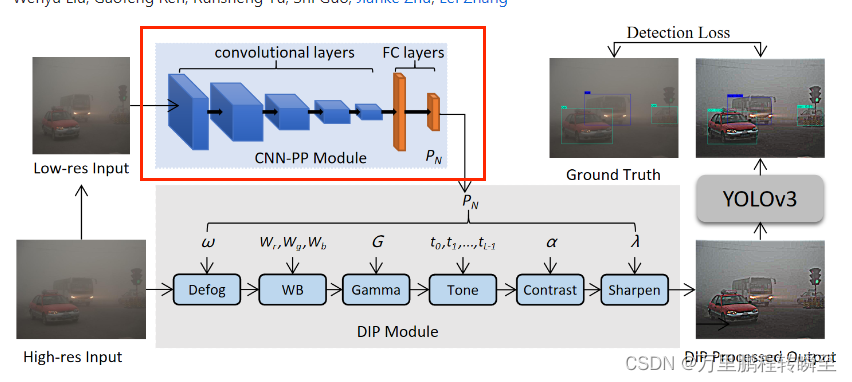
IA-YOLO项目源自论文Image-Adaptive YOLO for Object Detection in Adverse Weather Conditions,其提出端到端方式联合学习CNN-PP和YOLOv3,这确保了CNN-PP可以学习适当的DIP,以弱监督的方式增强图像检测。IA-YOLO方法可以自适应地处理正常和不利天气条件下的图像。阅读论文发现只介绍了IA-YOLO的实际效果,对DIP模块和CNN-PP介绍较少,故此查阅源码分析其实现。
通过分析发现,IA-YOLO使用filtered_image_batch 与 input_data_clean的mse loss优化CNN-PP模块的输出。故此可以看出CNN-PP | DIP实则是可以从IA-YOLO中剥离出来,单独作为数据优化模块使用,若需要考虑IA-YOLO项目的使用,应该对比研究其它图像增强模块。
解读IA-YOLO项目是为了将DIP模块单独拎出来使用,并添加到自己的目标检测模型中。由于博主管用pytorch,故没有对IA-YOLO项目中的代码进行运行,仅是按照运行逻辑对其核心部分进行抽取。
1、IA-YOLO项目的使用
1.1、安装命令
$ git clone https://github.com/wenyyu/Image-Adaptive-YOLO.git
$ cd Image-Adaptive-YOLO
# Require python3 and tensorflow
$ pip install -r ./docs/requirements.txt
1.2、相关数据集
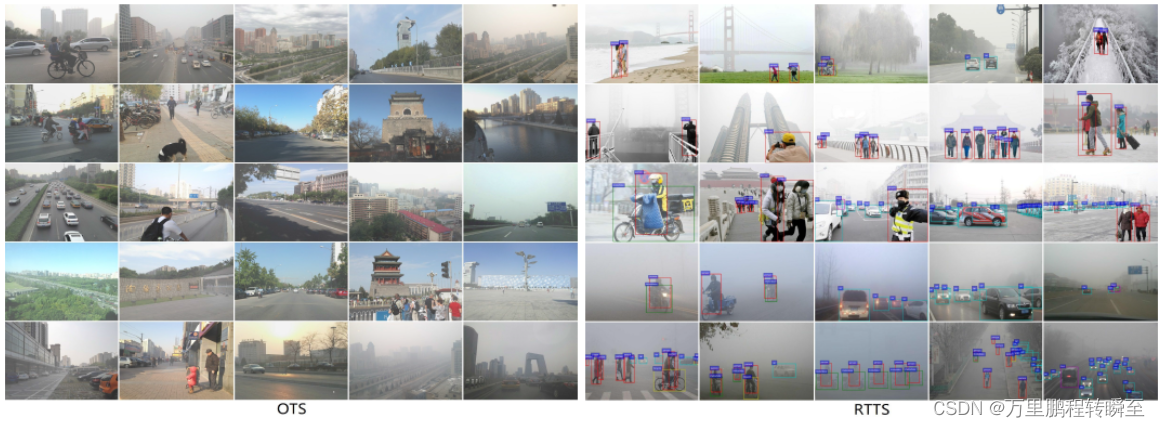
以下两个数据集是IA-YOLO使用到的外部数据集(其还使用了voc数据集和foggy_voc数据集)。
ExDark : https://github.com/cs-chan/Exclusively-Dark-Image-Dataset/tree/master/Dataset
RTTS: https://sites.google.com/view/reside-dehaze-datasets/reside-%CE%B2
1.3 基本使用
Train and Evaluate on the datasets
- Download VOC PASCAL trainval and test data
$ wget http://host.robots.ox.ac.uk/pascal/VOC/voc2007/VOCtrainval_06-Nov-2007.tar
$ wget http://host.robots.ox.ac.uk/pascal/VOC/voc2012/VOCtrainval_11-May-2012.tar
$ wget http://host.robots.ox.ac.uk/pascal/VOC/voc2007/VOCtest_06-Nov-2007.tar
Extract all of these tars into one directory and rename them, which should have the following basic structure.
VOC # path: /home/lwy/work/code/tensorflow-yolov3/data/VOC
├── test
| └──VOCdevkit
| └──VOC2007 (from VOCtest_06-Nov-2007.tar)
└── train
└──VOCdevkit
└──VOC2007 (from VOCtrainval_06-Nov-2007.tar)
└──VOC2012 (from VOCtrainval_11-May-2012.tar)
$ python scripts/voc_annotation.py
- Generate Voc_foggy_train and Voc_foggy_val dataset offline
# generate ten levels' foggy training images and val images, respectively
$ python ./core/data_make.py
- Edit core/config.py to configure
--vocfog_traindata_dir' = '/data/vdd/liuwenyu/data_vocfog/train/JPEGImages/'
--vocfog_valdata_dir' = '/data/vdd/liuwenyu/data_vocfog/val/JPEGImages/'
--train_path = './data/dataset_fog/voc_norm_train.txt'
--test_path = './data/dataset_fog/voc_norm_test.txt'
--class_name = './data/classes/vocfog.names'
- Train and Evaluate
$ python train.py # we trained our model from scratch.
$ python evaluate.py
$ cd ./experiments/.../mAP & python main.py
- More details of Preparing dataset or Train with your own dataset
reference the implementation tensorflow-yolov3.
