简单介绍YOLOv8
这里主要关注模型的backbone和后处理的过程,并通过对比YOLOv5的架构来更深入的了解YOLOv8。
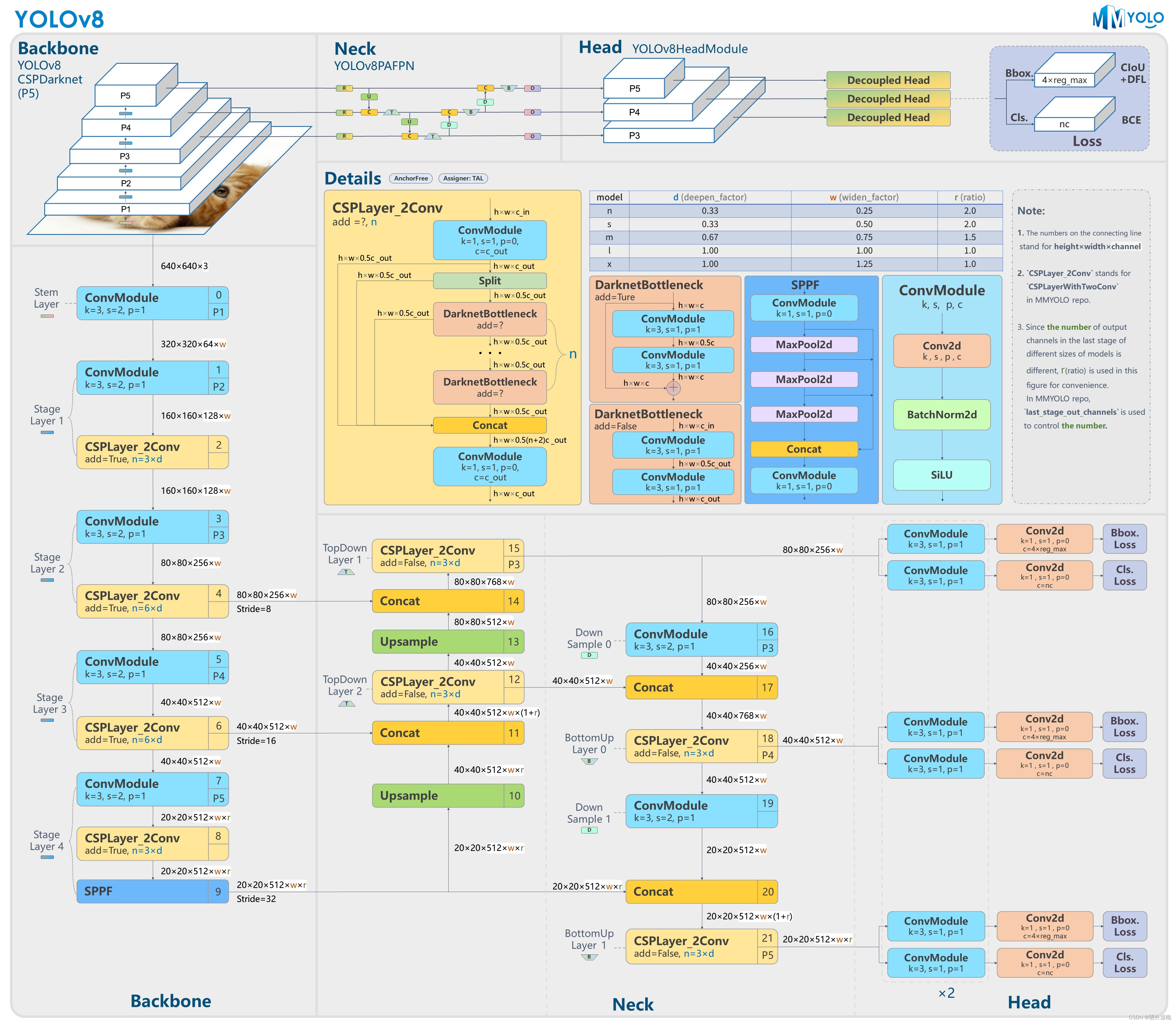
模型框架
-
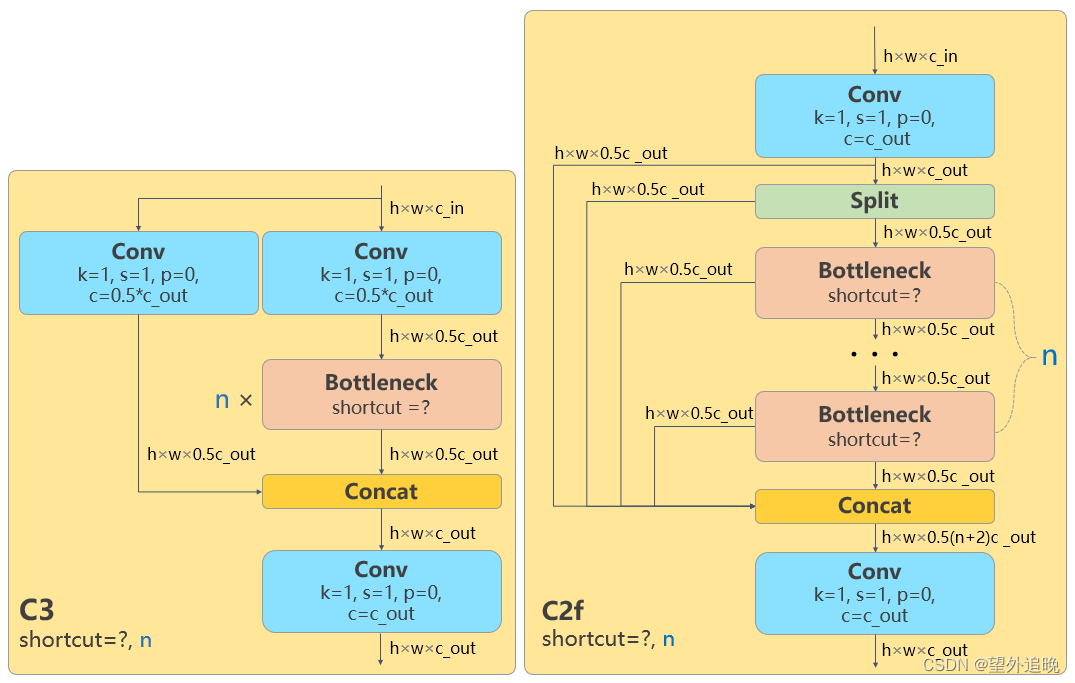
YOLOv5中的C3替换为更精简的C2f ,即增加了更多的跳跃连接和split操作;
-
Backbone 中 C2f 的block 数从 3-6-9-3 改成了 3-6-6-3;
-
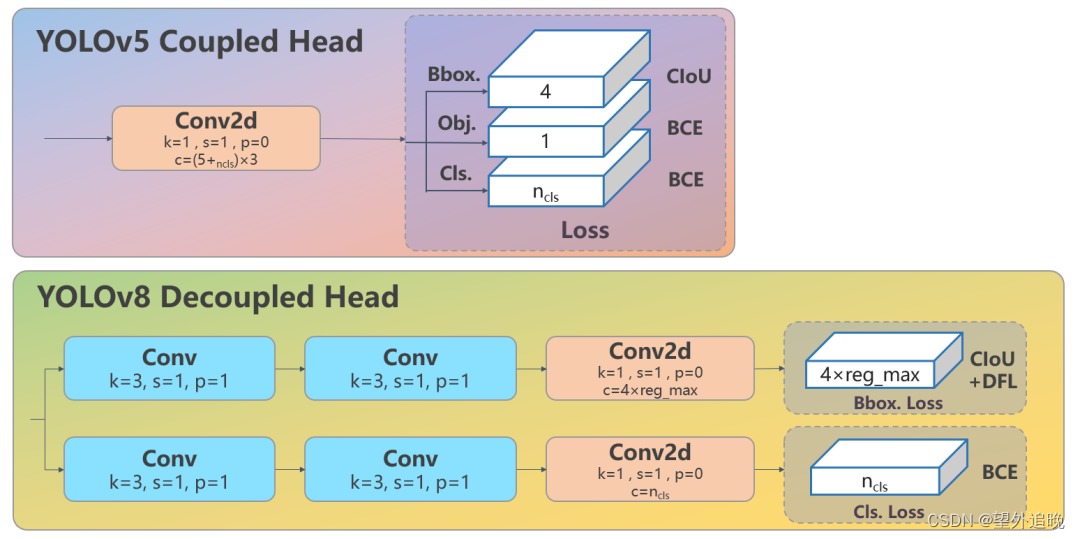
耦合头变成了解耦头,分类和回归分为两个分支分别进行;
数据前处理
1、letterbox缩放:
yolov8的输入是640*640,原图需要resize至标准大小输入网络,而直接采用拉伸的方式有可能会造成目标比例失衡(失真),所以yolov8沿用了v5的方式,即等比例缩放(宽/高至640时,剩余使用背景填充)。
模型推理
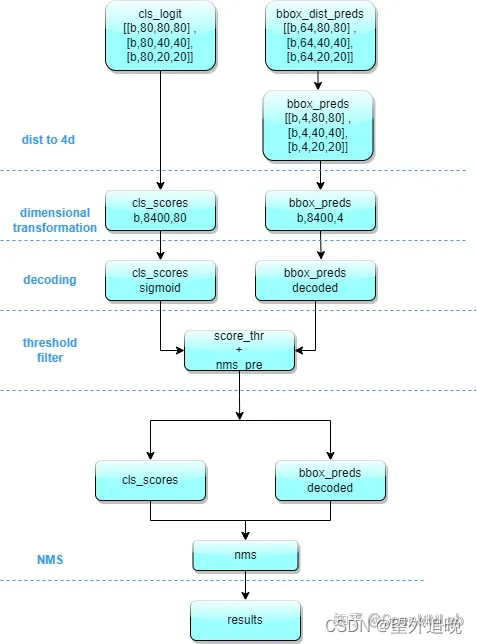
1.对 Head 输出的 bbox 分支进行转换,利用 Softmax 和 Conv 计算将积分形式转换为 4 维 bbox 格式。
2.YOLOv8 输出特征图尺度为 80x80、40x40 和 20x20 的三个特征图。Head 部分输出分类和回归共 6 个尺度的特征图。
将 6个不同尺度的特征图分别按照两个分支进行拼接,并进行维度变换。为了后续方便处理,会将原先的通道维度置换到最后,类别预测分支和 bbox 预测分支 shape 分别为 (b, 80x80+40x40+20x20, 80)=(b,8400,80),(b,8400,4)。
3.对(8400,84)进行后处理,首先采用 score_thr 进行阈值过滤。在这过程中还需要考虑 multi_label 和 nms_pre,确保过滤后的检测框数目不会多于 nms_pre。然后进行 nms ,使得最终输出的检测框不能多于 max_per_img。
4.筛选后的输出output_box格式为N*[x,y,w,h,conf,class]。N为筛选后预测框的个数,conf为最大类别概率。通过[x,y,w,h,conf,class]可以将预测框输出绘制在原图像上,由于图像的前处理经过了等比例缩放,所以此时要先将预测框的坐标转换为原坐标系的坐标。
5.输出的ret的格式为N * [x1,y1,x2,y2,conf,class]。
处理代码
import copy
import onnxruntime as rt
import numpy as np
import cv2
import matplotlib.pyplot as plt
import yaml
# 前处理(将原图宽/高等比例resize至640*640,剩余部分使用背景填充)
def resize_image(image, size, letterbox_image):
"""
对输入图像进行resize
Args:
size:目标尺寸
letterbox_image: bool 是否进行letterbox变换
Returns:指定尺寸的图像
"""
ih, iw, _ = image.shape
print(ih, iw)
h, w = size
# letterbox_image = False
if letterbox_image:
