这里把步进电机的资料做个整合
步进电机是什么
什么是步进电机?
步进电机是将电脉冲信号,转变为角位移或线位移的开环控制电机,又称为脉冲电机。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。当步进驱动器接收到一个脉冲信号时,它就可以驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”。
原理
下面是原理
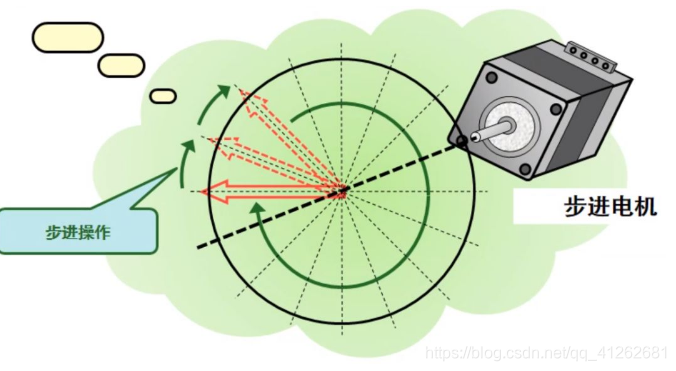
步进电机是通过脉冲信号来进行控制,每输入一个脉冲信号,步进电机前进一步。步进电机旋转的步距角,是在电机结构的基础上等比例控制产生的,如果控制电路的细分控制不变,那么步进旋转的步距角在理论上是一个固定的角度。在实际工作中,电机旋转的步距角会有微小的差别,主要是由于电机结构上的固定有误差产生的,而且这种误差不会积累。
(就是说每一步之间可能有微小差距,但整体转一圈是固定的200步,这个不变,下面会解释)
步进电机的总极数越大,加工精度的要求就会越高。通常工业用混合型步进电机的步距角是1.8度,就是200极。(极等同于步)
步进电机组成最主要的就是转子和定子部分
定子
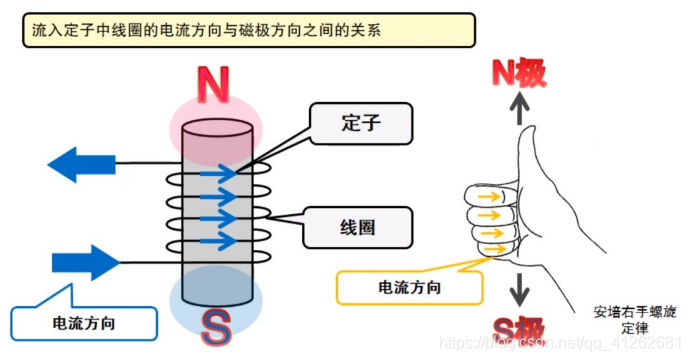
第一个概念,定子,就是由电流控制磁场方向,满足安培右手螺旋定律
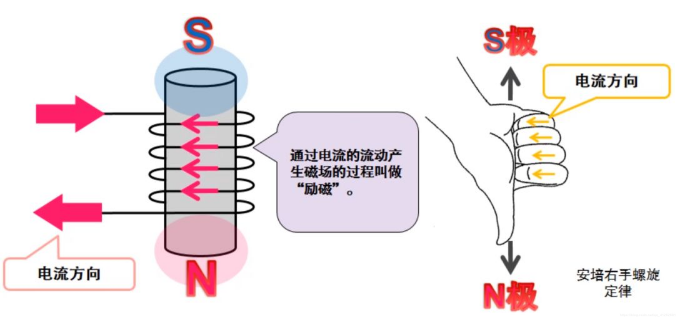
步进电机的电流流过定子产生磁场的过程叫做励磁。
拿常用的二相四线举例

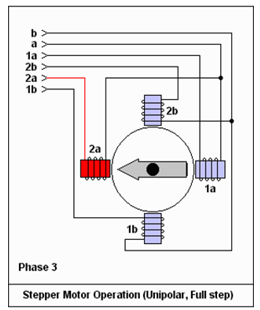
通常所说的二相步进电机,电机转子的旋转,包含不同磁极的磁场相斥和相吸实现的。如上图所示,A相产生N极磁场吸引转子的S极,B相产生S极磁场吸引转子的N极,使定子产生旋转的动力。如果改变A、B相定子线圈的电流方向,电机会产生另一步的旋转。连续改变A、B相定子线圈的电流方向,电机会产生连续的旋转。
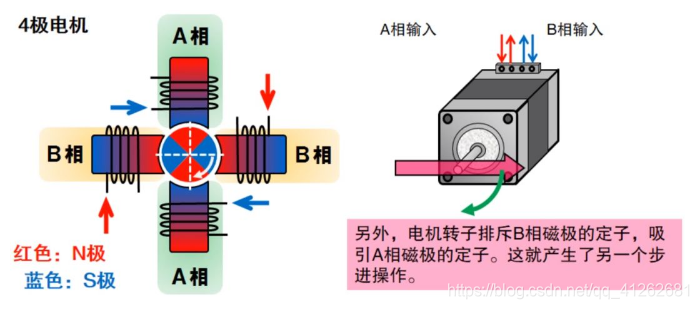