2、CNN-PP与DIP模块实现
在IA-YOLO论文中提到了不少数据处理知识,如生成带雾图片、可微的DIP模块、CNN-PP模块等。这里主要介绍可微的DIP模块、CNN-PP模块的实现与训练
2.1 主体流程
如论文中所述,缩略图与原始图的清晰化参数是一样的,为节省计算量CNN-PP输入的是低分辨率的原始图像,其输出的参数用于DIP模块进行图像清晰化;而DIP模块则使用CNN-PP输出的参数优化图像,最后交给yolov3模型进行预测
2.2 主体代码
为了便于进行对比实验,IA-YOLO通过在yolov3.py(包含去雾filter)或yolov3_lowlight.py(不包含去雾filter,对图像随机进行亮度处理)中使用isp_flag作为配置项目决定是否使用CNN-PP与DIP模块。代码示意如下:
#代码地址:https://github.com/wenyyu/Image-Adaptive-YOLO/blob/main/core/yolov3_lowlight.py
def __build_nework(self, input_data, isp_flag, input_data_clean):
filtered_image_batch = input_data
self.filter_params = input_data
filter_imgs_series = []
if isp_flag:
with tf.variable_scope('extract_parameters_2'):
input_data = tf.image.resize_images(input_data, [256, 256], method=tf.image.ResizeMethod.BILINEAR)#---------对原始图像进行下采样
filter_features = common.extract_parameters_2(input_data, cfg, self.trainable)#-----CNN-PP计算出DIP模块的参数
# filter_features = tf.random_normal([1, 10], 0.5, 0.1)
filters = cfg.filters
filters = [x(input_data, cfg) for x in filters]#-----生成DIP模块
filter_parameters = []
for j, filter in enumerate(filters):
with tf.variable_scope('filter_%d' % j):
print(' creating filter:', j, 'name:', str(filter.__class__), 'abbr.',
filter.get_short_name())
print(' filter_features:', filter_features.shape)
filtered_image_batch, filter_parameter = filter.apply(
filtered_image_batch, filter_features)#-----DIP模块中filter使用CNN-PP参数优化图像
filter_parameters.append(filter_parameter)
filter_imgs_series.append(filtered_image_batch)
print(' output:', filtered_image_batch.shape)
self.filter_params = filter_parameters
self.image_isped = filtered_image_batch
self.filter_imgs_series = filter_imgs_series
recovery_loss = tf.reduce_sum(tf.pow(filtered_image_batch - input_data_clean, 2.0))#/(2.0 * batch_size)
#正常的yolov3代码训练使用流程
input_data = filtered_image_batch
在if isp_flag:内的代码简单介绍了CNN-DIP模块和DIP模块的使用
在if isp_flag:外的代码为正常的yolov3训练代码。
2.3 CNN-PP模块的实现
完整代码:https://github.com/wenyyu/Image-Adaptive-YOLO/blob/main/core/common.py
def extract_parameters_2(net, cfg, trainable):
output_dim = cfg.num_filter_parameters
# net = net - 0.5
min_feature_map_size = 4
print('extract_parameters_2 CNN:')
channels = 16
print(' ', str(net.get_shape()))
net = convolutional(net, filters_shape=(3, 3, 3, channels), trainable=trainable, name='ex_conv0',
downsample=True, activate=True, bn=False)
net = convolutional(net, filters_shape=(3, 3, channels, 2*channels), trainable=trainable, name='ex_conv1',
downsample=True, activate=True, bn=False)
net = convolutional(net, filters_shape=(3, 3, 2*channels, 2*channels), trainable=trainable, name='ex_conv2',
downsample=True, activate=True, bn=False)
net = convolutional(net, filters_shape=(3, 3, 2*channels, 2*channels), trainable=trainable, name='ex_conv3',
downsample=True, activate=True, bn=False)
net = convolutional(net, filters_shape=(3, 3, 2*channels, 2*channels), trainable=trainable, name='ex_conv4',
downsample=True, activate=True, bn=False)
net = tf.reshape(net, [-1, 2048])
features = ly.fully_connected(
net,
64,
scope='fc1',
activation_fn=lrelu,
weights_initializer=tf.contrib.layers.xavier_initializer())
filter_features = ly.fully_connected(
features,
output_dim,
scope='fc2',
activation_fn=None,
weights_initializer=tf.contrib.layers.xavier_initializer())
return filter_features
查阅代码,可预见CNN-DIP为一个普通的CNN网络,其输出结构由cfg.num_filter_parameters所决定,具体值为14(不包含去雾filter)或15(包含去雾filter)

此外,在config.py中定义了一些其他DIP、CNN-PP参数项
cfg.filters = [
DefogFilter, ImprovedWhiteBalanceFilter, GammaFilter,
ToneFilter, ContrastFilter, UsmFilter
]
cfg.num_filter_parameters = 15
cfg.defog_begin_param = 0
cfg.wb_begin_param = 1
cfg.gamma_begin_param = 4
cfg.tone_begin_param = 5
cfg.contrast_begin_param = 13
cfg.usm_begin_param = 14
cfg.curve_steps = 8
cfg.gamma_range = 3
cfg.exposure_range = 3.5
cfg.wb_range = 1.1
cfg.color_curve_range = (0.90, 1.10)
cfg.lab_curve_range = (0.90, 1.10)
cfg.tone_curve_range = (0.5, 2)
cfg.defog_range = (0.1, 1.0)
cfg.usm_range = (0.0, 5)
# Masking is DISABLED
cfg.masking = False
cfg.minimum_strength = 0.3
cfg.maximum_sharpness = 1
cfg.clamp = False
###########################################################################
# CNN Parameters
###########################################################################
cfg.source_img_size = 64
cfg.base_channels = 32
cfg.dropout_keep_prob = 0.5
# G and C use the same feed dict?
cfg.share_feed_dict = True
cfg.shared_feature_extractor = True
cfg.fc1_size = 128
cfg.bnw = False
# number of filters for the first convolutional layers for all networks
# (stochastic/deterministic policy, critic, value)
cfg.feature_extractor_dims = 4096
2.4 DIP模块的实现
DIP模块实质为堆叠的可微分滤波器,其实现功能包括 Defog、白平衡(WB)、伽玛、对比度、Tone 和Sharpen,其是实现代码主要在filters.py中,部分辅助代码在util_filters.py中 在作者实现中有filters.py和filters_lowlight.py,二者没有本质区别,filters.py为包含去雾参数的filer(代码中有部分注释未删除),而filters_lowlight.py为后期更新代码实现了不包含去雾参数的filer(删除了原有的注释)
下面代码中部分用到了tf的api来处理图像,但其所有的Filter子类均非tf.layer对象,使用tf——api处理图像只为了实现对CNN-PP输出结果的可微分
import tensorflow as tf
import numpy as np
import tensorflow.contrib.layers as ly
from util_filters import lrelu, rgb2lum, tanh_range, lerp
import cv2
import math
class Filter:
def __init__(self, net, cfg):
self.cfg = cfg
# self.height, self.width, self.channels = list(map(int, net.get_shape()[1:]))
# Specified in child classes
self.num_filter_parameters = None
self.short_name = None
self.filter_parameters = None
def get_short_name(self):
assert self.short_name
return self.short_name
def get_num_filter_parameters(self):
assert self.num_filter_parameters
return self.num_filter_parameters
def get_begin_filter_parameter(self):
return self.begin_filter_parameter
def extract_parameters(self, features):
# output_dim = self.get_num_filter_parameters(
# ) + self.get_num_mask_parameters()
# features = ly.fully_connected(
# features,
# self.cfg.fc1_size,
# scope='fc1',
# activation_fn=lrelu,
# weights_initializer=tf.contrib.layers.xavier_initializer())
# features = ly.fully_connected(
# features,
# output_dim,
# scope='fc2',
# activation_fn=None,
# weights_initializer=tf.contrib.layers.xavier_initializer())
return features[:, self.get_begin_filter_parameter():(self.get_begin_filter_parameter() + self.get_num_filter_parameters())], \
features[:, self.get_begin_filter_parameter():(self.get_begin_filter_parameter() + self.get_num_filter_parameters())]
# Should be implemented in child classes
def filter_param_regressor(self, features):
assert False
# Process the whole image, without masking
# Should be implemented in child classes
def process(self, img, param, defog, IcA):
assert False
def debug_info_batched(self):
return False
def no_high_res(self):
return False
# Apply the whole filter with masking
def apply(self,
img,
img_features=None,
defog_A=None,
IcA=None,
specified_parameter=None,
high_res=None):
assert (img_features is None) ^ (specified_parameter is None)
if img_features is not None:
filter_features, mask_parameters = self.extract_parameters(img_features)
filter_parameters = self.filter_param_regressor(filter_features)
else:
assert not self.use_masking()
filter_parameters = specified_parameter
mask_parameters = tf.zeros(
shape=(1, self.get_num_mask_parameters()), dtype=np.float32)
if high_res is not None:
