多主站ROS配置和mutimaster_fkie
ROS版本:kinetic
操作系统:Ubuntu 16.04。
multimaster_fkie:github
1网络配置
1.1路由器
- 设置无线路由器并连接两台计算机/机器人。
- 为这两台计算机设置静态IP地址。
- 相互测试ping命令和ssh。
1.2主机
我们将计算机0定义为主计算机C0,将计算机1定义为客户端计算机C1。
在C0和C1上,备份其/ etc / hosts文件并修改这些文件以注册其IP地址。
注意:最好使用计算机名作为C0和C1的主机名。在这里,“计算机名称”是/ etc / hosts文件中“ 127.0.1.1”旁边出现的名称。ROS和multimaster_fkie的node_manager以不同的方式对待不同种类的“主机名”。只是不要尝试“配置”它们。您最好再次检查/ etc / hostname的内容是否与/ etc / hosts中的名称一致。
一个/ etc / hosts文件示例如下图1所示。现在,让我们使用我自己的计算机作为C0(主机名:yyhu-live)。客户端计算机为C1(主机名:ai-airlab)。
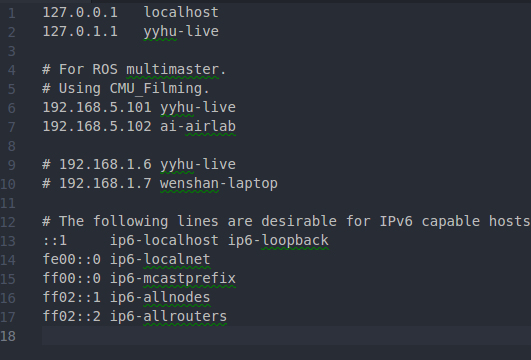
图1 C0上的/ etc / hosts文件示例。↑yyhu-live是我的计算机的主机名。127.0.0.1和192.168.5.101被分配了相同的主机名。
从两端使用新定义的主机名对C0和C1进行ping操作。
1.3 ROS网络
本节主要通过参考pdf组成。(“ Sergi Hernandez Juan和Fernando Herrero Cotarelo的“多主ROS系统”)
在每台计算机上,将此行放入其.bashrc文件中。