如上图所示,电机的运动是通过改变电流在电机中的流动来实现的,电子转子排斥B相磁极的定子,吸引A相磁极的定子,这就产生了另一个步进操作。
定子的种类
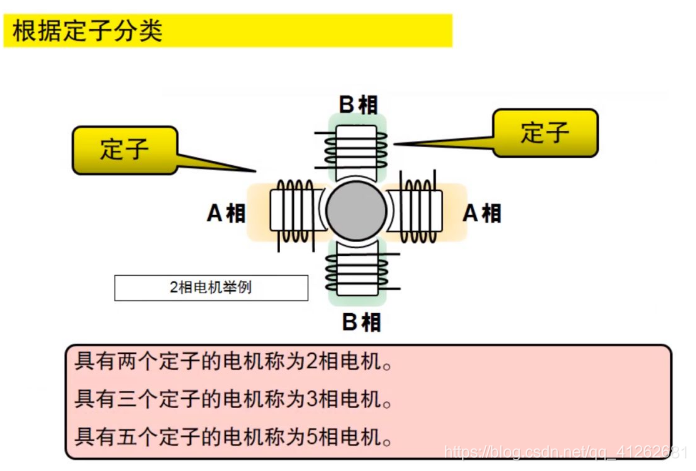
步进电机按照定子上绕组来分类,共有二相、三相和五相等系列。目前最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
该种电机的基本步距角为1.8度/步,配上半步驱动器后,步距角减少为0.9度,配上细分驱动器后。其步距角可细分达256倍(0.007度/微步)。由于摩檫力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度的效果。(细分驱动器后面介绍)
转子及其种类
转子被定子环绕在中间受定子磁场变化产生转动
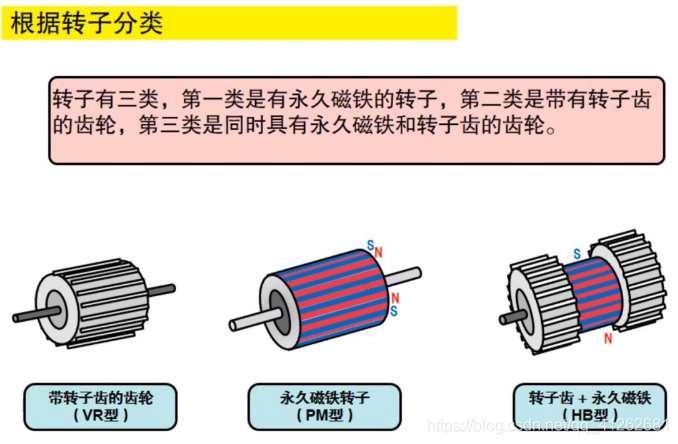
按照转子分类,有三种主要类型:反应式(VR型)、永磁式(PM型)、混合式(HB型)。
反应式
定子上有绕组,绕组由软磁材料组成。其结构简单、成本低、步距角小,可达1.2度,但动态性能差,效率低、发热大,可靠性难以保证。
永磁式
永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机度差,步距角大(一般为7.5度或15度)。(很好理解,如果磁性太强,再排斥和吸引的时候力也就更大)
混合式
混合式步进电机综合了反应式和永磁式的优点,其定子上有很多相绕组,转子上采用永磁材料,转子和定子均有多个小齿以提高步距精度。其特点是输出力矩大、动态性能好、步距角小,但结构复杂、成本相对较高。
说到这里
肯定有一个疑问,就是上面带转子齿是怎么实现转动的
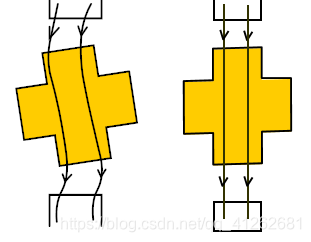
给定子绕组通电时,转子齿偏离定子齿一个角度。
由于励磁磁通力图沿磁阻最小路径通过,因此对转子产生电磁吸力,迫使转子齿转动,