# working on high res...
pass
debug_info = {}
# We only debug the first image of this batch
if self.debug_info_batched():
debug_info['filter_parameters'] = filter_parameters
else:
debug_info['filter_parameters'] = filter_parameters[0]
# self.mask_parameters = mask_parameters
# self.mask = self.get_mask(img, mask_parameters)
# debug_info['mask'] = self.mask[0]
#low_res_output = lerp(img, self.process(img, filter_parameters), self.mask)
low_res_output = self.process(img, filter_parameters, defog_A, IcA)
if high_res is not None:
if self.no_high_res():
high_res_output = high_res
else:
self.high_res_mask = self.get_mask(high_res, mask_parameters)
# high_res_output = lerp(high_res,
# self.process(high_res, filter_parameters, defog, IcA),
# self.high_res_mask)
else:
high_res_output = None
#return low_res_output, high_res_output, debug_info
return low_res_output, filter_parameters
def use_masking(self):
return self.cfg.masking
def get_num_mask_parameters(self):
return 6
# Input: no need for tanh or sigmoid
# Closer to 1 values are applied by filter more strongly
# no additional TF variables inside
def get_mask(self, img, mask_parameters):
if not self.use_masking():
print('* Masking Disabled')
return tf.ones(shape=(1, 1, 1, 1), dtype=tf.float32)
else:
print('* Masking Enabled')
with tf.name_scope(name='mask'):
# Six parameters for one filter
filter_input_range = 5
assert mask_parameters.shape[1] == self.get_num_mask_parameters()
mask_parameters = tanh_range(
l=-filter_input_range, r=filter_input_range,
initial=0)(mask_parameters)
size = list(map(int, img.shape[1:3]))
grid = np.zeros(shape=[1] + size + [2], dtype=np.float32)
shorter_edge = min(size[0], size[1])
for i in range(size[0]):
for j in range(size[1]):
grid[0, i, j,
0] = (i + (shorter_edge - size[0]) / 2.0) / shorter_edge - 0.5
grid[0, i, j,
1] = (j + (shorter_edge - size[1]) / 2.0) / shorter_edge - 0.5
grid = tf.constant(grid)
# Ax + By + C * L + D
inp = grid[:, :, :, 0, None] * mask_parameters[:, None, None, 0, None] + \
grid[:, :, :, 1, None] * mask_parameters[:, None, None, 1, None] + \
mask_parameters[:, None, None, 2, None] * (rgb2lum(img) - 0.5) + \
mask_parameters[:, None, None, 3, None] * 2
# Sharpness and inversion
inp *= self.cfg.maximum_sharpness * mask_parameters[:, None, None, 4,
None] / filter_input_range
mask = tf.sigmoid(inp)
# Strength
mask = mask * (
mask_parameters[:, None, None, 5, None] / filter_input_range * 0.5 +
0.5) * (1 - self.cfg.minimum_strength) + self.cfg.minimum_strength
print('mask', mask.shape)
return mask
# def visualize_filter(self, debug_info, canvas):
# # Visualize only the filter information
# assert False
def visualize_mask(self, debug_info, res):
return cv2.resize(
debug_info['mask'] * np.ones((1, 1, 3), dtype=np.float32),
dsize=res,
interpolation=cv2.cv2.INTER_NEAREST)
def draw_high_res_text(self, text, canvas):
cv2.putText(
canvas,
text, (30, 128),
cv2.FONT_HERSHEY_SIMPLEX,
0.8, (0, 0, 0),
thickness=5)
return canvas
class ExposureFilter(Filter):#gamma_param is 2*exposure_range + exposure_range
def __init__(self, net, cfg):
Filter.__init__(self, net, cfg)
self.short_name = 'E'
self.begin_filter_parameter = cfg.exposure_begin_param
self.num_filter_parameters = 1
def filter_param_regressor(self, features):
return tanh_range(
-self.cfg.exposure_range, self.cfg.exposure_range, initial=0)(features)
def process(self, img, param, defog, IcA):
return img * tf.exp(param[:, None, None, :] * np.log(2))
# def visualize_filter(self, debug_info, canvas):
# exposure = debug_info['filter_parameters'][0]
# if canvas.shape[0] == 64:
# cv2.rectangle(canvas, (8, 40), (56, 52), (1, 1, 1), cv2.FILLED)
# cv2.putText(canvas, 'EV %+.2f' % exposure, (8, 48),
# cv2.FONT_HERSHEY_SIMPLEX, 0.3, (0, 0, 0))
# else:
# self.draw_high_res_text('Exposure %+.2f' % exposure, canvas)
class UsmFilter(Filter):#Usm_param is in [Defog_range]
def __init__(self, net, cfg):
Filter.__init__(self, net, cfg)
self.short_name = 'UF'
self.begin_filter_parameter = cfg.usm_begin_param
self.num_filter_parameters = 1
def filter_param_regressor(self, features):
return tanh_range(*self.cfg.usm_range)(features)
def process(self, img, param, defog_A, IcA):
def make_gaussian_2d_kernel(sigma, dtype=tf.float32):
radius = 12
x = tf.cast(tf.range(-radius, radius + 1), dtype=dtype)
k = tf.exp(-0.5 * tf.square(x / sigma))
k = k / tf.reduce_sum(k)
return tf.expand_dims(k, 1) * k
kernel_i = make_gaussian_2d_kernel(5)
print('kernel_i.shape', kernel_i.shape)
kernel_i = tf.tile(kernel_i[:, :, tf.newaxis, tf.newaxis], [1, 1, 1, 1])
# outputs = []
# for channel_idx in range(3):
# data_c = img[:, :, :, channel_idx:(channel_idx + 1)]
# data_c = tf.nn.conv2d(data_c, kernel_i, [1, 1, 1, 1], 'SAME')
# outputs.append(data_c)
pad_w = (25 - 1) // 2
padded = tf.pad(img, [[0, 0], [pad_w, pad_w], [pad_w, pad_w], [0, 0]], mode='REFLECT')
outputs = []
for channel_idx in range(3):
data_c = padded[:, :, :, channel_idx:(channel_idx + 1)]
data_c = tf.nn.conv2d(data_c, kernel_i, [1, 1, 1, 1], 'VALID')
outputs.append(data_c)
output = tf.concat(outputs, axis=3)
img_out = (img - output) * param[:, None, None, :] + img
# img_out = (img - output) * 2.5 + img
return img_out
class UsmFilter_sigma(Filter):#Usm_param is in [Defog_range]
def __init__(self, net, cfg):
Filter.__init__(self, net, cfg)
self.short_name = 'UF'
self.begin_filter_parameter = cfg.usm_begin_param
self.num_filter_parameters = 1
def filter_param_regressor(self, features):
return tanh_range(*self.cfg.usm_range)(features)
def process(self, img, param, defog_A, IcA):
def make_gaussian_2d_kernel(sigma, dtype=tf.float32):
radius = 12
x = tf.cast(tf.range(-radius, radius + 1), dtype=dtype)
k = tf.exp(-0.5 * tf.square(x / sigma))