export ROS_MASTER_URI=http://yyhu-live:11311
要通过SSH使用ROS,在Ubuntu 16系统上,用户必须在其.bashrc文件中注释以下行,如图2所示。(请参见此处。multimaster_fkie的官方网站也提到了此问题。)
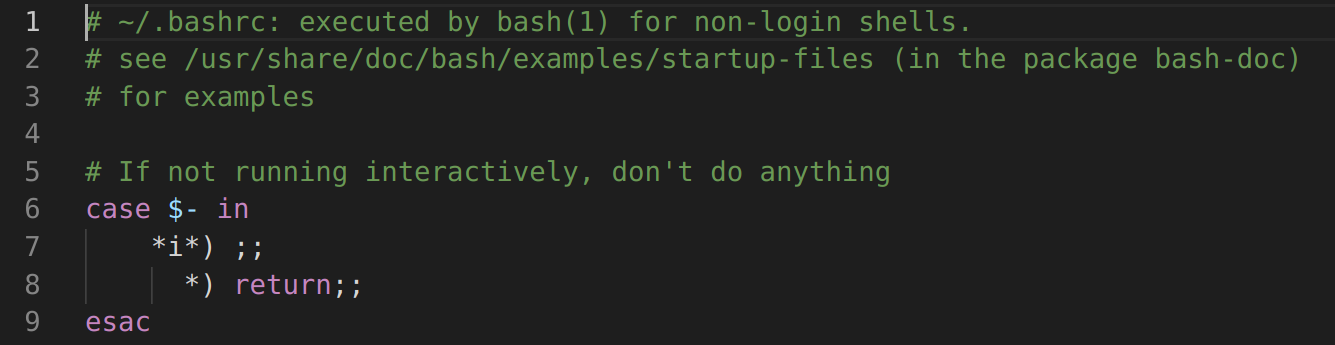
图2 .bashrc文件中要注释的行。(第6至9行)↑
在每台计算机上使用以下命令检查是否启用了多播功能。
cat /proc/sys/net/ipv4/icmp_echo_ignore_broadcasts
在每台计算机上使用以下命令暂时启用多播功能。
sudo sh -c "echo 0 > /proc/sys/net/ipv4/icmp_echo_ignore_broadcasts"
要永久启用多播功能,请编辑/etc/sysctl.conf文件,添加以下行。
net.ipv4.icmp_echo_ignore_broadcasts=0
并使用以下命令重新启动相关服务。
sudo service procps restart
使用此命令显示当前定义的多播组。通常,应该有一个224.0.0.1组。
使用此命令查看是否所有计算机都响应广播。
1.4测试多主ROS网络的可用性
在C0上启动roscore,然后启动master_discovery节点。终端输出如图3所示。
rosrun master_discovery_fkie master_discovery _mcast_group:=224.0.0.1
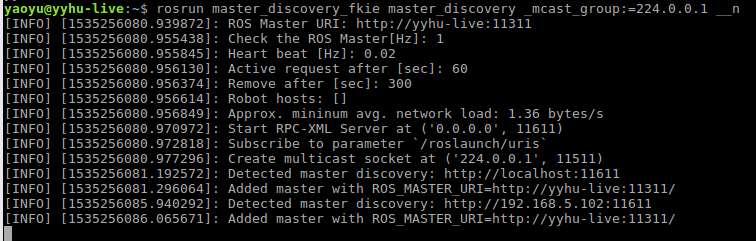
图3在C0上启动master_discovery节点后的终端输出。↑
在C1上,请使用不同的节点名称启动相同的节点。(参考。)
