目录
前言:
实物:
共阴接法:
程序做法:
电源模块设置:
问题:
源代码:
前言:
首先面试时,当项目涉及了步进电机这一块,我们需要知道:
并不需要往底层等深钻,只需要懂基本原理,怎么配置引脚,开发中遇到一些问题及如何解决,可以大胆说出项目中用步进电机遇到的问题,diss缺陷。然后后面可以用matlab之类做一些高级点的东西。
我是因为一个项目需要驱动 丝杠机械装置运动和驱动一个迷你定制版的传送带,才开始接触步进电机的。为啥选步进电机,emm需要运转速度快、控制方便、成本稍低等,虽然缺点也挺明显的,噪音、发热、调速快了易失步,后面会说到。
在之前的必经项目 《智能小车》中,我们用到的是那种黄色的直流电机,就直接通过两端的电压正负来直接控制旋转的方向,通过两端的电压大小来控制旋转的速度。直流电机也是有PWM调速版本的,所以我们也是可以将那种黄色的直流电机改造成PWM调速版本。
步进电机:比较大块头,常卖的小个头都比直流电机的大。步进电机是将电脉冲信号转变为角位移或者线位移的开环控制电机,又称脉冲电机。嗯,步进电机和脉冲电机是一回事。对于它,你可以有一个很直观的看法,那就是读脉冲个数。来多少个脉冲,它就转相应的角度,并且这个角度是可以计算的!
实物:
42步进电机,12V变压器,电源驱动模块,电线若干,共阴接法
42步进电机:
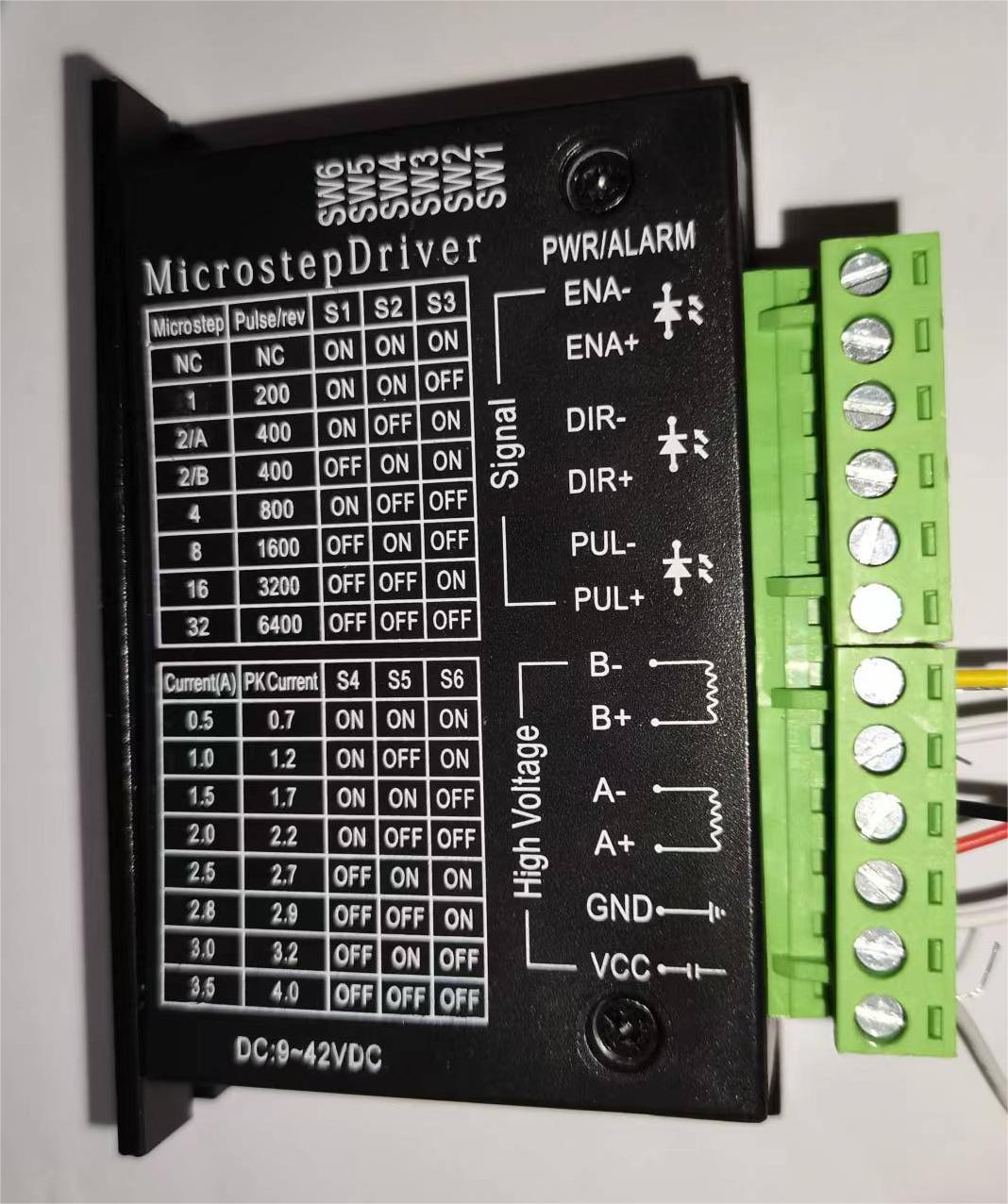
TB6600两相32细分4.0A大电流步进电机驱动模块:
电源电压适合DC:9~42VDC
12V变压器:

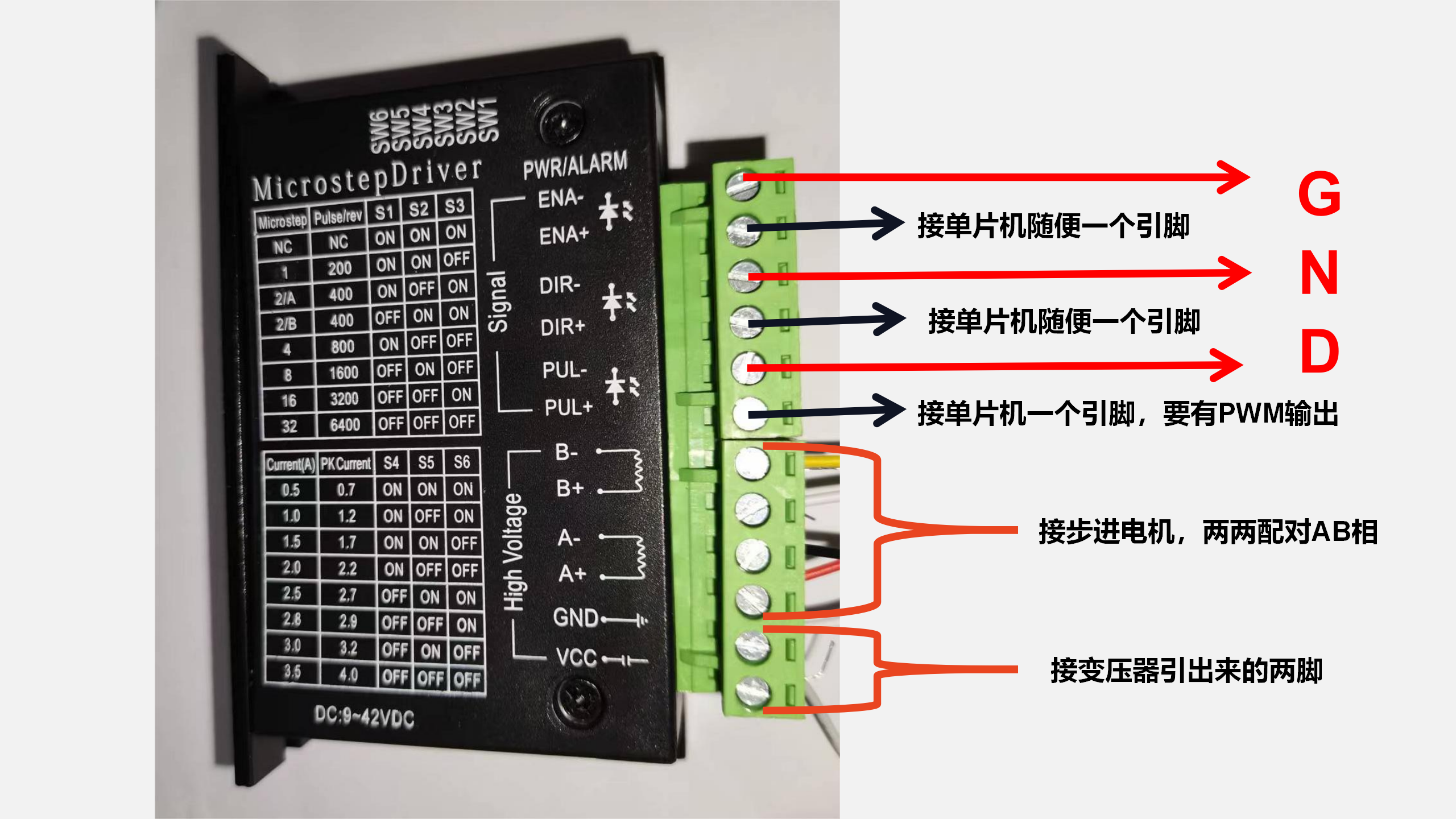
共阴接法:
电源模块中,变压器接的GND不要把单片机引脚的GND搁上去。
下图中,红色的GND是接单片机的,下面的白色GND是接电源模块。
步进电机如何区分AB相?