k = k / tf.reduce_sum(k)
return tf.expand_dims(k, 1) * k
kernel_i = make_gaussian_2d_kernel(param[:, None, None, :])
print('kernel_i.shape', kernel_i.shape)
kernel_i = tf.tile(kernel_i[:, :, tf.newaxis, tf.newaxis], [1, 1, 1, 1])
# outputs = []
# for channel_idx in range(3):
# data_c = img[:, :, :, channel_idx:(channel_idx + 1)]
# data_c = tf.nn.conv2d(data_c, kernel_i, [1, 1, 1, 1], 'SAME')
# outputs.append(data_c)
pad_w = (25 - 1) // 2
padded = tf.pad(img, [[0, 0], [pad_w, pad_w], [pad_w, pad_w], [0, 0]], mode='REFLECT')
outputs = []
for channel_idx in range(3):
data_c = padded[:, :, :, channel_idx:(channel_idx + 1)]
data_c = tf.nn.conv2d(data_c, kernel_i, [1, 1, 1, 1], 'VALID')
outputs.append(data_c)
output = tf.concat(outputs, axis=3)
img_out = (img - output) * param[:, None, None, :] + img
return img_out
class DefogFilter(Filter):#Defog_param is in [Defog_range]
def __init__(self, net, cfg):
Filter.__init__(self, net, cfg)
self.short_name = 'DF'
self.begin_filter_parameter = cfg.defog_begin_param
self.num_filter_parameters = 1
def filter_param_regressor(self, features):
return tanh_range(*self.cfg.defog_range)(features)
def process(self, img, param, defog_A, IcA):
print(' defog_A:', img.shape)
print(' defog_A:', IcA.shape)
print(' defog_A:', defog_A.shape)
tx = 1 - param[:, None, None, :]*IcA
# tx = 1 - 0.5*IcA
tx_1 = tf.tile(tx, [1, 1, 1, 3])
return (img - defog_A[:, None, None, :])/tf.maximum(tx_1, 0.01) + defog_A[:, None, None, :]
class GammaFilter(Filter): #gamma_param is in [-gamma_range, gamma_range]
def __init__(self, net, cfg):
Filter.__init__(self, net, cfg)
self.short_name = 'G'
self.begin_filter_parameter = cfg.gamma_begin_param
self.num_filter_parameters = 1
def filter_param_regressor(self, features):
log_gamma_range = np.log(self.cfg.gamma_range)
return tf.exp(tanh_range(-log_gamma_range, log_gamma_range)(features))
def process(self, img, param, defog_A, IcA):
param_1 = tf.tile(param, [1, 3])
return tf.pow(tf.maximum(img, 0.0001), param_1[:, None, None, :])
# return img
# def visualize_filter(self, debug_info, canvas):
# gamma = debug_info['filter_parameters']
# cv2.rectangle(canvas, (8, 40), (56, 52), (1, 1, 1), cv2.FILLED)
# cv2.putText(canvas, 'G 1/%.2f' % (1.0 / gamma), (8, 48),
# cv2.FONT_HERSHEY_SIMPLEX, 0.3, (0, 0, 0))
class ImprovedWhiteBalanceFilter(Filter):
def __init__(self, net, cfg):
Filter.__init__(self, net, cfg)
self.short_name = 'W'
self.channels = 3
self.begin_filter_parameter = cfg.wb_begin_param
self.num_filter_parameters = self.channels
def filter_param_regressor(self, features):
log_wb_range = 0.5
mask = np.array(((0, 1, 1)), dtype=np.float32).reshape(1, 3)
# mask = np.array(((1, 0, 1)), dtype=np.float32).reshape(1, 3)
print(mask.shape)
assert mask.shape == (1, 3)
features = features * mask
color_scaling = tf.exp(tanh_range(-log_wb_range, log_wb_range)(features))
# There will be no division by zero here unless the WB range lower bound is 0
# normalize by luminance
color_scaling *= 1.0 / (
1e-5 + 0.27 * color_scaling[:, 0] + 0.67 * color_scaling[:, 1] +
0.06 * color_scaling[:, 2])[:, None]
return color_scaling
def process(self, img, param, defog, IcA):
return img * param[:, None, None, :]
# return img
# def visualize_filter(self, debug_info, canvas):
# scaling = debug_info['filter_parameters']
# s = canvas.shape[0]
# cv2.rectangle(canvas, (int(s * 0.2), int(s * 0.4)), (int(s * 0.8), int(
# s * 0.6)), list(map(float, scaling)), cv2.FILLED)
class ColorFilter(Filter):
def __init__(self, net, cfg):
Filter.__init__(self, net, cfg)
self.curve_steps = cfg.curve_steps
self.channels = int(net.shape[3])
self.short_name = 'C'
self.begin_filter_parameter = cfg.color_begin_param
self.num_filter_parameters = self.channels * cfg.curve_steps
def filter_param_regressor(self, features):
color_curve = tf.reshape(
features, shape=(-1, self.channels,
self.cfg.curve_steps))[:, None, None, :]
color_curve = tanh_range(
*self.cfg.color_curve_range, initial=1)(color_curve)
return color_curve
def process(self, img, param, defog, IcA):
color_curve = param
# There will be no division by zero here unless the color filter range lower bound is 0
color_curve_sum = tf.reduce_sum(param, axis=4) + 1e-30
total_image = img * 0
for i in range(self.cfg.curve_steps):
total_image += tf.clip_by_value(img - 1.0 * i / self.cfg.curve_steps, 0, 1.0 / self.cfg.curve_steps) * \
color_curve[:, :, :, :, i]
total_image *= self.cfg.curve_steps / color_curve_sum
return total_image
# def visualize_filter(self, debug_info, canvas):
# curve = debug_info['filter_parameters']
# height, width = canvas.shape[:2]
# for i in range(self.channels):
# values = np.array([0] + list(curve[0][0][i]))
# values /= sum(values) + 1e-30
# scale = 1
# values *= scale
# for j in range(0, self.cfg.curve_steps):
# values[j + 1] += values[j]
# for j in range(self.cfg.curve_steps):
# p1 = tuple(
# map(int, (width / self.cfg.curve_steps * j, height - 1 -
# values[j] * height)))
# p2 = tuple(
# map(int, (width / self.cfg.curve_steps * (j + 1), height - 1 -
# values[j + 1] * height)))
# color = []
# for t in range(self.channels):
# color.append(1 if t == i else 0)
# cv2.line(canvas, p1, p2, tuple(color), thickness=1)
class ToneFilter(Filter):
def __init__(self, net, cfg):
Filter.__init__(self, net, cfg)
self.curve_steps = cfg.curve_steps
self.short_name = 'T'
self.begin_filter_parameter = cfg.tone_begin_param
self.num_filter_parameters = cfg.curve_steps
def filter_param_regressor(self, features):
tone_curve = tf.reshape(
features, shape=(-1, 1, self.cfg.curve_steps))[:, None, None, :]
tone_curve = tanh_range(*self.cfg.tone_curve_range)(tone_curve)
return tone_curve
def process(self, img, param, defog, IcA):
