说明:项目皆参考于网上,代码也有大部分参考原文。仅用于学习和练习图像处理操作。
项目原文: Bubble sheet multiple choice scanner and test grader using OMR, Python and OpenCV
问题描述:
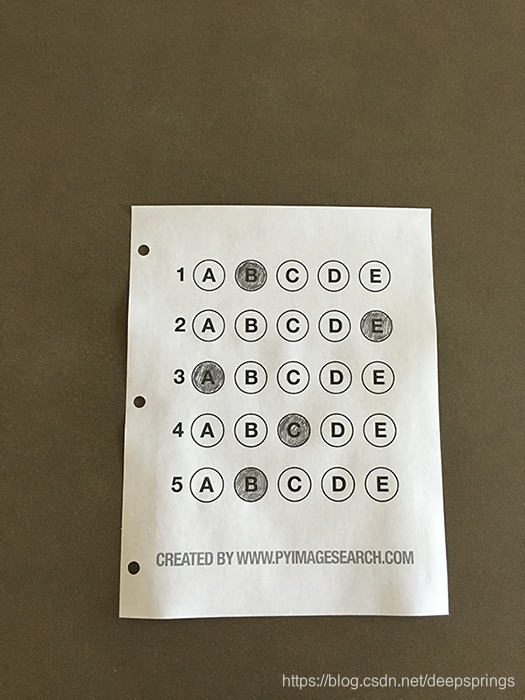
给定下面一张答题卡,识别并依次输出被涂黑的字母 BEACB。
解决思路/步骤:
- 1# 识别图像中答题卡部分,通过透视变换,将图像摆正。
- 2# 识别并提取答题卡中圆形部分。
- 3# 判断被涂黑的部分,输出被涂黑的字母。
代码实现:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
bool cmp1(Rect a, Rect b){
return (a.y<=b.y);
}
bool cmp2(Rect a, Rect b){
return (a.x<=b.x);
}
int main(int argc, char** argv){
if(argc==1) {
cout << "Usage: ProgramName PicturnFile" << endl;
return -1;
}
Mat imgSrc = imread(argv[1]);
if(imgSrc.empty()) {
cout << "Failed to load image!" << endl;
return -1;
}
Mat img = Mat::zeros(imgSrc.size(),imgSrc.type());
cvtColor(imgSrc, img, COLOR_BGR2GRAY);
Mat gray = img.clone();
GaussianBlur(img, img, Size(5,5), 0);
Canny(img, img, 75, 200);
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(img, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
// Mat test = Mat::zeros(img.size(), img.type());
// drawContours(test, contours, -1, Scalar(255), 2);
int k = 0;
float area = 0;
for(int i=0; i<contours.size(); i++){
float Area = contourArea(contours[i]);
if(area <= Area) {
area = Area;
k = i;
}
}
vector<Point2f> p;
double len;
len = arcLength(contours[k], true);
approxPolyDP(contours[k], p, len * 0.02, true);
int height = max((int)sqrt((p[0].y-p[1].y)*(p[0].y-p[1].y)),(int)sqrt((p[2].y-p[3].y)*(p[2].y-p[3].y)));
int width = max((int)sqrt((p[0].x-p[3].x)*(p[0].x-p[3].x)),(int)sqrt((p[2].x-p[1].x)*(p[2].x-p[1].x)));
vector<Point2f> pdst = {Point2f(0,0), Point2f(0,width-1), Point2f(height-1,width-1), Point2f(height-1,0)};
Mat m(3, 3, CV_32F);
m = getPerspectiveTransform(p, pdst);
warpPerspective(gray, img, m, Size(height, width));
threshold(img, img, 0, 255, THRESH_BINARY_INV | THRESH_OTSU);
contours.clear();
findContours(img, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
vector<Rect> rec;
for(int i=0; i<contours.size(); i++){
Rect rect = boundingRect(contours[i]);
float ar = rect.width/(float)rect.height;
if(rect.width >= 20 && rect.height >= 20 ){
rec.push_back(rect);
}
}
sort(rec.begin(), rec.end(), cmp1);
for(vector<Rect>::iterator it=rec.begin(); it!=rec.end(); it+=5){
sort(it, it+5, cmp2);
}
vector<int> ans(5,0);
for(int i=0; i<5; i++){
int maxcount = 0;
for(int j=0; j<5; j++){
Mat mask = Mat::zeros(img.size(),img.type());
rectangle(mask, rec[i*5+j], Scalar(255), -1);
bitwise_and(mask, img, mask);
int count = countNonZero(mask);
if(count >= maxcount){
maxcount = count;
ans[i] = j;
}
}
}
imshow("img",img);
waitKey(0);
for(int i=0; i<ans.size(); i++){
char out= 'A'+ans[i];
cout << out;
}
return 0;
}
# import the necessary packages
from imutils.perspective import four_point_transform
from imutils import contours
import numpy as np
import argparse
import imutils
import cv2
# construct the argument parse and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-i", "--image", required=True,
help="path to the input image")
args = vars(ap.parse_args())
# define the answer key which maps the question number
# to the correct answer
ANSWER_KEY = {0: 1, 1: 4, 2: 0, 3: 3, 4: 1}
# load the image, convert it to grayscale, blur it
# slightly, then find edges
image = cv2.imread(args["image"])
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
edged = cv2.Canny(blurred, 75, 200)