scale = min(w/iw, h/ih)
nw = int(iw*scale)
nh = int(ih*scale)
image = cv2.resize(image, (nw, nh), interpolation=cv2.INTER_LINEAR)
# cv2.imshow("img", img)
# cv2.waitKey()
# print(image.shape)
# 生成画布
image_back = np.ones((h, w, 3), dtype=np.uint8) * 128
# 将image放在画布中心区域-letterbox
image_back[(h-nh)//2: (h-nh)//2 + nh, (w-nw)//2:(w-nw)//2+nw , :] = image
else:
image_back = image
# cv2.imshow("img", image_back)
# cv2.waitKey()
return image_back # 返回图像和坐标原点
# 数据预处理
def img2input(img):
img = np.transpose(img, (2, 0, 1))
img = img/255
return np.expand_dims(img, axis=0).astype(np.float32)
def std_output(pred):
"""
将(1,84,8400)处理成(8400, 85) 85= box:4 conf:1 cls:80
"""
pred = np.squeeze(pred)
pred = np.transpose(pred, (1, 0))
pred_class = pred[..., 4:]
pred_conf = np.max(pred_class, axis=-1)
pred = np.insert(pred, 4, pred_conf, axis=-1)
return pred # (8400,85)
def xywh2xyxy(*box):
"""
将xywh转换为左上角点和左下角点
Args:
box:
Returns: x1y1x2y2
"""
ret = [box[0] - box[2] // 2, box[1] - box[3] // 2, \
box[0] + box[2] // 2, box[1] + box[3] // 2]
return ret
def get_inter(box1, box2):
"""
计算相交部分面积
Args:
box1: 第一个框
box2: 第二个狂
Returns: 相交部分的面积
"""
x1, y1, x2, y2 = xywh2xyxy(*box1)
x3, y3, x4, y4 = xywh2xyxy(*box2)
# 验证是否存在交集
if x1 >= x4 or x2 <= x3:
return 0
if y1 >= y4 or y2 <= y3:
return 0
# 将x1,x2,x3,x4排序,因为已经验证了两个框相交,所以x3-x2就是交集的宽
x_list = sorted([x1, x2, x3, x4])
x_inter = x_list[2] - x_list[1]
# 将y1,y2,y3,y4排序,因为已经验证了两个框相交,所以y3-y2就是交集的宽
y_list = sorted([y1, y2, y3, y4])