rosrun master_discovery_fkie master_discovery _mcast_group:=224.0.0.1 __name:=master_discovery_ai
注意:name参数前有两个下划线。
如果节点名称相同,则C0将抱怨这种情况并自行终止。
在C0上启动master_sync节点(终端输出如图4所示)。
rosrun master_sync_fkie master_sync

图4启动master_sync节点号C0后的终端输出。↑
在C1上,启动具有不同节点名的 master_sync节点。
rosrun master_sync_fkie master_sync __name:=master_sync_ai
目前,每个master_sync节点都应打印同步信息。此信息将在几秒钟的间隔内刷新。
通过每台计算机上的“ rostopic列表”和“ rosnode列表”列出当前主题和节点,应该会看到相同的结果。如图5所示。
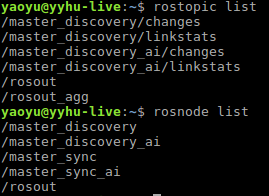
图5主题和节点列表。在C0上执行。↑
如果一切正常,现在让我们尝试发布和订阅真实数据。在两台计算机中的任何一台上,使用以下命令启动一个匿名节点。
rostopic pub -r 1 /test std_msgs/Int32 1
上面的命令将启动一个匿名节点,并发布一个名称为“ / test”的主题。此节点每秒将发布一个Int32类型值1。现在使用“ rostopic列表”和“ rosnode列表”查看新主题和节点是否存在。结果将类似于图6。
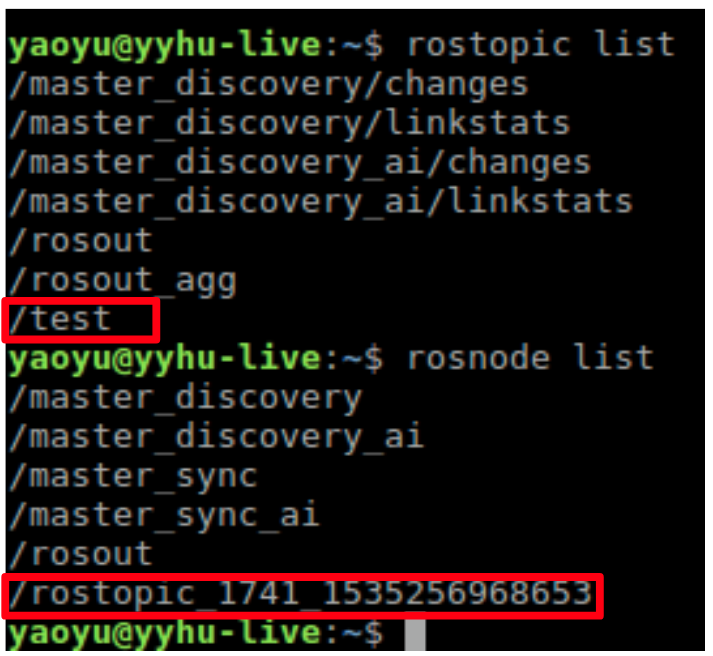
图6新的匿名节点。↑
如果/ test在C1上,请使用