很简单,只需要你把步进电机的随意两根线接在一起,然后去手动转一下步进电机,很难转动就是说明这两根线属于同一相,A,B随意。
一般同相的两个线是相连的。
电源模块接好之后

接法可以从图中见,接出来的两条线就是接到电源驱动模块最下面的那个VCC和GND。
程序做法:
首先是初始化:
很明显,我们需要三个引脚,且其中一个是PWM输出的引脚,我们随便来三个,哪个顺眼用哪个:
这三个引脚的功能通过名称也很好判断,EN应该是使能,DIR应该是转向,Pluse是脉冲信号口。
| 名称 |
引脚 |
高电平(设置为1) |
低电平(设置为0) |
| Pluse+ |
PA.1 |
|
|
| DIR+ |
PA.8 |
顺时针运转 |
逆时针运转 |
| EN+ |
PA.2 |
不工作 |
使能输出 |
long current_pos[2]={0,0}; //有符号方向
DIR_Type motor_dir2=0;
u8 count[2]={0,0};
先初始化PA2,PA8:
void Driver_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能PA端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_8; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOA
GPIO_ResetBits(GPIOA,GPIO_Pin_2); //PA11输出低 使能输出 DRIVER_OE
GPIO_SetBits(GPIOA,GPIO_Pin_8); //PA8输出高 顺时针方向 DRIVER_DIR
}
选自正点原子案例历程:
初始化TIM2:
/***********************************************
//TIM2_CH2(PA1) 单脉冲输出+重复计数功能初始化
//TIM2 时钟频率 72MHz
//arr:自动重装值
//psc:时钟预分频数
************************************************/
void TIM2_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //TIM2时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIOA外设时钟使能
//设置该引脚为复用输出功能,输出TIM2 CH2的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //TIM2_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值,设置计数到这个值就产生溢出
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim,是改变作输入捕获时滤波用的并不是定时器的分频器
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ClearITPendingBit(TIM2,TIM_IT_Update); //清除的是一些中断标志位
TIM_UpdateRequestConfig(TIM2,TIM_UpdateSource_Regular); //TIM_UpdateSource_Regular 生成单一的脉冲:计数器在下一个更新事件停止,即关闭
TIM_SelectOnePulseMode(TIM2,TIM_OPMode_Single); //单脉冲模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2[1]
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出2使能
TIM_OCInitStructure.TIM_Pulse = arr>>1; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高[2]
//----[1][2]这两个配合一起然后查手册可以得到->当计时器值小于比较器设定值时则TIMX输出脚此时输出有效低电位。
TIM_OC2Init(TIM2, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable); //CH2预装载使能
TIM_ARRPreloadConfig(TIM2, ENABLE); //使能TIMx在ARR上的预装载寄存器
TIM_ITConfig(TIM2, TIM_IT_Update ,ENABLE); //TIM2使能或者失能指定的TIM中断
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //TIM2中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级0级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除TIMx的中断待处理位:TIM 中断源
TIM_Cmd(TIM2, DISABLE); //使能TIM2
}
设置TIM2中断函数:
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2,TIM_FLAG_Update)!=RESET)//更新中断
{
TIM_ClearITPendingBit(TIM2,TIM_FLAG_Update);//清除更新中断标志位
count[0]++;
TIM_GenerateEvent(TIM2,TIM_EventSource_Update);//产生一个更新事件 重新初始化计数器,
//这里产生一个脉冲送到步进电机让电机运转一个脉冲数,即不细分的情况下,一般步进电机转1.8°
//定时器初始化中,设置单脉冲模式是让计数器在下一个更新事件停止,即关闭,防止这次中断还没结束,
//下一个计数器时间已经到了使中断紊乱,也就是进入中断后,定时器自动关闭。
TIM_Cmd(TIM2, ENABLE); //使能TIM2,让定时器开始下一个脉冲计数后输出
if(count[0]==200)
{