y_inter = y_list[2] - y_list[1]
# 计算交集的面积
inter = x_inter * y_inter
return inter
def get_iou(box1, box2):
"""
计算交并比: (A n B)/(A + B - A n B)
Args:
box1: 第一个框
box2: 第二个框
Returns: # 返回交并比的值
"""
box1_area = box1[2] * box1[3] # 计算第一个框的面积
box2_area = box2[2] * box2[3] # 计算第二个框的面积
inter_area = get_inter(box1, box2)
union = box1_area + box2_area - inter_area #(A n B)/(A + B - A n B)
iou = inter_area / union
return iou
def nms(pred, conf_thres, iou_thres):
"""
非极大值抑制nms
Args:
pred: 模型输出特征图
conf_thres: 置信度阈值
iou_thres: iou阈值
Returns: 输出后的结果
"""
box = pred[pred[..., 4] > conf_thres] # 置信度筛选
cls_conf = box[..., 5:]
cls = []
for i in range(len(cls_conf)):
cls.append(int(np.argmax(cls_conf[i])))
total_cls = list(set(cls)) # 记录图像内共出现几种物体
output_box = []
# 每个预测类别分开考虑
for i in range(len(total_cls)):
clss = total_cls[i]
cls_box = []
temp = box[:, :6]
for j in range(len(cls)):
# 记录[x,y,w,h,conf(最大类别概率),class]值
if cls[j] == clss:
temp[j][5] = clss
cls_box.append(temp[j][:6])
# cls_box 里面是[x,y,w,h,conf(最大类别概率),class]
cls_box = np.array(cls_box)
sort_cls_box = sorted(cls_box, key=lambda x: -x[4]) # 将cls_box按置信度从大到小排序
# box_conf_sort = np.argsort(-box_conf)
# 得到置信度最大的预测框
max_conf_box = sort_cls_box[0]
output_box.append(max_conf_box)
sort_cls_box = np.delete(sort_cls_box, 0, 0)
# 对除max_conf_box外其他的框进行非极大值抑制
while len(sort_cls_box) > 0:
# 得到当前最大的框
max_conf_box = output_box[-1]
del_index = []
for j in range(len(sort_cls_box)):
current_box = sort_cls_box[j]
iou = get_iou(max_conf_box, current_box)
