一、创建一工作空间
1.新建一个文件夹,路径中应当没有中文
2.在文件夹中新建一个文件夹名字叫src,在ros工作空间中src文件夹是必须的。
3.在文件夹中右键打开终端,如果不是右键打开终端,需要手动进入该文件夹。
然后输入
catkin_make
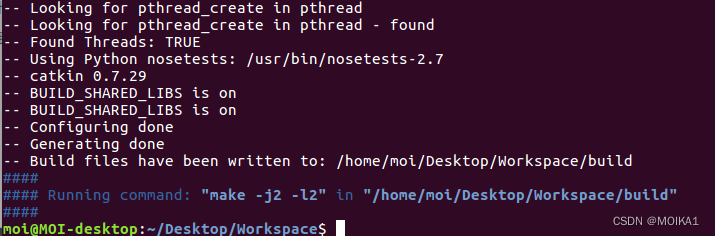
出现上图就算是成功。
4进入src文件夹
打开终端输入
catkin_create_pkg test_pkg std_msgs rospy roscpp
source devel/setup.bash
然后就可以在这个功能包里面编写.cpp或.py了
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)