文章目录
- 1 多普勒频率
- 2 PD雷达基本原理和组成
- 3 PD雷达的信号特征
1 多普勒频率
雷达使用多普勒频率来提取目标的径向速度(距离变化率),以及区分运动和静止目标与物体,例如杂波。
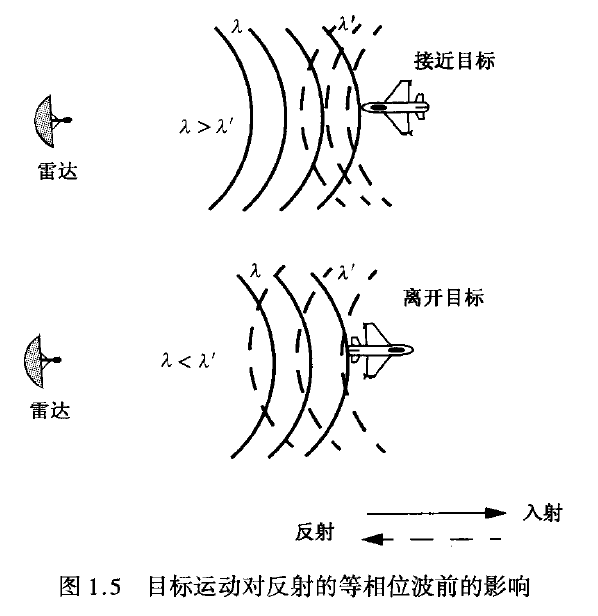
多普勒现象描述了由于目标相对于辐射源的运动而引起的入射波形中心频率的偏移。
根据目标运动的方向,此频移可能是正的或负的。入射到目标的波形具有以波长
λ
\lambda
λ 分隔的等相位波前。
接近目标使反射的等相位波前互相更靠近(更小的波长)。相反,离开或后退目标(远离雷达运动)使反射的等相位波前扩展(更大的波长) ,如下图所示。
2 PD雷达基本原理和组成
PD雷达广义定义:能实现对雷达信号脉冲串频谱单根谱线滤波,具有对目标进行速度分辨能力的雷达。
多普勒效应:当目标与雷达之间存在相对速度时,接收到回波信号的载频相对于发射信号的载频产生一个频移:
f
d
=
2
v
r
λ
f_d = \frac{2 v_r}{\lambda}
fd=λ2vr
其中
v
r
v_r
vr是雷达与目标的径向速度,
λ
\lambda
λ为载波波长。当雷达信号波长一定时,多普勒频移正比于目标与雷达之间的相对速度,只要能够测量出目标信号的多普勒频移,就可以确定目标与雷达之间的相对速度。
PD雷达狭义定义:PD雷达是一种利用多普勒效应检测目标信息的脉冲雷达,它发射相干脉冲串,通过测量目标回波的到达时间和多普勒频移来检测目标距离和速度,并根据运动目标回波的多普勒频移来提取目标,抑制杂波。
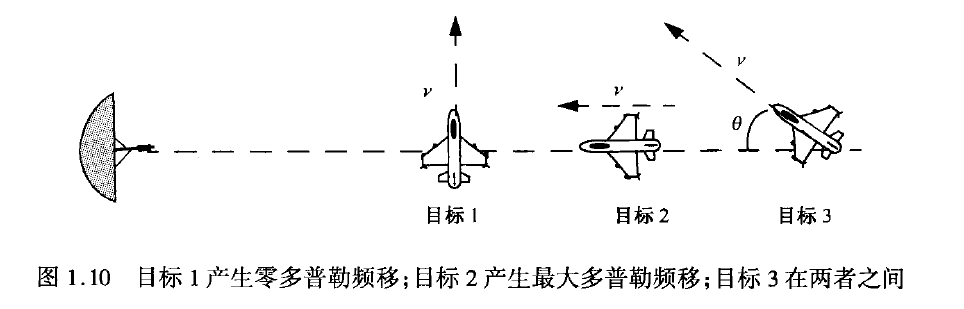
实际上, 考虑到雷达和目标之间的总角度,
f
d
f_d
fd的更一般的表达式为
f
d
=
2
v
c
o
s
θ
λ
f_d=\frac{2v cos{\theta}}{\lambda}
fd=λ2vcosθ
对于远离目标,有:
f
d
=
−
2
v
c
o
s
θ
λ
f_d=-\frac{2v cos{\theta}}{\lambda}
fd=−λ2vcosθ
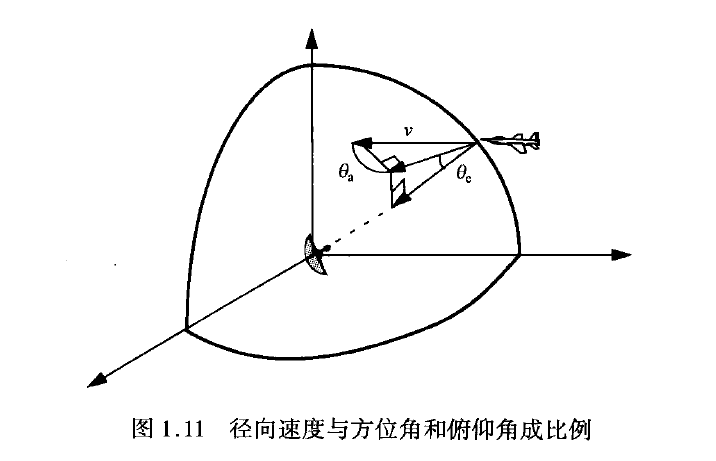
其中,
c
o
s
θ
=
c
o
s
θ
e
c
o
s
θ
a
cos{\theta}=cos{\theta_e}cos{\theta_a}
cosθ=cosθecosθa,角度
θ
e
\theta_e
θe和
θ
a
\theta_a
θa分别是俯仰角和方位角。
杂波的抑制:
- 干扰很强的主瓣杂波 — 主杂波抑制电路抑制杂波
- 机载PD雷达的高度杂波(由地面的垂直反射所形成的杂波) — 采用单独的固定频率抑制滤波器(零频率滤波器)来滤除
其它滤波器:
单边带滤波器:是一个带宽近似等于脉冲重复频率的带通滤波器,其主要作用是从回波频谱中只滤出一根谱线和它所对应的多普勒频移分量,从而使得后面的各种滤波处理在单根谱线上进行,通常单边带滤波设置在中频,选取回波频谱的中心谱线。
多普勒滤波器组:是覆盖预期的目标多普勒频移范围的一组邻接的窄带滤波器,当目标相对于雷达的径向速度不同,即多普勒频移不同时,它将落入不同的窄带滤波器。多普勒滤波器组起到了实现速度分辨和精确测量的作用。
经过上述滤波处理之后,雷达必须采取恒虚警(CFAR)处理技术,以便防止干扰增大时虚警概率过高,努力使得当噪声、杂波和干扰功率或其他参数发生变化时,输出端的虚警概率保持恒定速度、距离和角度跟踪系统实现对目标的有效跟踪。
3 PD雷达的信号特征
对PD雷达而言,均匀的相参脉冲串信号是最常用的基本波形,相参脉冲串信号一般利用周期性脉冲串从高稳定正弦波中截取产生。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)