if iou > iou_thres:
# 筛选出与当前最大框Iou大于阈值的框的索引
del_index.append(j)
# 删除这些索引
sort_cls_box = np.delete(sort_cls_box, del_index, 0)
if len(sort_cls_box) > 0:
# 我认为这里需要将clas_box先按置信度排序, 才能每次取第一个
output_box.append(sort_cls_box[0])
sort_cls_box = np.delete(sort_cls_box, 0, 0)
return output_box
# 坐标框映射
def cod_trf(result, pre, after):
"""
因为预测框是在经过letterbox后的图像上做预测所以需要将预测框的坐标映射回原图像上
Args:
result: [x,y,w,h,conf(最大类别概率),class]
pre: 原尺寸图像
after: 经过letterbox处理后的图像
Returns: 坐标变换后的结果,
"""
res = np.array(result)
x, y, w, h, conf, cls = res.transpose((1, 0))
x1, y1, x2, y2 = xywh2xyxy(x, y, w, h) # 左上角点和右下角的点
h_pre, w_pre, _ = pre.shape
h_after, w_after, _ = after.shape
scale = max(w_pre/w_after, h_pre/h_after) # 缩放比例
h_pre, w_pre = h_pre/scale, w_pre/scale # 计算原图在等比例缩放后的尺寸
x_move, y_move = abs(w_pre-w_after)//2, abs(h_pre-h_after)//2 # 计算平移的量
ret_x1, ret_x2 = (x1 - x_move) * scale, (x2 - x_move) * scale
ret_y1, ret_y2 = (y1 - y_move) * scale, (y2 - y_move) * scale
ret = np.array([ret_x1, ret_y1, ret_x2, ret_y2, conf, cls]).transpose((1, 0))
return ret
def draw(res, image, cls):
"""
将预测框绘制在image上
Args:
res: 预测框数据
image: 原图
cls: 类别列表,类似["apple", "banana", "people"] 可以自己设计或者通过数据集的yaml文件获取
Returns:
"""
for r in res:
# 画框
image = cv2.rectangle(image, (int(r[0]), int(r[1])), (int(r[2]), int(r[3])), (255, 0, 0), 1)
# 表明类别
text = "{}:{}".format(cls[int(r[5])], \
round(float(r[4]), 2))
h, w = int(r[3]) - int(r[1]), int(r[2]) - int(r[0]) # 计算预测框的长宽
font_size = min(h/640, w/640) * 3 # 计算字体大小(随框大小调整)