当转子转到与定子齿对齐位置时,因转子只受径向力而无切线力,故转矩为零,转子被锁定在这个位置上。由此可见:错齿是助使步进电机旋转的根本原因!!!
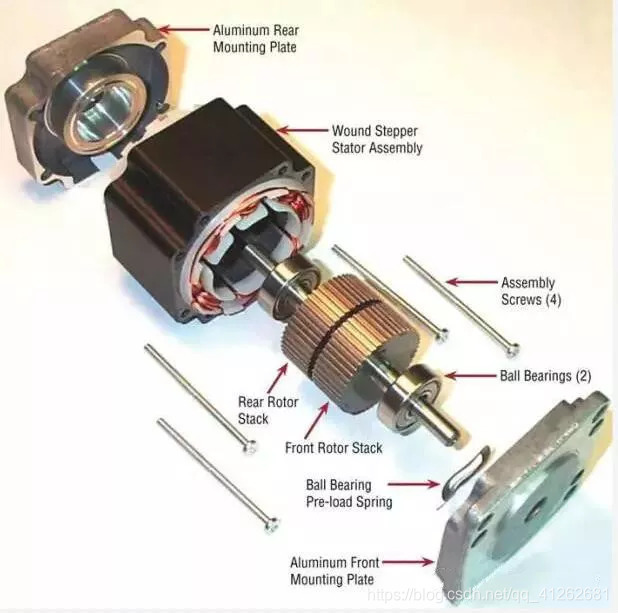
找到一个步进电机的拆解图
工作方式
接下来了解几个概念
“相”-绕组的个数
“齿距角” -转子相邻两齿的夹角
“拍”-绕组的通电状态。如:三拍表示一个周期共有3种通电状态,六拍表示一个周期有6种通电状态,每个周期步进电机转动一个齿距角。
“步距角”- 转子每拍转动的角度
步距角θ=360/(NZ)
N:步进电机的拍数 Z:转子的齿数。
(注意:齿距角和步距角不一样)
结论:步距角反映出步进电机的精度,步距角越小,该步进电机能够输出的单位位移量越小。步距角与电机本身结构(转子齿数)和工作方式(拍数)有关
工作方式,这里拿三相步进电机举例
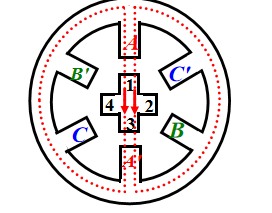
单拍方式
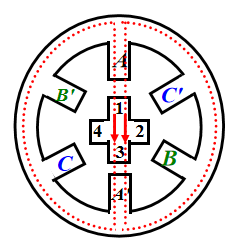
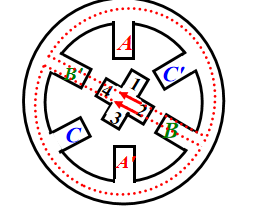
A相绕组通电,B、C 相不通电。
由于在磁场作用下,转子总是力图旋转到磁阻最小的位置,故在这种情况下,转子必然转到左图所示位置:1、3齿与A、A′极对齐。
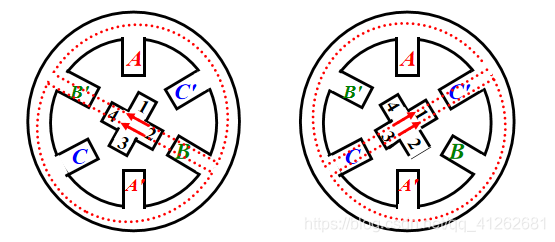
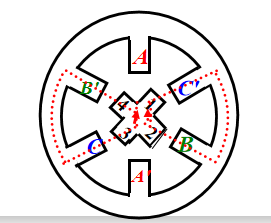
同理,B相通电时,转子会转过30°角,2、4齿和B、B´ 磁极轴线对齐;当C相通电时,转子再转过30°角,1、3齿和C´、C 磁极轴线对齐。
这种工作方式下,三个绕组依次通电一次为一个循环周期,一个循环周期包括三个工作脉冲,所以称为三相单三拍工作方式。
按A->B->C->A-> ……的顺序给三相绕组轮流通电,转子便一步一步转动起来。每一拍转过30°(步距角),每个通电循环周期(3拍)转过90°(一个齿距角)。
双拍方式
按AB->BC->CA的顺序给三相绕组轮流通电。每拍有两相绕组同时通电。
