一、实验原理:
1、拓展Sobel算子锐化
void Sobel(Array src, Array dst, int ddepth, int dx, int dy, int ksize);
①参数:
src
为输入图像;
dst
为输出图像,大小和通道数与源图像一致,必要时重建;
ddepth
为目标图像的位深度,负数表示与源图像相同;
dx
和
dy
为x差分和y差分阶数,小于
ksize
且不能都是0;
ksize
为内核大小,是不超过31的奇数。
②说明:由该函数自行计算扩展的Sobel内核。
2、固定阈值的二值化变换
double threshold(Array src, Array dst, double thresh, double value, int type);
①功能:对数组元素进行固定阈值操作。
②说明:
src
为源数组,位深度为CV_8U或CV_32F的单通道数组;
dst
为输出数组,大小和类型与
src
一致,必要时重建;
thresh
为阈值;
value
为指定二值化和反二值化使用的替代值;
type
为阈值类型(见下表)。
|
阈值种类
|
计算公式
|
操作结果
|
|
二值化阈值THRESH_BINARY
|
di=iif(si>t, v, 0)
|
二值图像,高亮度改为指定值v
|
|
反二值化阈值THRESH_BINARY_INV
|
di=iif(si>t, 0, v)
|
反二值图像,低亮度改为指定值v
|
|
截断阈值THRESH_TRUNC
|
di=iif(si>t, t, 0)
|
二值图像,高亮度改为阈值
|
|
0阈值THRESH_TOZERO
|
di=iif(si>t, si, 0)
|
灰度图像,过滤低亮度像素
|
|
反0阈值THRESH_TOZERO_INV
|
di=iif(si>t, 0, si)
|
灰度图像,过滤高亮度像素
|
③返回值:
thresh
。
二、算法程序
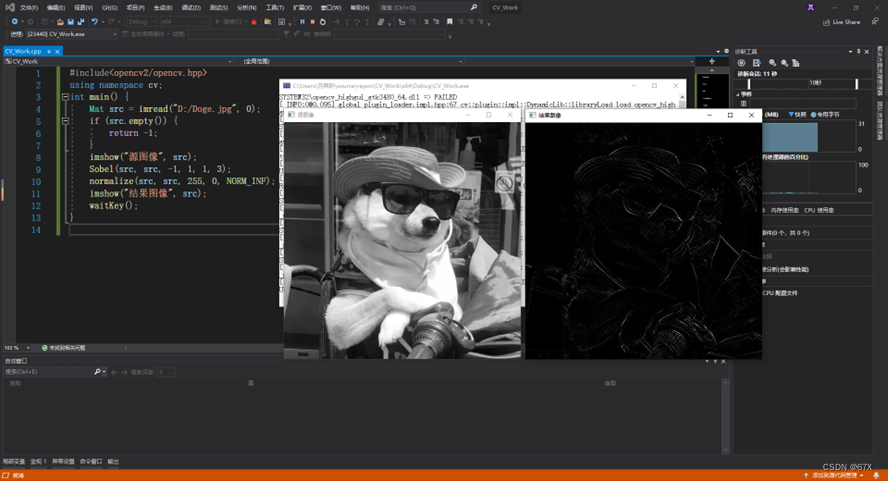
1、使用OpenCV编写一个程序,该程序对一幅灰度图像进行Sobel锐化,要求显示锐化以后的图像。其中内核大小为3×3,x和y方向均使用1阶差分。
#include<opencv2/opencv.hpp>
using namespace cv;
int main() {
Mat src = imread("D:/Doge.jpg", 0);
if (src.empty()) {
return -1;
}
imshow("源图像", src);
Sobel(src, src, -1, 1, 1, 3);
normalize(src, src, 255, 0, NORM_INF);
imshow("结果图像", src);
waitKey();
}
2、使用OpenCV编写一个程序,该程序对一幅灰度图像进行二值化变换,要求分别显示源图像和二值化以后的图像。其中二值化阈值为127,高亮度改为255。
#include<opencv2/opencv.hpp>
using namespace cv;
int main() {
Mat src = imread("D:/Doge.jpg", 0), dst;
if (src.empty()) {
return -1;
}
imshow("源图像", src);
threshold(src, dst, 127, 255, THRESH_BINARY);
imshow("结果图像", dst);
waitKey();
}
三、结果演示:
1、Sobel锐化
2、二值化处理