# img = tf.minimum(img, 1.0)
# param = tf.constant([[0.52, 0.53, 0.55, 1.9, 1.8, 1.7, 0.7, 0.6], [0.52, 0.53, 0.55, 1.9, 1.8, 1.7, 0.7, 0.6],
# [0.52, 0.53, 0.55, 1.9, 1.8, 1.7, 0.7, 0.6], [0.52, 0.53, 0.55, 1.9, 1.8, 1.7, 0.7, 0.6],
# [0.52, 0.53, 0.55, 1.9, 1.8, 1.7, 0.7, 0.6], [0.52, 0.53, 0.55, 1.9, 1.8, 1.7, 0.7, 0.6]])
# param = tf.constant([[0.52, 0.53, 0.55, 1.9, 1.8, 1.7, 0.7, 0.6]])
# param = tf.reshape(
# param, shape=(-1, 1, self.cfg.curve_steps))[:, None, None, :]
tone_curve = param
tone_curve_sum = tf.reduce_sum(tone_curve, axis=4) + 1e-30
total_image = img * 0
for i in range(self.cfg.curve_steps):
total_image += tf.clip_by_value(img - 1.0 * i / self.cfg.curve_steps, 0, 1.0 / self.cfg.curve_steps) \
* param[:, :, :, :, i]
# p_cons = [0.52, 0.53, 0.55, 1.9, 1.8, 1.7, 0.7, 0.6]
# for i in range(self.cfg.curve_steps):
# total_image += tf.clip_by_value(img - 1.0 * i / self.cfg.curve_steps, 0, 1.0 / self.cfg.curve_steps) \
# * p_cons[i]
total_image *= self.cfg.curve_steps / tone_curve_sum
img = total_image
return img
# def visualize_filter(self, debug_info, canvas):
# curve = debug_info['filter_parameters']
# height, width = canvas.shape[:2]
# values = np.array([0] + list(curve[0][0][0]))
# values /= sum(values) + 1e-30
# for j in range(0, self.curve_steps):
# values[j + 1] += values[j]
# for j in range(self.curve_steps):
# p1 = tuple(
# map(int, (width / self.curve_steps * j, height - 1 -
# values[j] * height)))
# p2 = tuple(
# map(int, (width / self.curve_steps * (j + 1), height - 1 -
# values[j + 1] * height)))
# cv2.line(canvas, p1, p2, (0, 0, 0), thickness=1)
class VignetFilter(Filter):
def __init__(self, net, cfg):
Filter.__init__(self, net, cfg)
self.short_name = 'V'
self.begin_filter_parameter = cfg.vignet_begin_param
self.num_filter_parameters = 1
def filter_param_regressor(self, features):
return tf.sigmoid(features)
def process(self, img, param):
return img * 0 # + param[:, None, None, :]
def get_num_mask_parameters(self):
return 5
# Input: no need for tanh or sigmoid
# Closer to 1 values are applied by filter more strongly
# no additional TF variables inside
def get_mask(self, img, mask_parameters):
with tf.name_scope(name='mask'):
# Five parameters for one filter
filter_input_range = 5
assert mask_parameters.shape[1] == self.get_num_mask_parameters()
mask_parameters = tanh_range(
l=-filter_input_range, r=filter_input_range,
initial=0)(mask_parameters)
size = list(map(int, img.shape[1:3]))
grid = np.zeros(shape=[1] + size + [2], dtype=np.float32)
shorter_edge = min(size[0], size[1])
for i in range(size[0]):
for j in range(size[1]):
grid[0, i, j,
0] = (i + (shorter_edge - size[0]) / 2.0) / shorter_edge - 0.5
grid[0, i, j,
1] = (j + (shorter_edge - size[1]) / 2.0) / shorter_edge - 0.5
grid = tf.constant(grid)
# (Ax)^2 + (By)^2 + C
inp = (grid[:, :, :, 0, None] * mask_parameters[:, None, None, 0, None]) ** 2 + \
(grid[:, :, :, 1, None] * mask_parameters[:, None, None, 1, None]) ** 2 + \
mask_parameters[:, None, None, 2, None] - filter_input_range
# Sharpness and inversion
inp *= self.cfg.maximum_sharpness * mask_parameters[:, None, None, 3,
None] / filter_input_range
mask = tf.sigmoid(inp)
# Strength
mask *= mask_parameters[:, None, None, 4,
None] / filter_input_range * 0.5 + 0.5
if not self.use_masking():
print('* Masking Disabled')
mask = mask * 0 + 1
else:
print('* Masking Enabled')
print('mask', mask.shape)
return mask
# def visualize_filter(self, debug_info, canvas):
# brightness = float(debug_info['filter_parameters'][0])
# cv2.rectangle(canvas, (8, 40), (56, 52), (brightness, brightness,
# brightness), cv2.FILLED)
#
class ContrastFilter(Filter):
def __init__(self, net, cfg):
Filter.__init__(self, net, cfg)
self.short_name = 'Ct'
self.begin_filter_parameter = cfg.contrast_begin_param
self.num_filter_parameters = 1
def filter_param_regressor(self, features):
# return tf.sigmoid(features)
return tf.tanh(features)
def process(self, img, param, defog, IcA):
luminance = tf.minimum(tf.maximum(rgb2lum(img), 0.0), 1.0)
contrast_lum = -tf.cos(math.pi * luminance) * 0.5 + 0.5
contrast_image = img / (luminance + 1e-6) * contrast_lum
return lerp(img, contrast_image, param[:, :, None, None])
# return lerp(img, contrast_image, 0.5)
# def visualize_filter(self, debug_info, canvas):
# exposure = debug_info['filter_parameters'][0]
# cv2.rectangle(canvas, (8, 40), (56, 52), (1, 1, 1), cv2.FILLED)
# cv2.putText(canvas, 'Ct %+.2f' % exposure, (8, 48),
# cv2.FONT_HERSHEY_SIMPLEX, 0.3, (0, 0, 0))
class WNBFilter(Filter):
def __init__(self, net, cfg):
Filter.__init__(self, net, cfg)
self.short_name = 'BW'
self.begin_filter_parameter = cfg.wnb_begin_param
self.num_filter_parameters = 1
def filter_param_regressor(self, features):
return tf.sigmoid(features)
def process(self, img, param, defog, IcA):
luminance = rgb2lum(img)
return lerp(img, luminance, param[:, :, None, None])
# def visualize_filter(self, debug_info, canvas):
# exposure = debug_info['filter_parameters'][0]
# cv2.rectangle(canvas, (8, 40), (56, 52), (1, 1, 1), cv2.FILLED)
# cv2.putText(canvas, 'B&W%+.2f' % exposure, (8, 48),
# cv2.FONT_HERSHEY_SIMPLEX, 0.3, (0, 0, 0))
class LevelFilter(Filter):
def __init__(self, net, cfg):
Filter.__init__(self, net, cfg)
self.short_name = 'Le'
self.begin_filter_parameter = cfg.level_begin_param
self.num_filter_parameters = 2
def filter_param_regressor(self, features):
return tf.sigmoid(features)
def process(self, img, param):
lower = param[:, 0]
upper = param[:, 1] + 1
lower = lower[:, None, None, None]
upper = upper[:, None, None, None]
return tf.clip_by_value((img - lower) / (upper - lower + 1e-6), 0.0, 1.0)