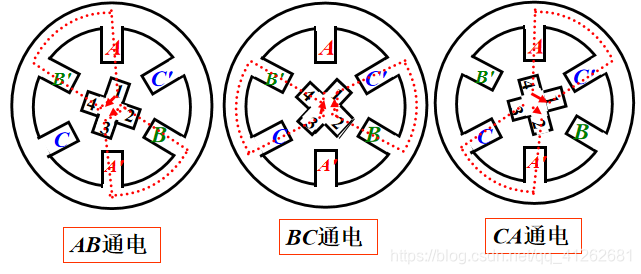
与单三拍方式相似,双三拍驱动时每个通电循环周期也分为三拍。每拍转子转过30° (步距角),一个通电循环周期(3拍)转子转过90°(齿距角)。
单双拍方式
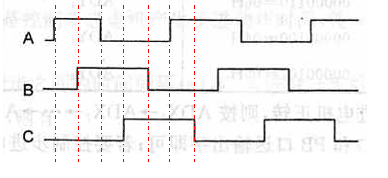
按A->AB->B->BC->C->CA的顺序给三相绕组轮流通电。这种方式可以获得更精确的控制特性。
A相通电,转子1、3齿与A、A’ 对齐。
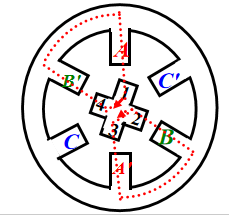
A、B相同时通电,A、A’ 磁极拉住1、3齿,B、B’ 磁极拉住2、4齿,转子转过15,到达左图所示位置。
B 相通电,转子2、4齿与B、B´ 对齐,又转过15°。
B、C相同时通电,C’ 、C 磁极拉住1、3齿,B、B’ 磁极拉住2、4齿,转子再转过15°。
总结
单拍——实现简单,性能较差
双拍——转矩较大,带负载能力较强
单双拍——步距角较小,控制精度较高
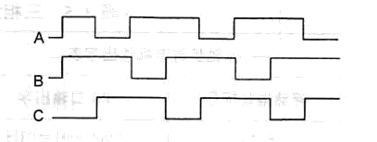
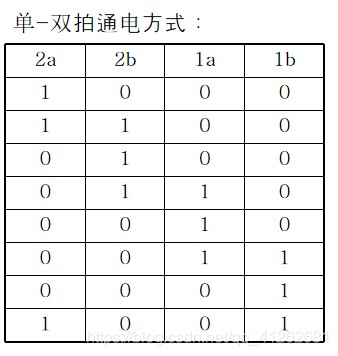
通电方式
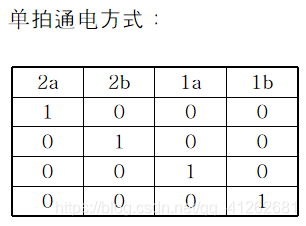
以下以两相四线举例讲通电方式
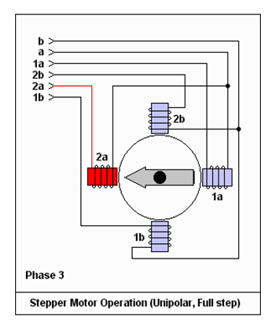
单拍控制
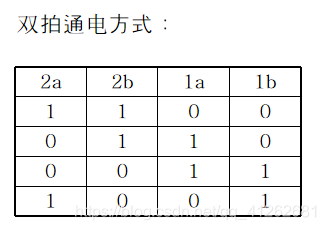
双拍控制
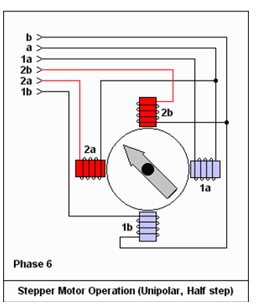
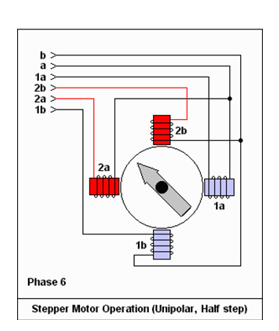
单双拍控制
下面讲驱动器部分
驱动器
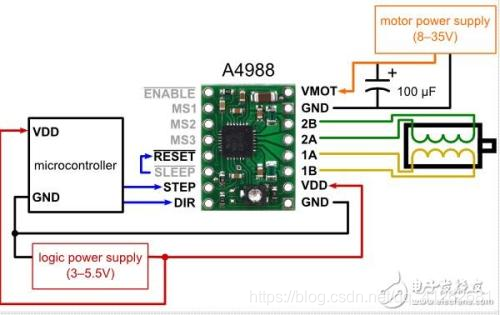
用的是A4988驱动器
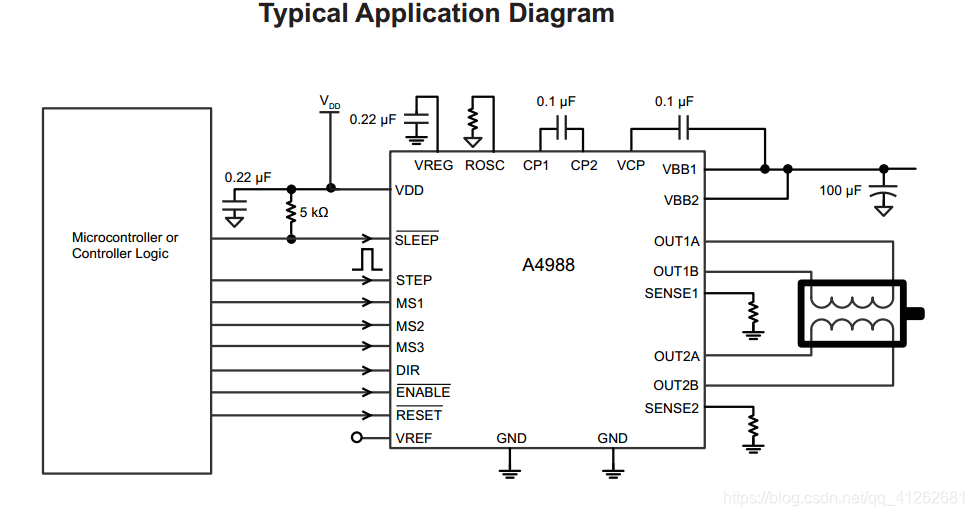
datasheet下载地址