在C0上查看C0是否真的可以接收任何实际数据。结果如图7所示。
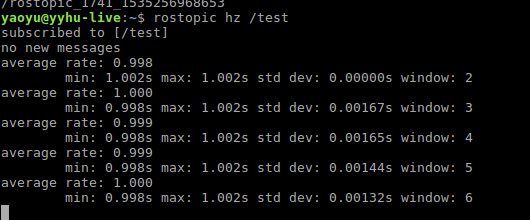
图7对ROS主题的频率测试。↑
2个node_manager GUI
现在,我们已经配置了一个有效的多主ROS网络,我们可以使用node_manager GUI可视化ROS网络中节点的信息并与这些节点进行交互。
2.1准备一个测试ROS节点
我们将测试node_manager的一些功能,这需要一个示例ROS节点才能使用。
创建一个简单的ROS节点。该节点将仅每秒发布一次字符串消息。该节点是用Python编写的,应该准备启动文件。关联的ROS软件包称为“ test_pub”,而Python脚本称为“ simple_pub.py”。脚本和启动文件可以在这里找到。
由于node_manager严重依赖于名为“ screen”的工具,因此我们必须将其安装在系统中。
目前,任何ROS节点都应在“屏幕”中启动。node_manager假定“屏幕”具有与ROS节点的“名称”相关联的特定“名称”。在“屏幕”中启动ROS节点时,我们必须明确指定“屏幕名称”和“ ROS节点名称”。以test_pub包为例,我们使用以下命令启动其ROS节点(由于已配置了系统范围的ROS_MASTER_URI,因此需要在C0上运行roscore)。
screen -S _simple_pub_launch -dm roslaunch test_pub simple_pub.launch
其中,“ screen”的-S参数指定“ screen”的名称,而“ screen”的-dm参数告诉“ screen”以分离模式启动,并执行指定为其余命令行参数的命令。注意,-S参数和“屏幕”的名称之间有一个空格字符。一旦发出此命令,就可以使用