# def visualize_filter(self, debug_info, canvas):
# level = list(map(float, debug_info['filter_parameters']))
# level[1] += 1
# cv2.rectangle(canvas, (8, 40), (56, 52), (1, 1, 1), cv2.FILLED)
# cv2.putText(canvas, '%.2f %.2f' % tuple(level), (8, 48),
# cv2.FONT_HERSHEY_SIMPLEX, 0.25, (0, 0, 0))
class SaturationPlusFilter(Filter):
def __init__(self, net, cfg):
Filter.__init__(self, net, cfg)
self.short_name = 'S+'
self.begin_filter_parameter = cfg.saturation_begin_param
self.num_filter_parameters = 1
def filter_param_regressor(self, features):
return tf.sigmoid(features)
def process(self, img, param, defog, IcA):
img = tf.minimum(img, 1.0)
hsv = tf.image.rgb_to_hsv(img)
s = hsv[:, :, :, 1:2]
v = hsv[:, :, :, 2:3]
# enhanced_s = s + (1 - s) * 0.7 * (0.5 - tf.abs(0.5 - v)) ** 2
enhanced_s = s + (1 - s) * (0.5 - tf.abs(0.5 - v)) * 0.8
hsv1 = tf.concat([hsv[:, :, :, 0:1], enhanced_s, hsv[:, :, :, 2:]], axis=3)
full_color = tf.image.hsv_to_rgb(hsv1)
param = param[:, :, None, None]
color_param = param
img_param = 1.0 - param
return img * img_param + full_color * color_param
# def visualize_filter(self, debug_info, canvas):
# exposure = debug_info['filter_parameters'][0]
# if canvas.shape[0] == 64:
# cv2.rectangle(canvas, (8, 40), (56, 52), (1, 1, 1), cv2.FILLED)
# cv2.putText(canvas, 'S %+.2f' % exposure, (8, 48),
# cv2.FONT_HERSHEY_SIMPLEX, 0.3, (0, 0, 0))
# else:
# self.draw_high_res_text('Saturation %+.2f' % exposure, canvas)
这里移除了大部分与filter.py不相干的代码,仅保留lrelu, rgb2lum, tanh_range, lerp 4个函数。
def lrelu(x, leak=0.2, name="lrelu"):
with tf.variable_scope(name):
f1 = 0.5 * (1 + leak)
f2 = 0.5 * (1 - leak)
return f1 * x + f2 * abs(x)
def rgb2lum(image):
image = 0.27 * image[:, :, :, 0] + 0.67 * image[:, :, :,
1] + 0.06 * image[:, :, :, 2]
return image[:, :, :, None]
def tanh01(x):
return tf.tanh(x) * 0.5 + 0.5
def tanh_range(l, r, initial=None):
def get_activation(left, right, initial):
def activation(x):
if initial is not None:
bias = math.atanh(2 * (initial - left) / (right - left) - 1)
else:
bias = 0
return tanh01(x + bias) * (right - left) + left
return activation
return get_activation(l, r, initial)
def lerp(a, b, l):
return (1 - l) * a + l * b
3、CNN-PP与DIP模块训练与优化
3.1 loss设计
这里只探讨与CNN-PP优化相关的loss。
通过观察yolov3.py中的__build_nework函数,可以看到最后recovery_loss 的实现为:recovery_loss = tf.reduce_sum(tf.pow(filtered_image_batch - input_data_clean, 2.0))#/(2.0 * batch_size)
其中filtered_image_batch 作为直接参与yolov3模型前向传播的对象,使用filtered_image_batch 与 input_data_clean的mse loss优化CNN-PP模块的输出。故此可以看出CNN-PP | DIP实则是可以从IA-YOLO中剥离出来,单独作为数据优化模块使用。
def __build_nework(self, input_data, isp_flag, input_data_clean, defog_A, IcA):
filtered_image_batch = input_data
self.filter_params = input_data
filter_imgs_series = []
if isp_flag:
# start_time = time.time()
with tf.variable_scope('extract_parameters_2'):
input_data = tf.image.resize_images(input_data, [256, 256], method=tf.image.ResizeMethod.BILINEAR)
filter_features = common.extract_parameters_2(input_data, cfg, self.trainable)
# filter_features = tf.random_normal([1, 15], 0.5, 0.1)
filters = cfg.filters
filters = [x(filtered_image_batch, cfg) for x in filters]
filter_parameters = []
for j, filter in enumerate(filters):
with tf.variable_scope('filter_%d' % j):
print(' creating filter:', j, 'name:', str(filter.__class__), 'abbr.',
filter.get_short_name())
print(' filter_features:', filter_features.shape)
filtered_image_batch, filter_parameter = filter.apply(
filtered_image_batch, filter_features, defog_A, IcA)
filter_parameters.append(filter_parameter)
filter_imgs_series.append(filtered_image_batch)
print(' output:', filtered_image_batch.shape)
self.filter_params = filter_parameters
# end_time = time.time()
# print('filters所用时间:', end_time - start_time)
# input_data_shape = tf.shape(input_data)
# batch_size = input_data_shape[0]
recovery_loss = tf.reduce_sum(tf.pow(filtered_image_batch - input_data_clean, 2.0))#/(2.0 * batch_size)
然后模型主体返回的loss如下,可见其就是基于filtered_image_batch 与input_data_clean所计算的mse loss。其中filtered_image_batch 是DIP模块基于input_data所生成的,而input_data_clean不知是怎么了来的。
def compute_loss(self, label_sbbox, label_mbbox, label_lbbox, true_sbbox, true_mbbox, true_lbbox):
with tf.name_scope('smaller_box_loss'):
loss_sbbox = self.loss_layer(self.conv_sbbox, self.pred_sbbox, label_sbbox, true_sbbox,
anchors = self.anchors[0], stride = self.strides[0])
with tf.name_scope('medium_box_loss'):
loss_mbbox = self.loss_layer(self.conv_mbbox, self.pred_mbbox, label_mbbox, true_mbbox,
anchors = self.anchors[1], stride = self.strides[1])
with tf.name_scope('bigger_box_loss'):
loss_lbbox = self.loss_layer(self.conv_lbbox, self.pred_lbbox, label_lbbox, true_lbbox,
anchors = self.anchors[2], stride = self.strides[2])
with tf.name_scope('giou_loss'):
giou_loss = loss_sbbox[0] + loss_mbbox[0] + loss_lbbox[0]
with tf.name_scope('conf_loss'):
conf_loss = loss_sbbox[1] + loss_mbbox[1] + loss_lbbox[1]
with tf.name_scope('prob_loss'):
prob_loss = loss_sbbox[2] + loss_mbbox[2] + loss_lbbox[2]
with tf.name_scope('recovery_loss'):
recovery_loss = self.recovery_loss
return giou_loss, conf_loss, prob_loss, recovery_loss
3.2 input_data_clean追溯
train相关代码
通过追溯代码train.py,可以发现input_data_clean为trainset返回的图像。
此外,以下代码也反应了带雾与不带雾的数据传播流程,可以预见的带雾流程更加复杂。同时,针对DefogFilter有各种暗通道计算方法,预计是用于DefogFilter 。而据博主的了解,去雾极为耗时,而在IA-YOLO论文中却没有仔细说明train与train_lowlight的差异,仅描述了使用CNN-PP和DIP仅增加13ms的处理时间。
而在train_lowlight.py中,数据forword流程则更加简单,仅使用np.power(train_data[0], lowlight_param)模拟生成低亮度数据
def train(self):
self.sess.run(tf.global_variables_initializer())
try:
print('=> Restoring weights from: %s ... ' % self.initial_weight)
self.loader.restore(self.sess, self.initial_weight)
except:
print('=> %s does not exist !!!' % self.initial_weight)
print('=> Now it starts to train YOLOV3 from scratch ...')
