相机成像原理
相机成像原理分为透镜成像原理和小孔成像原理。
相机成像原理
现代相机有很多分类,且分类标准不统一。在这里简单分类为可更换镜头相机和不可更换镜头相机两种。对于可更换镜头而言。例如单反,单镜头反光照相机,镜头只是整个系统的一个部件,他的作用是获得我们想要的成像效果,但是镜头并不是成像的必要部件,把镜头取下,依然可以获得成像,此时就是利用了小孔成像的原理。对于没有反光镜设计的微单而言也一样。但是对于不可更换镜头的相机而言,那就是透镜成像原理。(其实也可以拆卸,只是你不能随意拆卸更换。)所以,严谨正确的表述应该是,在不拆掉现代相机的镜头时,现代相机运用的是透镜成像原理,在拆掉镜头之后,现代相机的机身本身利用的是小孔成像原理。
从中幅到手机镜头,统统都是透镜成像。
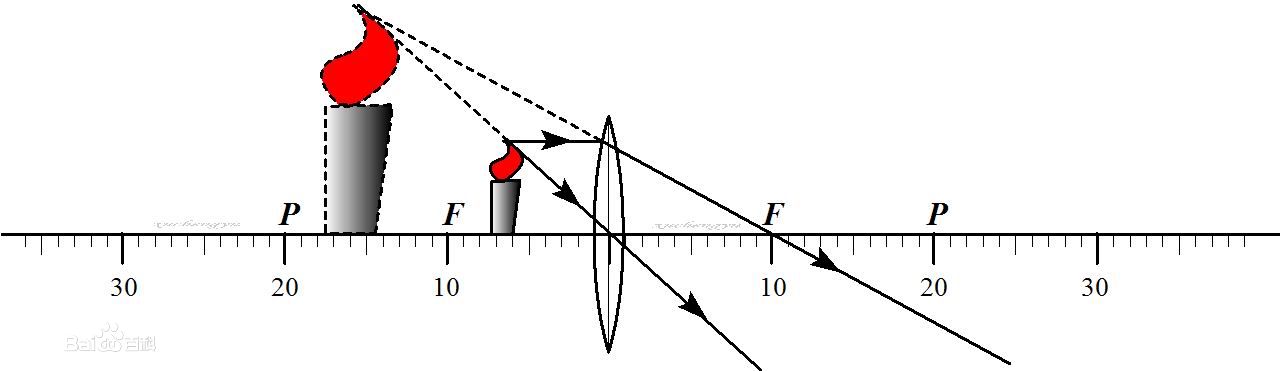
透镜成像原理
凸透镜的成像规律是1/u+1/v=1/f(即:物距的倒数与像距的倒数之和等于焦距的倒数。
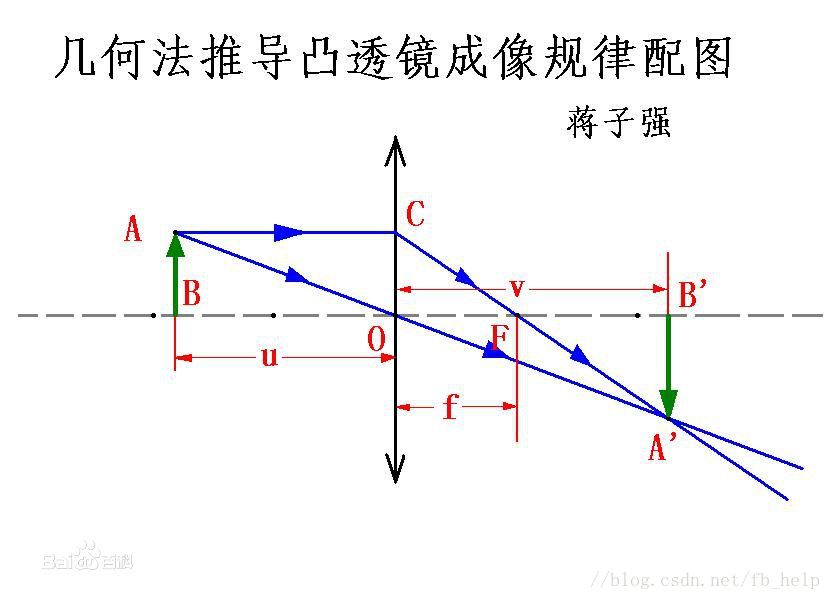
△ABO∽△A’B’O与△COF∽△A’B’F推到出
小孔成像原理
小孔成像,基于光线是直线传播:当小孔只能让一根光线通过时,从光源上的一点发出的直线传播的光线中,只有一根能通过小孔照射到屏上,光源上每一个点都只有一根光线通过小孔在自己照射到对应位置上,在屏上组成了光源的像;光源发出的光线在成像过程中没有改变方向,没有汇聚或发散,所以不存在焦点,也就没有焦距;
但成像中,光源到小孔的距离(物距)是存在的,屏到小孔的距离也同样是存在的,屏到小孔的距离实质上就是像距,改变像距可以改变像的大小。