查看启动是否正常以及“屏幕”的名称是否正确设置。
将此示例节点存储在C1上,以备后用。
2.2测试node_manager
现在,停止C0和C1上所有正在运行的节点,让roscore在C0上运行。在C0上,通过以下方式启动node_manager
如图8所示,将显示node_manager的GUI。
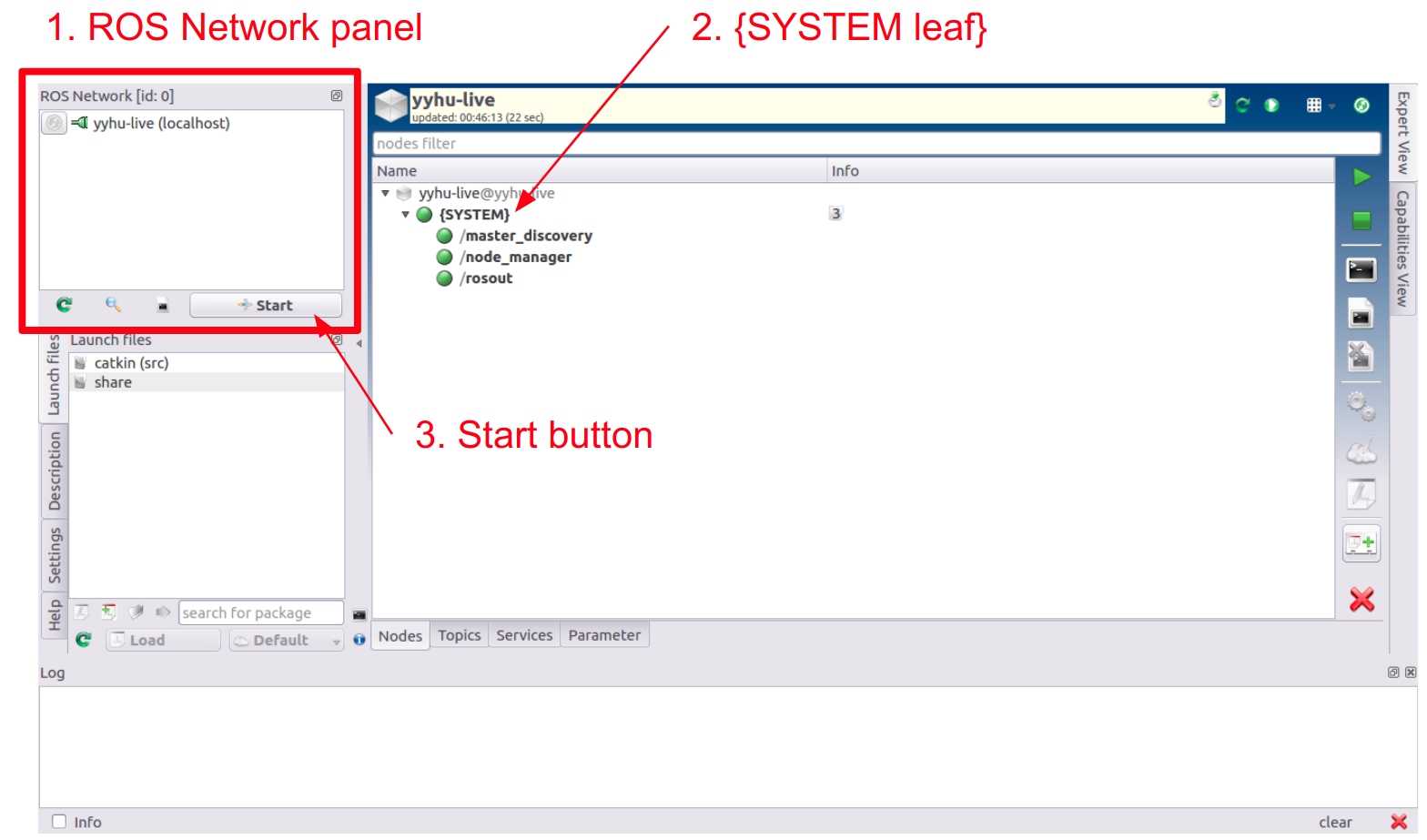
图8 node_manager。↑
目前,“ ROS网络”面板(左上角,图8中的#1)显示没有启用的网络。这是因为网络中没有运行master_discovery节点。在“ {SYSTEM}”叶(图8中的#2)下,只有其他两个ROS节点在运行。我们通过单击“ ROS网络”面板上的“开始”按钮(图8中的#3)来启用网络。然后,我们将看到“开始发现”对话框窗口,如图9所示。
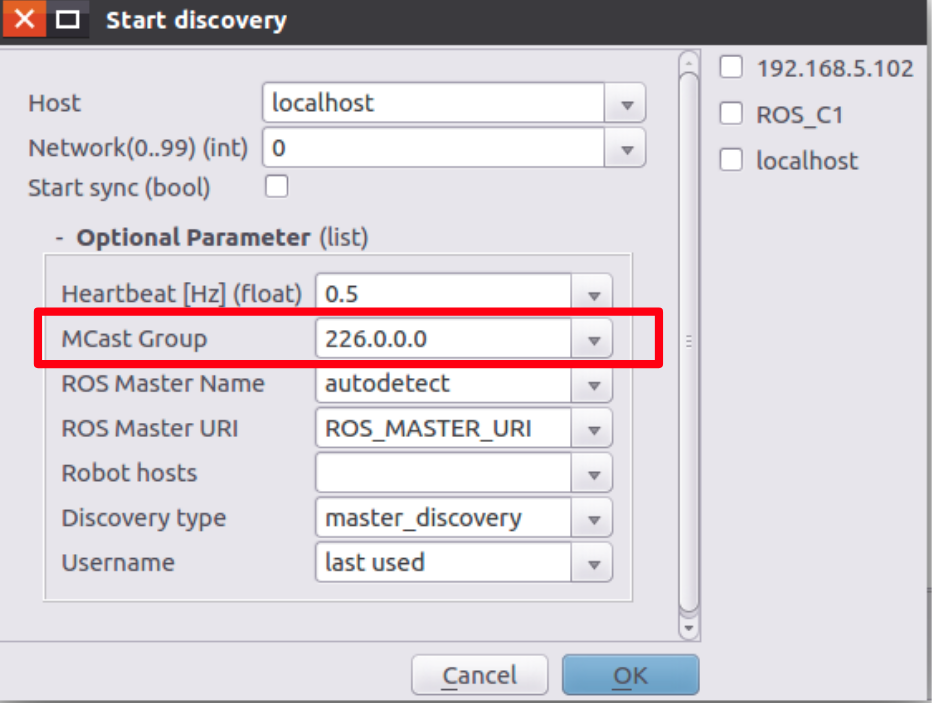
图9“开始发现”对话框窗口。↑
将所有内容保留为默认值(“ MCast组”除外),然后单击“确定”。一个新的master_discovery节点(图10中的#1)将显示在{SYSTEM}叶子下,而新启用的ROS网络id:0将显示在“ ROS Network”面板中(图10中的#2)。图10显示了此视图。
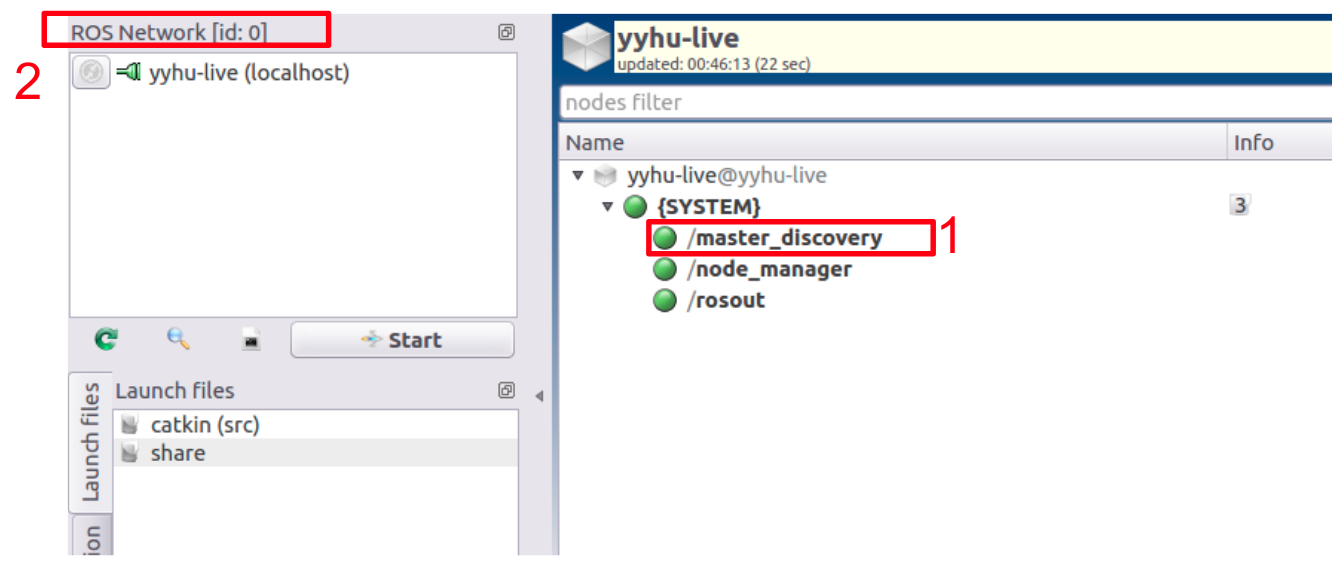
图10 master_discovery节点已启动。↑
现在,我们可以使用图11(#1)中所示的按钮启动master_sync节点。
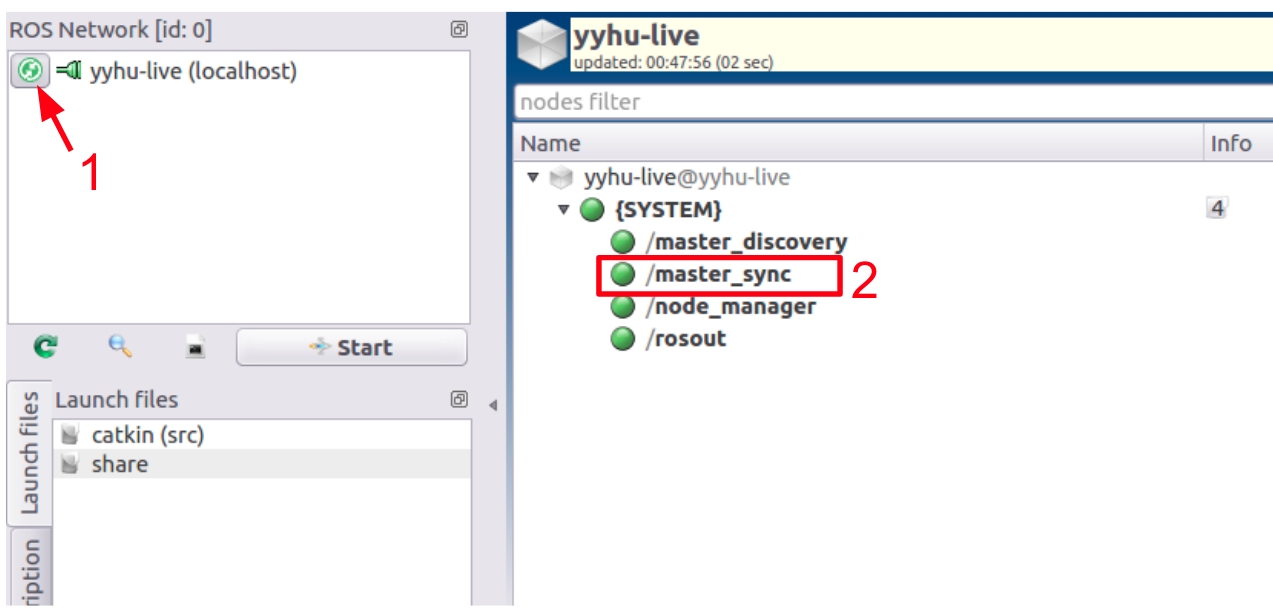
图11在node_manager中启动master_sync节点。↑