self.first_stage_epochs = 0
def DarkChannel(im):
b, g, r = cv2.split(im)
dc = cv2.min(cv2.min(r, g), b);
return dc
def AtmLight(im, dark):
[h, w] = im.shape[:2]
imsz = h * w
numpx = int(max(math.floor(imsz / 1000), 1))
darkvec = dark.reshape(imsz, 1)
imvec = im.reshape(imsz, 3)
indices = darkvec.argsort(0)
indices = indices[(imsz - numpx):imsz]
atmsum = np.zeros([1, 3])
for ind in range(1, numpx):
atmsum = atmsum + imvec[indices[ind]]
A = atmsum / numpx
return A
def DarkIcA(im, A):
im3 = np.empty(im.shape, im.dtype)
for ind in range(0, 3):
im3[:, :, ind] = im[:, :, ind] / A[0, ind]
return DarkChannel(im3)
for epoch in range(1, 1+self.first_stage_epochs+self.second_stage_epochs):
if epoch <= self.first_stage_epochs:
train_op = self.train_op_with_frozen_variables
else:
train_op = self.train_op_with_all_variables
pbar = tqdm(self.trainset)
train_epoch_loss, test_epoch_loss = [], []
for train_data in pbar:
if args.fog_FLAG:
# start_time = time.time()
dark = np.zeros((train_data[0].shape[0], train_data[0].shape[1], train_data[0].shape[2]))
defog_A = np.zeros((train_data[0].shape[0], train_data[0].shape[3]))
IcA = np.zeros((train_data[0].shape[0], train_data[0].shape[1], train_data[0].shape[2]))
if DefogFilter in cfg.filters:
# print("**************************")
for i in range(train_data[0].shape[0]):
dark_i = DarkChannel(train_data[0][i])
defog_A_i = AtmLight(train_data[0][i], dark_i)
IcA_i = DarkIcA(train_data[0][i], defog_A_i)
dark[i, ...] = dark_i
defog_A[i, ...] = defog_A_i
IcA[i, ...] = IcA_i
IcA = np.expand_dims(IcA, axis=-1)
_, summary, train_step_loss, train_step_loss_recovery, global_step_val = self.sess.run(
[train_op, self.write_op, self.loss, self.recovery_loss, self.global_step], feed_dict={
self.input_data: train_data[0],
self.defog_A: defog_A,
self.IcA: IcA,
self.label_sbbox: train_data[1],
self.label_mbbox: train_data[2],
self.label_lbbox: train_data[3],
self.true_sbboxes: train_data[4],
self.true_mbboxes: train_data[5],
self.true_lbboxes: train_data[6],
self.input_data_clean: train_data[7],
self.trainable: True,
})
else:
_, summary, train_step_loss, global_step_val = self.sess.run(
[train_op, self.write_op, self.loss, self.global_step], feed_dict={
self.input_data: train_data[7],
self.label_sbbox: train_data[1],
self.label_mbbox: train_data[2],
self.label_lbbox: train_data[3],
self.true_sbboxes: train_data[4],
self.true_mbboxes: train_data[5],
self.true_lbboxes: train_data[6],
self.input_data_clean: train_data[7],
self.trainable: True,
})
train_epoch_loss.append(train_step_loss)
self.summary_writer.add_summary(summary, global_step_val)
pbar.set_description("train loss: %.2f" % train_step_loss)
通过对train相关代码分析,发现input_data_clean是由dataloader直接返回的
在dataset.py中的__next__函数中发现代码:image, bboxes, clean_image = self.parse_annotation(annotation)
再度深入追溯parse_annotation函数:
- 1、发现关键代码
clean_image, bboxes = utils.image_preporcess(np.copy(image), [self.train_input_size, self.train_input_size], np.copy(bboxes)) ,通过分析发现,image_preporcess仅为图像resize函数
- 2、通过追溯parse_annotation函数内
if random.randint(0, 2) > 0:分支内读取图片的代码发现如下,可以看到foggy_image, clean_image分别为不同的图片路径读取而来。
image = cv2.imread(image_path)
img_name = image_path.split('/')[-1]
image_name = img_name.split('.')[0]
image_name_index = img_name.split('.')[1]
bboxes = np.array([list(map(lambda x: int(float(x)), box.split(','))) for box in line[1:]])
if random.randint(0, 2) > 0:
beta = random.randint(0, 9)
beta = 0.01 * beta + 0.05
if self.data_train_flag:
img_name = args.vocfog_traindata_dir + image_name \
