目录
一,点云读取
二,点云写入
二,点云显示
三、 open3d支持如下点云文件类型
四、代码及结果示例
一,点云读取
read_point_cloud(filename, format='auto', remove_nan_points=True, remove_infinite_points=True, print_progress=False):
参数:
-
filename (str): 点云文件路径
-
format (str, optional, default='auto'): 输入文件格式filehe的路径。 如果未指定或设置为“auto”,则从文件扩展名推断格式
-
remove_nan_points (bool, optional, default=False): 如果True,所有包含NaN的点都将从PointCloud中删除。
-
remove_infinite_points (bool, optional, default=False): 如果为True,所有包含无限值的点都将从PointCloud中删除
-
print_progress (bool, optional, default=False): 如果设置为true,控制台中会显示一个进度条
返回:
- open3d.geometry.PointCloud
默认情况下,Open3D尝试通过文件名扩展名推断文件类型。
pcd = o3d.io.read_point_cloud("../../test_data/my_points.txt", format='xyz')
也可以显式地指定文件类型。 在这种情况下,文件扩展名将被忽略。
二,点云写入
write_point_cloud(filename, pointcloud, write_ascii=False, compressed=False, print_progress=False)
参数:
-
filename (str): 点云文件保存路径名.
-
pointcloud (open3d.geometry.PointCloud): 目标点云
-
compressed (bool, optional, default=False): 设置为' ' True ' '以压缩格式写入。
- print_progress (bool, optional, default=False):如果设置为true,控制台中会显示一个进度条
返回:
保存一个点云(o3d.pcd)到本地文件
二,点云显示
draw_geometries(window_name='Open3D', width=1920, height=1080, left=50, top=50, point_show_normal=False, mesh_show_wireframe=False, mesh_show_back_face, *args, **kwargs):
参数:
-
geometry_list (List[open3d.geometry.Geometry]): 可视化点云列表。
-
window_name (str, optional, default='Open3D'): 可视化窗口名称。
-
width (int, optional, default=1920): 可视化窗口宽
-
height (int, optional, default=1080): 可视化窗口高
-
left (int, optional, default=50): 可视化窗口左边距
-
top (int, optional, default=50): 可视化窗口上边距
-
point_show_normal (bool, optional, default=False): 如果设置为True,可视化点的法向量。
-
mesh_show_wireframe (bool, optional, default=False): 如果设置为true,可视化网格线框。
-
mesh_show_back_face (bool, optional, default=False): 可视化网格三角形背面。
返回:
三、 open3d支持如下点云文件类型
| Format |
Description |
| xyz
|
每行包含[x, y, z], 其中 x, y, z 分别是三维坐标
|
| xyzn
|
每行包含[x, y, z, nx, ny, nz], 其中 nx, ny, nz 是法向量
|
| xyzrgb
|
每行包含 [x, y, z, r, g, b], 其中r, g, b 是[0, 1]的float数据 |
| pts
|
第一行是点数. 接下来的行遵循如下其中一种格式:[x, y, z, i, r, g, b], [x, y, z, r, g, b], [x, y, z, i] or [x, y, z], 其中x, y, z, i 是 double类型 ,r, g, b 是 uint8类型 |
| ply
|
见 多边形格式, ply文件可以包含点云和mesh网格数据 |
| pcd
|
见 点云数据 |
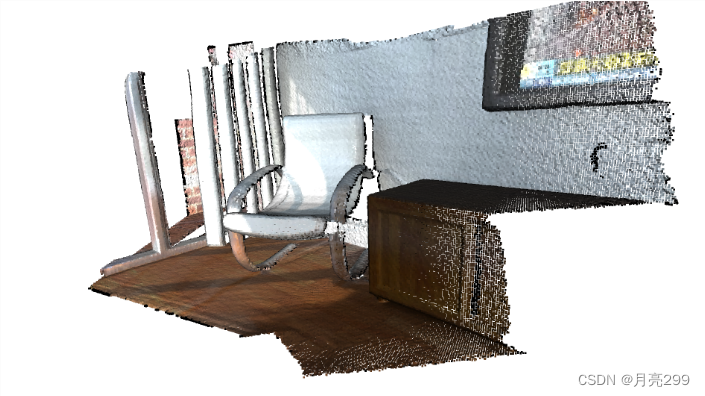
四、代码及结果示例
import open3d as o3d
import numpy as np
print("Load a ply point cloud, print it, and render it")
# ply_point_cloud = o3d.data.PLYPointCloud()
plyname = r'fragment.ply'
#读点云
pcd = o3d.io.read_point_cloud(plyname)
print(pcd)
print(np.asarray(pcd.points))
#点云显示
o3d.visualization.draw_geometries([pcd],
zoom=0.3412,
front=[0.4257, -0.2125, -0.8795],
lookat=[2.6172, 2.0475, 1.532],
up=[-0.0694, -0.9768, 0.2024])
#保存点云
o3d.io.write_point_cloud("save.pcd", pcd)