然后,此按钮更改其颜色,并启动一个新的master_sync节点(图11中的#2)。
为了让ROS网络发现新的客户端,我们必须在客户端上手动启动master_discovery节点,本例中为C1。在C1上,使用“其他”节点名称在“屏幕”内启动新的master_discovery节点。如图12所示,我们将看到C1的信息。
screen -S _master_discovery_ai -dm rosrun master_discovery_fkie master_discovery _mcast_group:=224.0.0.1 __name:=master_discovery_ai
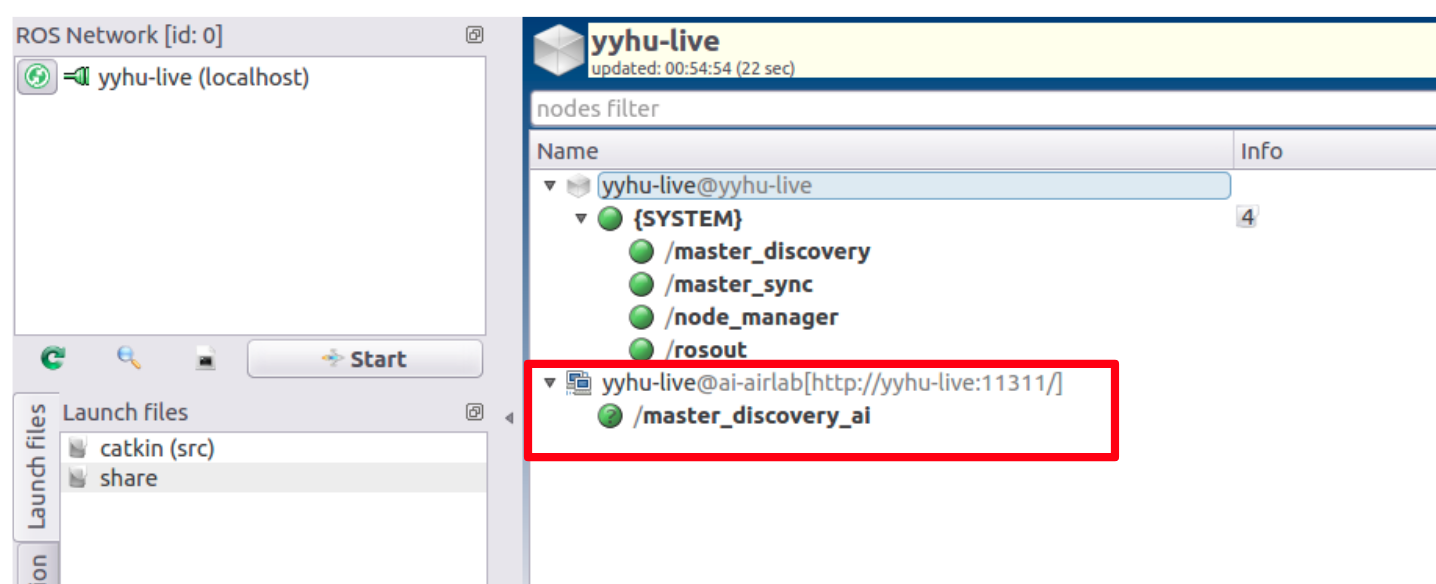
图12 master_discovery节点在远程客户端上启动。↑
如果master_discovery节点成功启动,我们可以在node_manager中看到其信息。
现在我们可以通过以下方式在C1上启动示例节点
screen -S _simple_pub_launch -dm roslaunch test_pub simple_pub.launch
启动后,C0上的node_manager将显示其信息,如图13(#1)所示。
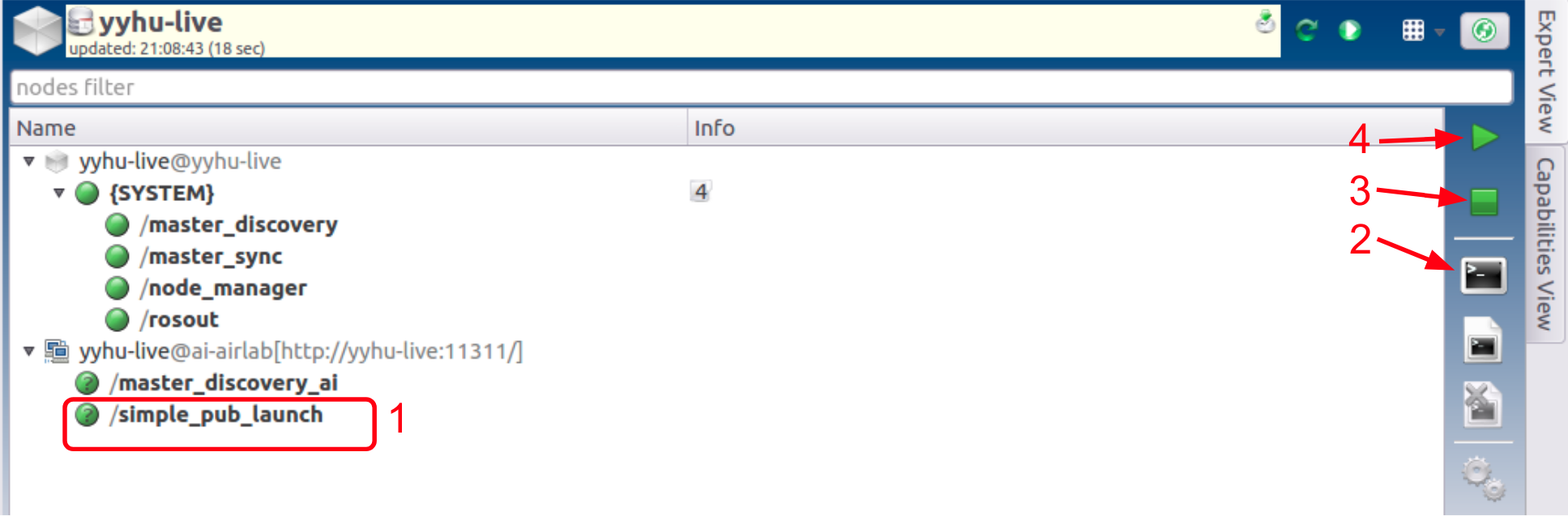
图13在远程计算机上启动的/ simple_pub_launch节点。↑
我们可以使用node_manager提供的工具(图13中的#2)在C0上打开SSH会话,以访问在C1上运行的“屏幕”。选择“ yyhu-live @ ai-airlab [http:// yyhu-live:11311 /]”下的任何节点,单击按钮(图13中的#2),或使用快捷方式“ F3”启动到SSH会话。包含该节点的“屏幕”。将弹出一个对话框,如图14所示,以请求SSH会话的用户名和密码。用户可能必须在打开的SSH会话中第二次输入他/她的密码。