datasheet里的图
主要就是几个引脚:
DIR:控制正反转,=1:正转,=0:反转;
STEP:接PWM,每个脉冲转对应一个角度;(频率要小于50khz)
sleep,reset:通常短接;
MS1,MS2,MS3:MS1和MS3引脚具有100kΩ的下拉电阻,MS2引脚具有50kΩ的下拉电阻。
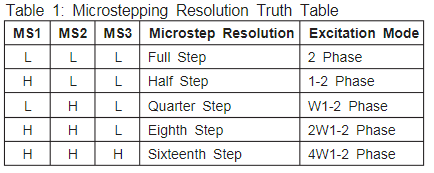
控制细分的引脚
000:全步
100:二分步
010:4分步
110:8分步
111:16分步
VDD:接3.3V或者5V;
VMOT:电机直流供电:8~35V;
1B 1A 2A 2B:接步进电机 ,通常四相电机红绿为一组,蓝黄为一组,即1A,1B接步进电机的一组线圈,2A,2B接步进电机的一组线圈
驱动程序
接好线之后
step控制速度,dir控制方向
这里给个简单程序
51版
#include<reg52.h>
typedef unsigned char u8;
typedef unsigned int u16;
typedef unsigned long u32;
u8 TR0H;
u8 TR0L;
bit flag_5s=0;
u32 PeriodCnt = 0;
u8 HighRH = 0;
u8 HighRL = 0;
u8 LowRH = 0;
u8 LowRL = 0;
u8 T1RH = 0;
u8 T1RL = 0;
sbit STEP=P3^2;//step引脚定义
sbit DIR=P3^3;//Dir引脚定义
void ConfigPWM(u16 fr, u8 dc);//配置PWM,fr频率,dc占空比
void ConfigTimer1(u8 ms);
延时程序 11.0592mhz
/oid delayms(u16 t)
//{
// u16 i,j;
// for(i=t;i>0;i--)
// for(j=114;j>0;j--);
//}
void main()
{
DIR=1;
ConfigTimer1(100);
ConfigPWM(500,50);//pwn配置
