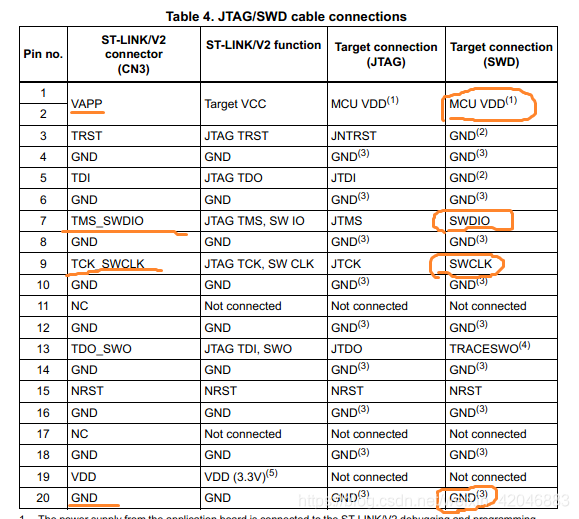
1、ST-LINK的外形图如下图所示: 2、接口引脚顺序定义如下图所示,注意缺口位置。 3、具体引脚定义如下图所示。 4、ST-LINK 到 SWD接线 SWD接口一般4个引脚,分别为:电源正、TCK、TMS、电源负 电源正—JTAG的1引脚 TMS—JTAG的7引脚 TCK—JTAG的引脚 电源负—JTAG的标有GND的引脚