# find contours in the edge map, then initialize
# the contour that corresponds to the document
cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
cnts = imutils.grab_contours(cnts)
docCnt = None
# ensure that at least one contour was found
if len(cnts) > 0:
# sort the contours according to their size in
# descending order
cnts = sorted(cnts, key=cv2.contourArea, reverse=True)
# loop over the sorted contours
for c in cnts:
# approximate the contour
peri = cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, 0.02 * peri, True)
# if our approximated contour has four points,
# then we can assume we have found the paper
if len(approx) == 4:
docCnt = approx
break
# apply a four point perspective transform to both the
# original image and grayscale image to obtain a top-down
# birds eye view of the paper
paper = four_point_transform(image, docCnt.reshape(4, 2))
warped = four_point_transform(gray, docCnt.reshape(4, 2))
# apply Otsu's thresholding method to binarize the warped
# piece of paper
thresh = cv2.threshold(warped, 0, 255,
cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1]
# find contours in the thresholded image, then initialize
# the list of contours that correspond to questions
cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
cnts = imutils.grab_contours(cnts)
questionCnts = []
# loop over the contours
for c in cnts:
# compute the bounding box of the contour, then use the
# bounding box to derive the aspect ratio
(x, y, w, h) = cv2.boundingRect(c)
ar = w / float(h)
# in order to label the contour as a question, region
# should be sufficiently wide, sufficiently tall, and
# have an aspect ratio approximately equal to 1
if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1:
questionCnts.append(c)
# sort the question contours top-to-bottom, then initialize
# the total number of correct answers
questionCnts = contours.sort_contours(questionCnts,
method="top-to-bottom")[0]
correct = 0
# each question has 5 possible answers, to loop over the
# question in batches of 5
for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):
# sort the contours for the current question from
# left to right, then initialize the index of the
# bubbled answer
cnts = contours.sort_contours(questionCnts[i:i + 5])[0]
bubbled = None
# loop over the sorted contours
for (j, c) in enumerate(cnts):
# construct a mask that reveals only the current
# "bubble" for the question
mask = np.zeros(thresh.shape, dtype="uint8")
cv2.drawContours(mask, [c], -1, 255, -1)
# apply the mask to the thresholded image, then
# count the number of non-zero pixels in the
# bubble area
mask = cv2.bitwise_and(thresh, thresh, mask=mask)
total = cv2.countNonZero(mask)
# if the current total has a larger number of total
# non-zero pixels, then we are examining the currently
# bubbled-in answer
if bubbled is None or total > bubbled[0]:
bubbled = (total, j)
# initialize the contour color and the index of the
# *correct* answer
color = (0, 0, 255)
k = ANSWER_KEY[q]
# check to see if the bubbled answer is correct
if k == bubbled[1]:
color = (0, 255, 0)
correct += 1
# draw the outline of the correct answer on the test
cv2.drawContours(paper, [cnts[k]], -1, color, 3)
# grab the test taker
score = (correct / 5.0) * 100
print("[INFO] score: {:.2f}%".format(score))
cv2.putText(paper, "{:.2f}%".format(score), (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
cv2.imshow("Original", image)
cv2.imshow("Exam", paper)
cv2.waitKey(0)