EA = 1;//打开总中断
while(1)
{
if(flag_5s==1)
{
flag_5s=0;
if(DIR)
{
DIR=0;
}
else
{
DIR=1;
}
}
}
}
void ConfigTimer1(u8 ms)
{
u32 temp;
temp=11059200/12;
temp=(temp*ms)/1000;
temp=65535-temp;
TR0H=(u8)(temp>>8);
TR0L=(u8)temp;
TMOD&=0XF0;
TMOD|=0x10;
TH1=TR0H;
TL1=TR0L;
ET1=1;
TR1=1;
}
//pwm配置程序
void ConfigPWM(u16 fr, u8 dc)
{
u16 high, low;
PeriodCnt = (11059200/12)/fr;
high = (PeriodCnt*dc)/100;
low = PeriodCnt - high;
high = 65536 - high;
low = 65536 - low;
HighRH = (u8)(high>>8);
HighRL = (u8)high;
LowRH = (u8)(low>>8);
LowRL = (u8)low;
TMOD &= 0xF0;
TMOD |= 0x01;
TH0 = HighRH;
TL0 = HighRL;
ET0 = 1;
TR0 = 1;
STEP = 1;
}
//pwm中断程序
void InterruptTimer0() interrupt 1
{
if(STEP == 1)
{
TH0 = LowRH;
TL0 = LowRL;
STEP = 0;
}
else
{
TH0 = HighRH;
TL0 = HighRL;
STEP = 1;
}
}
void Timer1()interrupt 3
{
static u8 times=0;
TH1=TR0H;
TL1=TR0L;
times++;
if(times>200)
{
times=0;
flag_5s=1;
}
}
效果是5s正转5s反转