if(motor_dir2==CW) //如果方向为顺时针
current_pos[0]+=count[0];
else //否则方向为逆时针
current_pos[0]-=count[0];
TIM_Cmd(TIM2, DISABLE); //关闭TIM2
printf("motor2当前位置=%ld\r\n",current_pos[0]);//打印输出
count[0]=0;
}
}
}
TIM启动函数:
void TIM2_Startup(u32 frequency) //启动定时器2
{
u16 temp_arr=1000000/frequency-1;
TIM_SetAutoreload(TIM2,temp_arr);//设定自动重装值
TIM_SetCompare2(TIM2,temp_arr>>1); //匹配值2等于重装值一半,是以占空比为50%,这个是一半高电平,一半低电平,
//定时器计数到最高或最低就是产生一个脉冲,脉冲从这里发送到PA1(TIM2_CH2 ),占空比越大,输出的电压越大。
TIM_SetCounter(TIM2,0);//计数器清零
TIM_Cmd(TIM2, ENABLE); //使能TIM2
}
业务处理函数:
/********************************************
//相对定位函数
//num 0~2147483647
//frequency: 20Hz~100KHz
//dir: CW(顺时针方向) CCW(逆时针方向)
*********************************************/
void Locate_Rle2(u32 frequency,DIR_Type dir) //相对定位函数
{
if(TIM2->CR1&0x01)//上一次脉冲还未发送完成 直接返回,TIM2->CR1=0x01是使能定时器,
//上面中断2函数进入后,产生一个脉冲,然后定时器自动关闭,再程序中开启,即TIM2->CR1=0x01
{
printf("\r\nThe last time pulses is not send finished,wait please!\r\n");
return;
}
if((frequency<20)||(frequency>100000))//脉冲频率不在范围内 直接返回
{
printf("\r\nThe frequency is out of range! please reset it!!(range:20Hz~100KHz)\r\n");
return;
}
motor_dir2=dir;//将枚举类型为DIR_Type的dir的值赋值给另一个枚举类型motor_dir2,方便在中断中判断motor_dir2是否为正
//然后在中断中的current_pos[0]进行总和计算出当前的位置
DRIVER_DIR2=motor_dir2; //将旋转方向赋值给DRIVER_DIR2所定义的接口
TIM2_Startup(frequency); //开启TIM2
}
main函数
int main(void)
{
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
Driver_Init(); //驱动器初始化
TIM2_Init(999,72-1); //1MHz计数频率,第一个参数自动装载值在后面TIM2_Startup函数中会被改变
while(1)
{
Locate_Rle2(800,CW);//500的意思你点进去看函数就明白了,大概就是重新设置定时器自动重装载值,让PWM一半高电平,
}
}
通电复位,就正转。多少圈,这个还跟你的电源驱动模块的设置有关:
电源模块设置:
如上图左侧,有S1--S6 6个开关,它们在模块的上方:

往上拨就是OFF,往下拨就是ON,具体看自己买的电源模块。
都是啥意思呢?
MicroStep,细分步距,
Pulse/rev,多少个脉冲一圈
我买的步进电机的步距角是1.8°,就是一个脉冲转1.8°,具体看你们自己买的步进电机的参数。假设你用到3D打印机上,要很精密的,就叫你称1.79°的瓜,错了,1.79°的角度,你如何实现?这时候就要细分了。
如调到400,那就是步进电机转一圈需要400个脉冲,这样就能到0.9°
Current(A),PK Current,设置电流参数,也是要看着自己的步进电机的额定电流来设置的。
我的设置:
| S1 |
S2 |
S3 |
S4 |
S5 |
S6 |
| ON |
ON |
OFF |
ON |
OFF |
ON |
就是初始设置,一个脉冲 1.8°
问题:
下面额想到一些面试问题,不过好像很少问这种的:
1.为什么项目中用步进电机?
呃,因为这个项目涉及到传送带和丝杠机械装置的驱动控制,需要的扭矩普通的直流电机远远达不上,所以选用了步进电机。而且步进电机可以很精准的控制旋转的方向和度数,丝杠运动也可以得到精确限位。
2.一套步进电机怎么接?
emm,这个在上面就提到了,转述一下就可以了。
3.开发中最困难的点?
1.初始化配置,有点多且复杂,还要写定时器中断函数之类,还有一个小坑就是上一个没有执行完就开始下一步的命令,这需要判断一下,并且所有函数先经过这个判断函数才可以进行下一步。
2.优先级的设置,电机在运转时,TIM中断函数会打断原来主函数的进行,如果没有设置好的话,那就会成为电机运行中,单片机其他所有服务都会被限制,更可能直接停止。所以优先级也是一个大的问题。
3.开发中的噪音,发热问题,无法解决,尤其是步进电机驱动丝杠时,有一定载荷的时候,就一直搁那发出大的噪音,听到人实在难受。而且在正转后再反转这种稍微密集一点的操作就开始发热发烫。还好工作过程中并未有接触,倒也可以接受。
4.....
不公开部分)
源代码:
下面的工程基本配置
/*
步进电机1,由按键PA.0控制
Pluse+->PA.1,Pluse-接GND
DIR+->PA.8,DIR-接GND0
EN+->PA.2,EN-接GND
KEY1-->PA.0 正转
KEY2-->PC.13 反转
*/
实现两个按钮控制一个步进电机的正反转。
奶牛快传:
奶牛快传 | 免费大文件传输工具,上传下载不限速 点击链接查看 [ 单步进电机控制.rar ] ,或访问奶牛快传 cowtransfer.com 输入传输口令 37twbn 查看;