+ '_' + ("%.2f" % beta) + '.' + image_name_index
else:
img_name = args.vocfog_valdata_dir + image_name \
+ '_' + ("%.2f" % beta) + '.' + image_name_index
foggy_image = cv2.imread(img_name)
clean_image = image
'''aug 代码'''
return foggy_image, bboxes, clean_image
- 3、通过以上分析可以发现train过程中的image实际为带雾的图像
实则为data_make.py根据原始图像生成的,而clean_image 则为原始图像。
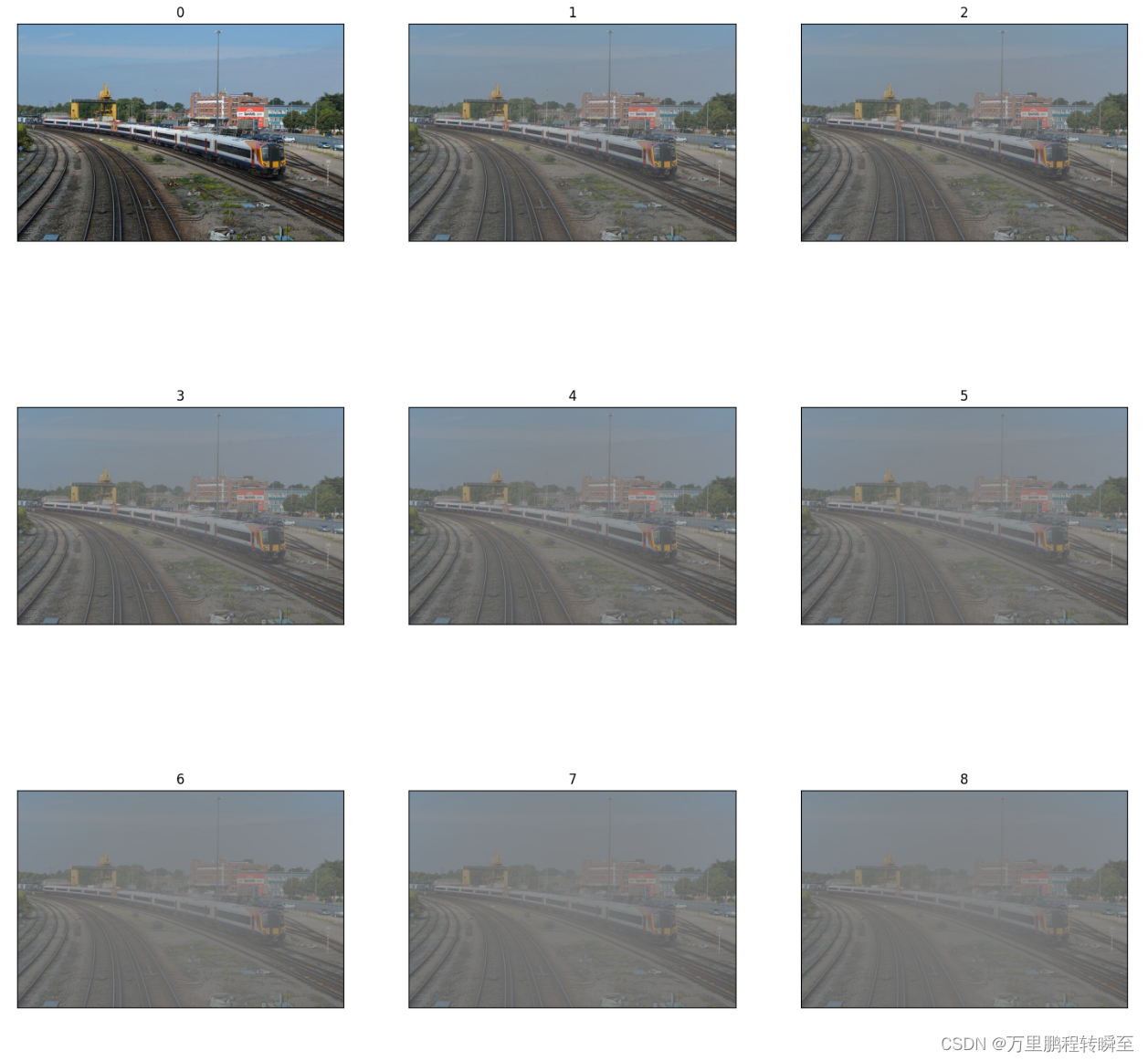
4 、生成带雾图片
在IA-YOLO论文中提到了基于大气散射模型的逆向操作使用代码生成不同等级的带雾图片,其代码在data_make.py,将核心函数进行抽取后,形成以下代码。
import numpy as np
import os
import cv2
import math
from numba import jit
import random
from PIL import Image
from ImgUilt import *
#生成带雾图片,i为雾气的等级
@jit()
def AddHaz_loop(img_f, i):
(row, col, chs) = img_f.shape
A = 0.5
# beta = 0.08
beta = 0.01 * i + 0.05# 0.03
size = math.sqrt(max(row, col))
center = (row // 2, col // 2)
for j in range(row):
for l in range(col):
d = -0.04 * math.sqrt((j - center[0]) ** 2 + (l - center[1]) ** 2) + size
td = math.exp(-beta * d)
img_f[j][l][:] = img_f[j][l][:] * td + A * (1 - td)
img_f = np.clip(img_f*255, 0, 255).astype(np.uint8)
return img_f
path = r"D:\实战项目\datasets\coco128\images\train2017\000000000071.jpg"
image = np.array(Image.open(path))
all_list=[image]
for i in range(11):
img_f = image/255
(row, col, chs) = image.shape
foggy_image = AddHaz_loop(img_f, i)
all_list.append(foggy_image)
#img=Image.fromarray(img_f)
myimshowsCL(all_list,rows=4,cols=3)
生成的带雾图像如下所示,其中myimshowsCL函数源自 python工具方法 28 2.3 单图、多图、网格显示
以下代码为读取voc数据生成带雾图像。
import numpy as np
import os
import cv2
import math
from numba import jit
import random
# only use the image including the labeled instance objects for training
def load_annotations(annot_path):
print(annot_path)
with open(annot_path, 'r') as f:
txt = f.readlines()
annotations = [line.strip() for line in txt if len(line.strip().split()[1:]) != 0]
return annotations
# print('*****************Add haze offline***************************')
def parse_annotation(annotation):
line = annotation.split()
image_path = line[0]
# print(image_path)
img_name = image_path.split('/')[-1]
# print(img_name)
image_name = img_name.split('.')[0]
# print(image_name)
image_name_index = img_name.split('.')[1]
# print(image_name_index)
#'/data/vdd/liuwenyu/data_vocfog/train/JPEGImages/'
if not os.path.exists(image_path):
raise KeyError("%s does not exist ... " %image_path)
image = cv2.imread(image_path)
for i in range(10):
@jit()
def AddHaz_loop(img_f, center, size, beta, A):
(row, col, chs) = img_f.shape
for j in range(row):
for l in range(col):
d = -0.04 * math.sqrt((j - center[0]) ** 2 + (l - center[1]) ** 2) + size
td = math.exp(-beta * d)
img_f[j][l][:] = img_f[j][l][:] * td + A * (1 - td)
return img_f
img_f = image/255
(row, col, chs) = image.shape
A = 0.5
# beta = 0.08
beta = 0.01 * i + 0.05
size = math.sqrt(max(row, col))
center = (row // 2, col // 2)
foggy_image = AddHaz_loop(img_f, center, size, beta, A)
img_f = np.clip(foggy_image*255, 0, 255)
img_f = img_f.astype(np.uint8)
img_name = '/data/vdd/liuwenyu/data_vocfog/train/JPEGImages/' + image_name \
+ '_' + ("%.2f"%beta) + '.' + image_name_index
#img_name = '/data/vdd/liuwenyu/data_vocfog/val/JPEGImages/' + image_name \
# + '_' + ("%.2f"%beta) + '.' + image_name_index
cv2.imwrite(img_name, img_f)
if __name__ == '__main__':
an = load_annotations('/home/liuwenyu.lwy/code/defog_yolov3/data/dataset/voc_norm_train.txt')
#an = load_annotations('/home/liuwenyu.lwy/code/defog_yolov3/data/dataset/voc_norm_test.txt')
ll = len(an)
print(ll)
for j in range(ll):
parse_annotation(an[j])