_pic) == type(""):
img = imreadex(car_pic)
else:
img = car_pic
pic_hight, pic_width = img.shape[:2]
if pic_width > MAX_WIDTH:
resize_rate = MAX_WIDTH / pic_width
img = cv2.resize(img, (MAX_WIDTH, int(pic_hight * resize_rate)), interpolation=cv2.INTER_AREA)
blur = self.cfg["blur"]
# 高斯去噪
if blur > 0:
img = cv2.GaussianBlur(img, (blur, blur), 0) # 图片分辨率调整
oldimg = img
gray_image = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) #灰度处理
Sobel_x = cv2.Sobel(gray_image, cv2.CV_16S, 1, 0) #sobel算子边缘检测
absX = cv2.convertScaleAbs(Sobel_x) #转回uint8
image = absX
ret, image = cv2.threshold(image, 0, 255, cv2.THRESH_OTSU) #自适应阈值处理
kernelX = cv2.getStructuringElement(cv2.MORPH_RECT, (14, 5)) #闭运算,白色部分练成整体
image = cv2.morphologyEx(image, cv2.MORPH_CLOSE, kernelX, iterations=1)
kernelX = cv2.getStructuringElement(cv2.MORPH_RECT, (20, 1)) #去除小白点
kernelY = cv2.getStructuringElement(cv2.MORPH_RECT, (1, 19))
image = cv2.dilate(image, kernelX) #膨胀
image = cv2.erode(image, kernelX) #腐蚀
image = cv2.erode(image, kernelY) #腐蚀
image = cv2.dilate(image, kernelY) #膨胀
image = cv2.medianBlur(image, 15) #中值滤波去除噪点
contours, hierarchy = cv2.findContours(image, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)#轮廓检测
# 一一排除不是车牌的矩形区域
car_contours = [] #筛选车牌位置的轮廓
for cnt in contours:
rect = cv2.minAreaRect(cnt)
area_width, area_height = rect[1]
if area_width < area_height:
area_width, area_height = area_height, area_width
wh_ratio = area_width / area_height
# print(wh_ratio)
# 要求矩形区域长宽比在2到5.5之间,2到5.5是车牌的长宽比,其余的矩形排除
if wh_ratio > 2 and wh_ratio < 5.5:
car_contours.append(rect)
box = cv2.boxPoints(rect)
box = np.int0(box)
print("精确定位")
矫正矩形
card_imgs = []
# 矩形区域可能是倾斜的矩形,需要矫正,以便使用颜色定位
for rect in car_contours:
if rect[2] > -1 and rect[2] < 1: # 创造角度,使得左、高、右、低拿到正确的值
angle = 1
else:
angle = rect[2]
rect = (rect[0], (rect[1][0] + 5, rect[1][1] + 5), angle) # 扩大范围,避免车牌边缘被排除
box = cv2.boxPoints(rect)
heigth_point = right_point = [0, 0]
left_point = low_point = [pic_width, pic_hight]
for point in box:
if left_point[0] > point[0]:
left_point = point
if low_point[1] > point[1]:
low_point = point
if heigth_point[1] < point[1]:
heigth_point = point
if right_point[0] < point[0]:
right_point = point
if left_point[1] <= right_point[1]: # 正角度
new_right_point = [right_point[0], heigth_point[1]]
pts2 = np.float32([left_point, heigth_point, new_right_point]) # 字符只是高度需要改变
pts1 = np.float32([left_point, heigth_point, right_point])
M = cv2.getAffineTransform(pts1, pts2)