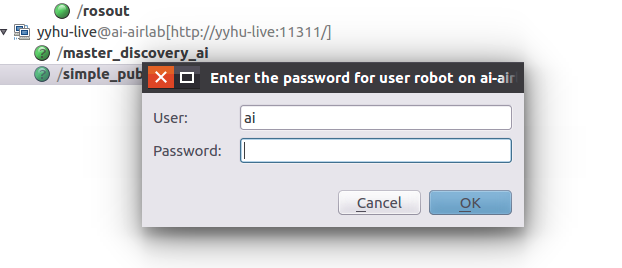
图14 SSH登录对话框。↑
使用“ Ctrl + a,d”分离并关闭此窗口。
在C1上,用户可以使用
签出“屏幕”列表。
在C0上,用户可以通过单击node_manager的GUI左侧的“停止选择的服务”按钮(图13中的#3)来停止/ simple_pub_launch节点。单击后,将终止C1上的“屏幕”进程,命令“ rosnode list”将不显示/ simple_pub_launch的迹象。
2.3 default_cfg
现在,用户仍然必须手动在C1上(在“屏幕”中)启动ROS节点,以使node_manager看到并与其交互。实际上,multimaster_fkie提供了一种在远程客户端中启动节点的方法。这是通过default_cfg节点实现的。
default_cfg节点需要启动文件。在该启动文件中,用户列出了他/她希望让C0上的node_manager管理的所有节点。default_cfg节点提供了一些其他功能,例如自动启动和重生,延迟启动和条件启动。鼓励用户查看官方文档以了解所有可能的功能。
使用我们的test_pub包,我们为default_cfg组成了一个新的启动文件,如图15所示。

图15 default_cfg节点的test_pub启动文件。↑
请注意,我们为simple_pub_launch节点(在此启动文件中配置的ROS节点名称)配置了延迟的自动启动。然后,我们准备了另一个启动文件,如图16所示,用于启动default_cfg本身(文件名为“ default_cfg_test.launch”) )。