image = cv2.putText(image, text, (max(10, int(r[0])), max(20, int(r[1]))), cv2.FONT_HERSHEY_COMPLEX, max(font_size, 0.3), (0, 0, 255), 1) # max()为了确保字体不过界
cv2.imshow("result", image)
cv2.waitKey()
return image
# 加载配置文件
config_file = "my_datasets/my_datasets.yaml"
with open(config_file, "r") as config:
config = yaml.safe_load(config)
if __name__ == '__main__':
std_h, std_w = 640, 640 # 标准输入尺寸
dic = config["names"] # 得到的是模型类别字典
class_list = list(dic.values())
input_path = "my_datasets/images/" # 输入图片的根目录路径
img_path = "000000000074.jpg" # 输入图片的文件名
img = cv2.imread(input_path+img_path)
if img.size == 0:
print("路径有误!")
# 前处理
img_after = resize_image(img, (std_w, std_h), True) # (640, 640, 3)
# 将图像处理成输入的格式
data = img2input(img_after)
# 输入模型
sess = rt.InferenceSession('runs/detect/train49/weights/best.onnx') # yolov8模型onnx格式
input_name = sess.get_inputs()[0].name
label_name = sess.get_outputs()[0].name
pred = sess.run([label_name], {input_name: data})[0] # 输出(bs, 84=80cls+4reg, 8400=3种尺度的特征图叠加), 这里的预测框的回归参数是xywh, 而不是中心点到框边界的距离
pred = std_output(pred)
result = nms(pred, 0.5, 0.4) # [x,y,w,h,conf(最大类别概率),class]
# 返回了三个框, 第三个框和第一个和第二个都有相交
result = cod_trf(result, img, img_after)
image = draw(result, img, class_list)
# 保存输出图像
out_path = "./runs/my_predicts/"
cv2.imwrite(out_path + img_path, image)
cv2.destroyWindow("result")
reference
[1]: https://zhuanlan.zhihu.com/p/598566644?utm_id=0
[2]: https://blog.csdn.net/kuabiku/article/details/132083671