dst = cv2.warpAffine(oldimg, M, (pic_width, pic_hight))
point_limit(new_right_point)
point_limit(heigth_point)
point_limit(left_point)
card_img = dst[int(left_point[1]):int(heigth_point[1]), int(left_point[0]):int(new_right_point[0])]
card_imgs.append(card_img)
elif left_point[1] > right_point[1]: # 负角度
new_left_point = [left_point[0], heigth_point[1]]
pts2 = np.float32([new_left_point, heigth_point, right_point]) # 字符只是高度需要改变
pts1 = np.float32([left_point, heigth_point, right_point])
M = cv2.getAffineTransform(pts1, pts2)
dst = cv2.warpAffine(oldimg, M, (pic_width, pic_hight))
point_limit(right_point)
point_limit(heigth_point)
point_limit(new_left_point)
card_img = dst[int(right_point[1]):int(heigth_point[1]), int(new_left_point[0]):int(right_point[0])]
card_imgs.append(card_img)
颜色定位
colors = []
for card_index, card_img in enumerate(card_imgs):
green = yello = blue = black = white = 0
card_img_hsv = cv2.cvtColor(card_img, cv2.COLOR_BGR2HSV)
# 有转换失败的可能,原因来自于上面矫正矩形出错
if card_img_hsv is None:
continue
row_num, col_num = card_img_hsv.shape[:2]
card_img_count = row_num * col_num
for i in range(row_num):
for j in range(col_num):
H = card_img_hsv.item(i, j, 0)
S = card_img_hsv.item(i, j, 1)
V = card_img_hsv.item(i, j, 2)
if 11 < H <= 34 and S > 34: # 图片分辨率调整
yello += 1
elif 35 < H <= 99 and S > 34: # 图片分辨率调整
green += 1
elif 99 < H <= 124 and S > 34: # 图片分辨率调整
blue += 1
if 0 < H < 180 and 0 < S < 255 and 0 < V < 46:
black += 1
elif 0 < H < 180 and 0 < S < 43 and 221 < V < 225:
white += 1
color = "no"
limit1 = limit2 = 0
if yello * 2 >= card_img_count:
color = "yello"
limit1 = 11
limit2 = 34 # 有的图片有色偏偏绿
elif green * 2 >= card_img_count:
color = "green"
limit1 = 35
limit2 = 99
elif blue * 2 >= card_img_count:
color = "blue"
limit1 = 100
limit2 = 124 # 有的图片有色偏偏紫
elif black + white >= card_img_count * 0.7: # TODO
color = "bw"
print(color)
colors.append(color)
print(blue, green, yello, black, white, card_img_count)
if limit1 == 0:
continue
识别车牌字符
predict_result = []
word_images = []
roi = None
card_color = None
for i, color in enumerate(colors):
if color in ("blue", "yello", "green"):
card_img = card_imgs[i] # 定位的车牌
gray_img = cv2.cvtColor(card_img, cv2.COLOR_BGR2GRAY)
# 黄、绿车牌字符比背景暗、与蓝车牌刚好相反,所以黄、绿车牌需要反向
if color == "green" or color == "yello":
gray_img = cv2.bitwise_not(gray_img)
ret, gray_img = cv2.threshold(gray_img, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
# 查找水平直方图波峰
x_histogram = np.sum(gray_img, axis=1)