当小孔的直径较大时,光源上一点发出的光线在屏上得到较大的光斑,光源每点的像都是大光斑,使得整个光源的像由相互重叠的大光斑构成,无法得到清晰的光源的像,孔太小,图象清晰但亮度较低,适当的选择小孔直径大小,是得到清晰图象的关键。
相机与物体的模糊
透镜成像模糊:凸透镜具有汇聚性,光源发出的光通过凸透镜汇聚一点,因此一个点在透镜成像后只有那一个点是最清楚的,如果成像点离像距近,则该点清晰,反正则模糊。景深就是相机描述这一性质的参数。另外,对于航空影像物距非常大,像距基本等于焦距。
小孔成像:物体的距小孔的距离和小孔的孔径都会影响物体的清晰度。
算法上我们可以用高斯模糊模拟这一现象。
###########################################
透镜成像规律总结
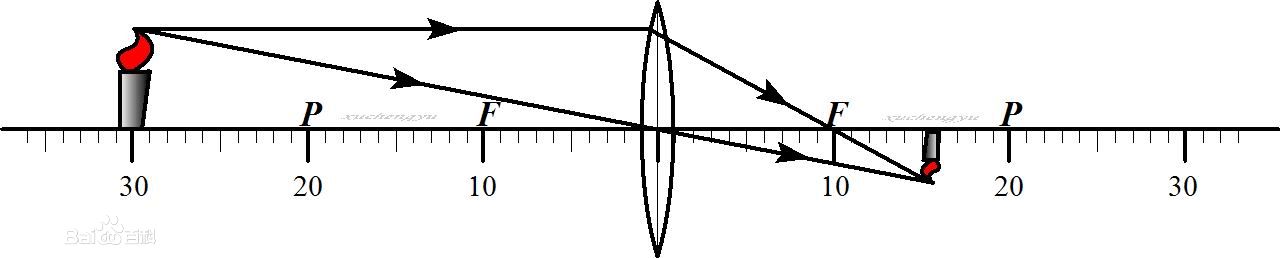
规律1:当物距大于2倍焦距时,则像距在1倍焦距和2倍焦距之间,成倒立、缩小的实像。此时像距小于物距,像比物小,物像异侧。
应用:照相机、摄像机。
规律2:当物距等于2倍焦距时,则像距也在2倍焦距, 成倒立、等大的实像。此时物距等于像距,像与物大小相等,物像异侧。
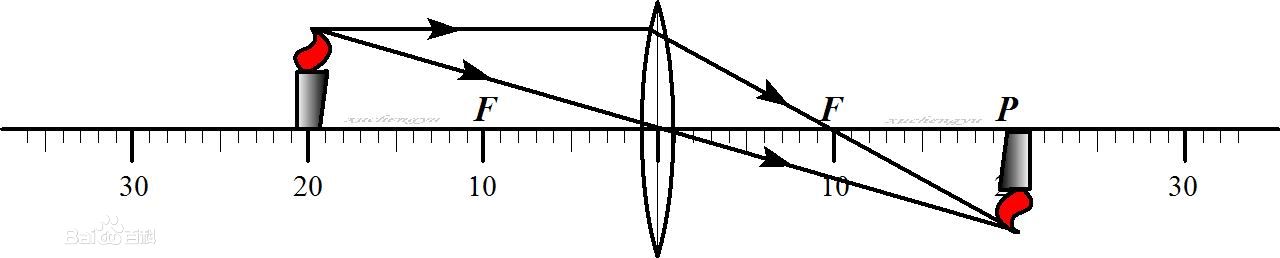
规律3:当物距小于2倍焦距、大于1倍焦距时,则像距大于2倍焦距, 成倒立、放大的实像。此时像距大于物距,像比物大,像位于物的异侧。
应用:投影仪、幻灯机、电影放映机。

规律4:当物距等于1倍焦距时,则不成像,成平行光射出。
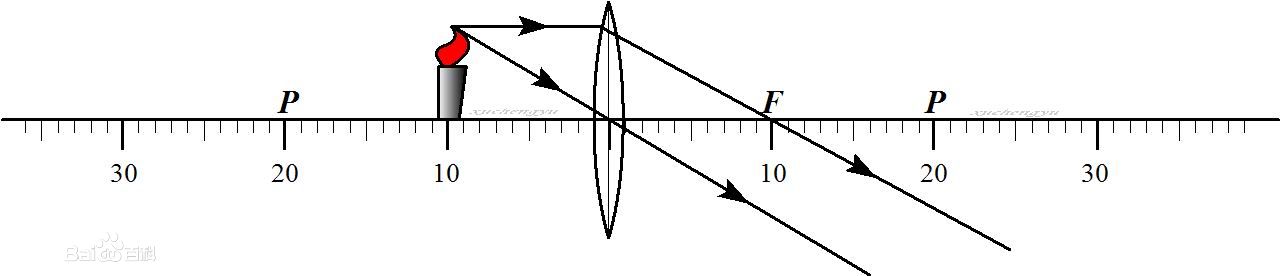
规律5:当物距小于1倍焦距时,则成正立、放大的虚像。此时像距大于物距,像比物大,物像同侧。
应用:放大镜。
人眼成像原理
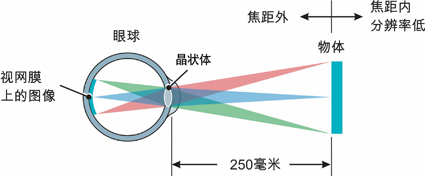
小孔成像原理
内容转载!