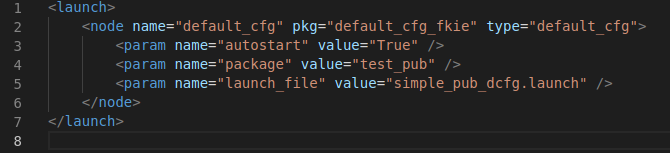
图16启动文件以启动default_cfg本身。↑
在此启动文件中,我们启用了自动启动功能,并告知defualt_cfg要启动的节点的信息。然后,我们可以像往常一样使用“屏幕”启动default_cfg。
<span style="color:#111111"><code>screen -S _default_cfg -dm roslaunch default_cfg_fkie default_cfg_test.launch
</code></span>
然后如图17所示,在C0上,我们可以看到有两个新节点被启动。
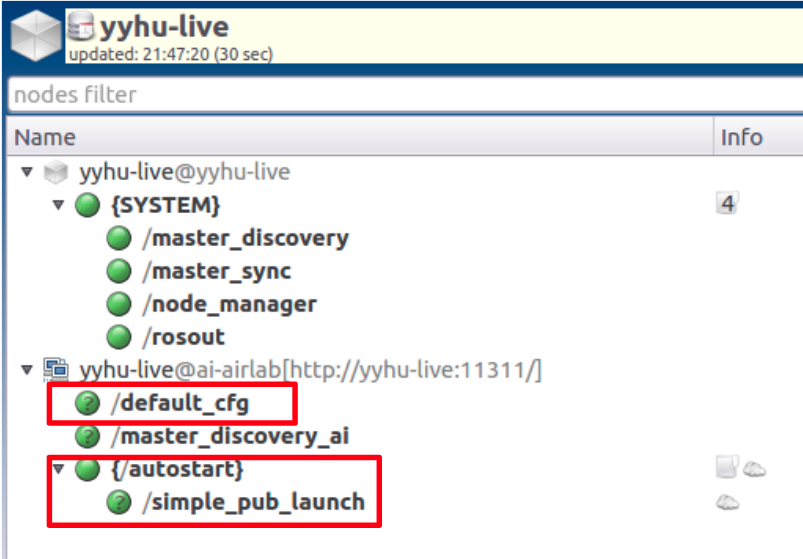
图17在远程客户端上启动的defult_cfg。↑
如果我们可以快速操作计算机(或设置较大的延迟时间来自动启动),则可以看到/ simple_pub节点在请求的延迟后被启动,如图15所示的启动文件中所示。
现在,用户可以通过单击C0上的node_manager的“开始选择的服务”和“停止选择的服务”按钮(图13中的#4和#3)来停止或重新启动ROS节点,以远程控制该节点。
2.4其他
要停止整个ROS网络,请退出node_manager,并停止roscore,请使用节点面板(较大的红叉)上的红叉按钮(请参见图18)。单击后,“ Close / Stop / Shutdown”(关闭/停止/关闭)对话框将显示在最前面,如图19所示。选择“ stop ROS”以同时退出roscore。请注意,选择“关闭主机”将关闭C0计算机。
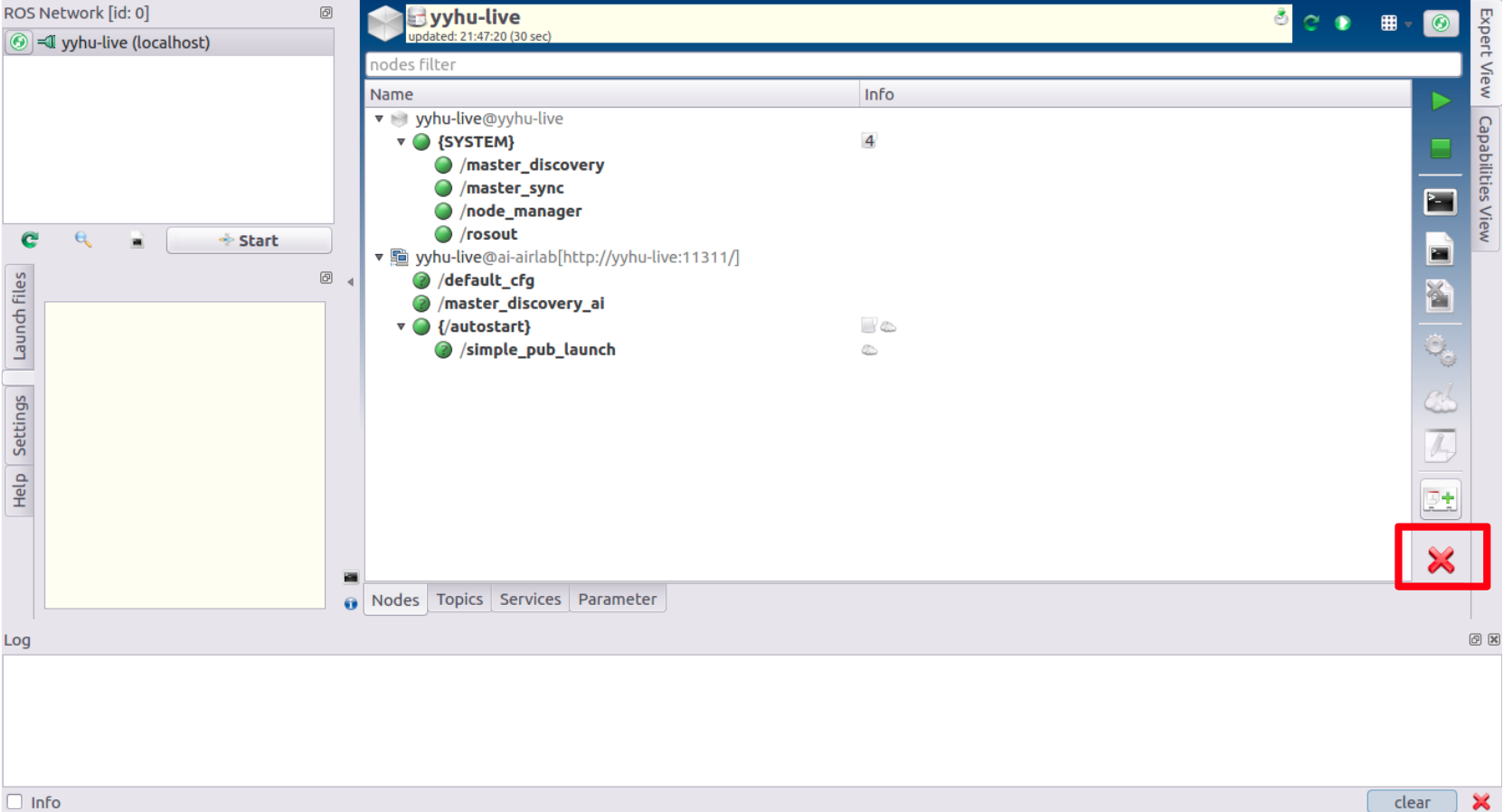
图18较大的红叉。↑
图19“关闭/停止/关闭”对话框。↑