x_min = np.min(x_histogram)
x_average = np.sum(x_histogram) / x_histogram.shape[0]
x_threshold = (x_min + x_average) / 2
wave_peaks = find_waves(x_threshold, x_histogram)
if len(wave_peaks) == 0:
print("peak less 0:")
continue
# 认为水平方向,最大的波峰为车牌区域
wave = max(wave_peaks, key=lambda x: x[1] - x[0])
gray_img = gray_img[wave[0]:wave[1]]
# 查找垂直直方图波峰
row_num, col_num = gray_img.shape[:2]
# 去掉车牌上下边缘1个像素,避免白边影响阈值判断
gray_img = gray_img[1:row_num - 1]
y_histogram = np.sum(gray_img, axis=0)
y_min = np.min(y_histogram)
y_average = np.sum(y_histogram) / y_histogram.shape[0]
y_threshold = (y_min + y_average) / 5 # U和0要求阈值偏小,否则U和0会被分成两半
wave_peaks = find_waves(y_threshold, y_histogram)
# for wave in wave_peaks:
# cv2.line(card_img, pt1=(wave[0], 5), pt2=(wave[1], 5), color=(0, 0, 255), thickness=2)
# 车牌字符数应大于6
if len(wave_peaks) <= 6:
print("peak less 1:", len(wave_peaks))
continue
wave = max(wave_peaks, key=lambda x: x[1] - x[0])
max_wave_dis = wave[1] - wave[0]
# 判断是否是左侧车牌边缘
if wave_peaks[0][1] - wave_peaks[0][0] < max_wave_dis / 3 and wave_peaks[0][0] == 0:
wave_peaks.pop(0)
# 组合分离汉字
cur_dis = 0
for i, wave in enumerate(wave_peaks):
if wave[1] - wave[0] + cur_dis > max_wave_dis * 0.6:
break
else:
cur_dis += wave[1] - wave[0]
if i > 0:
wave = (wave_peaks[0][0], wave_peaks[i][1])
wave_peaks = wave_peaks[i + 1:]
wave_peaks.insert(0, wave)
# 去除车牌上的分隔点
point = wave_peaks[2]
if point[1] - point[0] < max_wave_dis / 3:
point_img = gray_img[:, point[0]:point[1]]
if np.mean(point_img) < 255 / 5:
wave_peaks.pop(2)
if len(wave_peaks) <= 6:
print("peak less 2:", len(wave_peaks))
continue
part_cards = seperate_card(gray_img, wave_peaks)
for i, part_card in enumerate(part_cards):
# 可能是固定车牌的铆钉
if np.mean(part_card) < 255 / 5:
print("a point")
continue
part_card_old = part_card
w = abs(part_card.shape[1] - SZ) // 2
part_card = cv2.copyMakeBorder(part_card, 0, 0, w, w, cv2.BORDER_CONSTANT,
value=[0, 0, 0])
part_card = cv2.resize(part_card, (SZ, SZ), interpolation=cv2.INTER_AREA)
word_images.append(part_card)
word_images_ = word_images.copy()
predict_result = template_matching(word_images_)
roi = card_img
card_color = color
print(predict_result)
break
GUI界面:

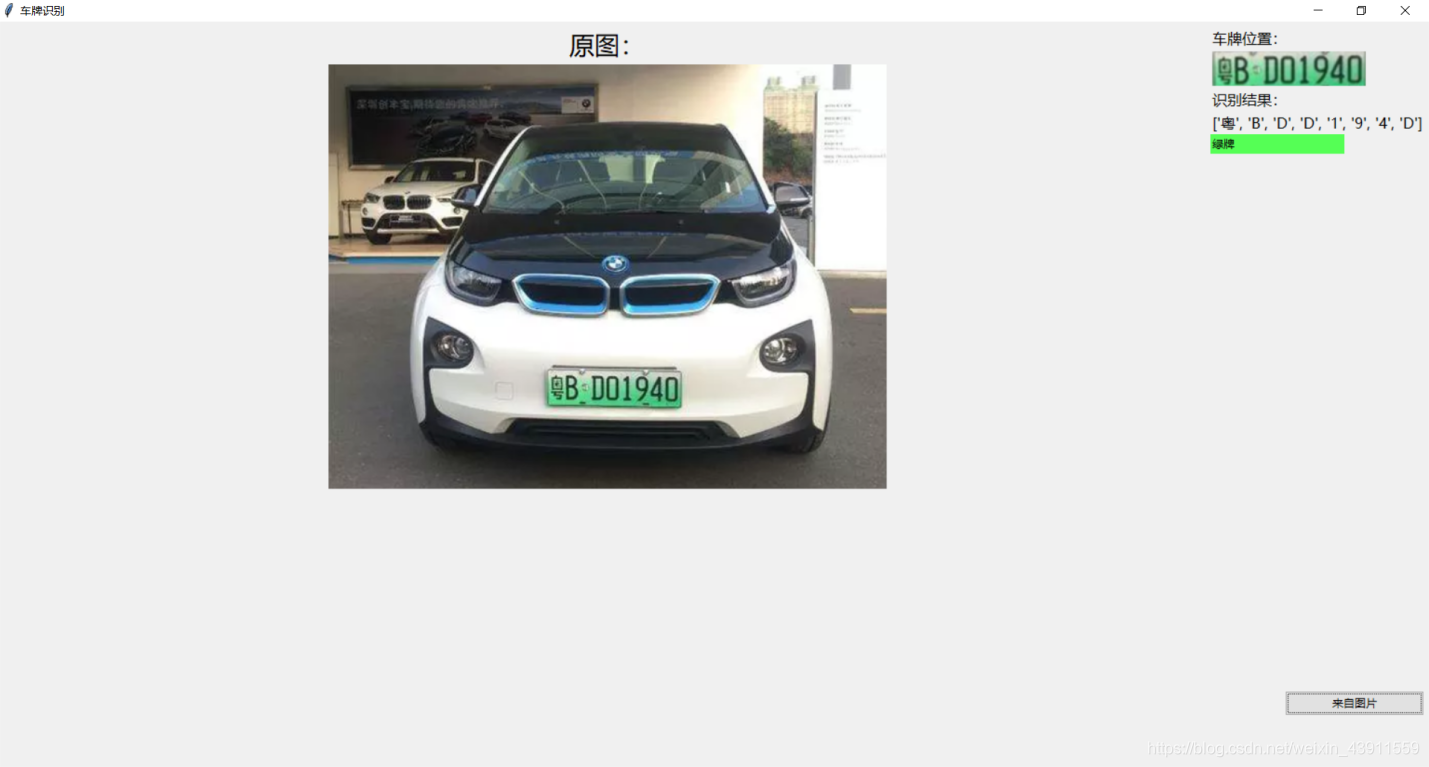
总结
这是一个比较简单粗糙的车牌识别系统,由于采用的是模板识别,模板数量越大,识别速度越慢,差不多识别一次要20s,并且受图片的质量影响,识别准确度不高甚至会出现无法识别的情况。但应付课程设计的话应该是足够了。要想做的更好的话建议识别字符采用opencv的SVM或者用tesseract.
算法和界面都参考了别人的博客,自己做了些整合和改动。
全部代码和模板放在github:https://github.com/panboshui/-
测试图片:

