RTOS启动
FreeRTOS在任务创建完成后调用函数vTaskStartScheduler()启动任务调度器。
vTaskStartScheduler()任务启动函数详解
void vTaskStartScheduler( void )
{
BaseType_t xReturn;
xReturn = xTaskCreate( prvIdleTask,
"IDLE", configMINIMAL_STACK_SIZE,
( void * ) NULL,
( tskIDLE_PRIORITY | portPRIVILEGE_BIT ),
&xIdleTaskHandle );
#if ( configUSE_TIMERS == 1 )
{
if( xReturn == pdPASS )
{
xReturn = xTimerCreateTimerTask();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif
if( xReturn == pdPASS )
{
portDISABLE_INTERRUPTS();
#if ( configUSE_NEWLIB_REENTRANT == 1 )
{
_impure_ptr = &( pxCurrentTCB->xNewLib_reent );
}
#endif
xNextTaskUnblockTime = portMAX_DELAY;
xSchedulerRunning = pdTRUE;
xTickCount = ( TickType_t ) 0U;
portCONFIGURE_TIMER_FOR_RUN_TIME_STATS();
if( xPortStartScheduler() != pdFALSE )
{
}
else
{
}
}
else
{
configASSERT( xReturn != errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY );
}
( void ) xIdleTaskHandle;
}
xPortStartScheduler()任务硬件相关函数详解
BaseType_t xPortStartScheduler( void )
{
portNVIC_SYSPRI2_REG |= portNVIC_PENDSV_PRI;
portNVIC_SYSPRI2_REG |= portNVIC_SYSTICK_PRI;
vPortSetupTimerInterrupt();
uxCriticalNesting = 0;
prvEnableVFP();
*( portFPCCR ) |= portASPEN_AND_LSPEN_BITS;
prvStartFirstTask();
return 0;
}
prvStartFirstTask()启动第一个任务函数详解
__asm void prvStartFirstTask( void )
{
PRESERVE8
ldr r0, =0xE000ED08
ldr r0, [r0]
ldr r0, [r0]
msr msp, r0
cpsie i
cpsie f
dsb
isb
svc 0
nop
nop
}
vPortSVCHandler()SVC异常处理函数详解
__asm void vPortSVCHandler( void )
{
PRESERVE8
ldr r3, =pxCurrentTCB
ldr r1, [r3]
ldr r0, [r1]
ldmia r0!, {r4-r11, r14}
msr psp, r0
isb
mov r0, #0
msr basepri, r0
bx r14
}
任务切换场景
任务切换场景:
1.执行系统调用接口(含有taskYIELD()的API)
2.Systick定时器中断
任务在哪里切换:任务在PendSV的异常中切换
__asm void xPortPendSVHandler( void )
{
extern uxCriticalNesting;
extern pxCurrentTCB;
extern vTaskSwitchContext;
PRESERVE8
mrs r0, psp
isb
ldr r3, =pxCurrentTCB
ldr r2, [r3]
tst r14, #0x10
it eq
vstmdbeq r0!, {s16-s31}
stmdb r0!, {r4-r11, r14}
str r0, [r2]
stmdb sp!, {r3}
mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY
msr basepri, r0
dsb
isb
bl vTaskSwitchContext
mov r0, #0
msr basepri, r0
ldmia sp!, {r3}
ldr r1, [r3]
ldr r0, [r1]
ldmia r0!, {r4-r11, r14}
tst r14, #0x10
it eq
vldmiaeq r0!, {s16-s31}
msr psp, r0
isb
#ifdef WORKAROUND_PMU_CM001
#if WORKAROUND_PMU_CM001 == 1
push { r14 }
pop { pc }
nop
#endif
#endif
bx r14
}
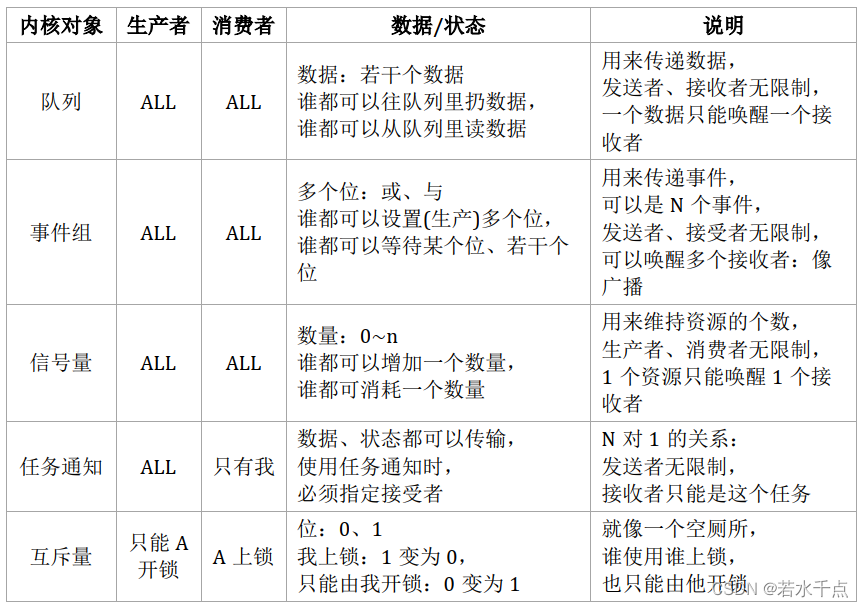
任务同步机制
- 队列
- 信号量(二值/计数/互斥)
- 事件组
- 任务通知(消息邮箱)
队列
队列传输数据的两种方式:
- 拷贝:把数据复制进队列
- 引用:把数据地址复制进队列,数据要做保护
多任务发送队列,怎么区别数据来源:
- 结构体:ID+数据形式
- 位拼接:高位表示ID,低位表示数据
QueueHandle_t xQueueCreate( UBaseType_t uxQueueLength, UBaseType_t uxItemSize);
BaseType_t xQueueReset( QueueHandle_t pxQueue);
void vQueueDelete( QueueHandle_t xQueue );
BaseType_t xQueueSend(QueueHandle_t xQueue,const void *pvItemToQueue,TickType_t xTicksToWait);
BaseType_t xQueueSendToBackFromISR(QueueHandle_t xQueue,const void *pvItemToQueue,BaseType_t *pxHigherPriorityTaskWoken);
BaseType_t xQueueReceive( QueueHandle_t xQueue,void * const pvBuffer,TickType_t xTicksToWait );
BaseType_t xQueueReceiveFromISR(QueueHandle_t xQueue,void *pvBuffer,BaseType_t *pxTaskWoken);
UBaseType_t uxQueueMessagesWaiting( const QueueHandle_t xQueue );
UBaseType_t uxQueueSpacesAvailable( const QueueHandle_t xQueue );
BaseType_t xQueueOverwrite(QueueHandle_t xQueue,const void * pvItemToQueue);
BaseType_t xQueueOverwriteFromISR(QueueHandle_t xQueue,const void * pvItemToQueue,BaseType_t*pxHigherPriorityTaskWoken);
BaseType_t xQueuePeek(QueueHandle_t xQueue,void * const pvBuffer,TickType_t xTicksToWait);
BaseType_t xQueuePeekFromISR(QueueHandle_t xQueue,void *pvBuffer,);
信号量
- 通知作用
- 计数型信号,信号初值自定义,发送加1,接收减1
- 二进制信号,信号初值是0,发送加1,接收减1
- 互斥信号,防止同时访问共享资源(共享资源:全局变量,静态变量,公共函数)
- 互斥信号禁止中断中使用
SemaphoreHandle_t xSemaphoreCreateCounting(UBaseType_t uxMaxCount, UBaseType_t uxInitialCount);
SemaphoreHandle_t xSemaphoreCreateBinary( void );
SemaphoreHandle_t xSemaphoreCreateMutex( void );
SemaphoreHandle_t xSemaphoreCreateRecursiveMutex( void );
void vSemaphoreDelete( SemaphoreHandle_t xSemaphore );
BaseType_t xSemaphoreGive( SemaphoreHandle_t xSemaphore );
BaseType_t xSemaphoreGiveFromISR(SemaphoreHandle_t xSemaphore,BaseType_t *pxHigherPriorityTaskWoken);
BaseType_t xSemaphoreTake(SemaphoreHandle_t xSemaphore,TickType_t xTicksToWait);
BaseType_t xSemaphoreTakeFromISR(SemaphoreHandle_t xSemaphore,BaseType_t *pxHigherPriorityTaskWoken);
事件组
- 事件发生,广播所有任务
- 事件可以与或组合
- 多任务可以同步
EventGroupHandle_t xEventGroupCreate( void );
void vEventGroupDelete( EventGroupHandle_t xEventGroup );
EventBits_t xEventGroupSetBits( EventGroupHandle_t xEventGroup,const EventBits_t uxBitsToSet );
EventBits_t xEventGroupSetBitsFromISR( EventGroupHandle_t xEventGroup,const EventBits_t uxBitsToSet ,BaseType_t * pxHigherPriorityTaskWoken);
EventBits_t xEventGroupWaitBits( EventGroupHandle_t xEventGroup,const EventBits_t uxBitsToWaitFor,const BaseType_t xClearOnExit,const BaseType_t xWaitForAllBits,TickType_t xTicksToWait );
EventBits_t xEventGroupSync( EventGroupHandle_t xEventGroup,const EventBits_t uxBitsToSet,const EventBits_t uxBitsToWaitFor,TickType_t xTicksToWait );
任务通知
- 明确通知的任务,数据任务独享
- 不额外开辟内存
- 效率更高
- 中断中只能发送数据给任务
BaseType_t xTaskNotifyGive( TaskHandle_t xTaskToNotify );
void vTaskNotifyGiveFromISR( TaskHandle_t xTaskHandle, BaseType_t *pxHigherPriorityTaskWoken );
uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit, TickType_t xTicksToWait );
BaseType_t xTaskNotify( TaskHandle_t xTaskToNotify, uint32_t ulValue, eNotifyActioneAction );
BaseType_t xTaskNotifyFromISR( TaskHandle_t xTaskToNotify,uint32_t ulValue,eNotifyAction eAction,BaseType_t *pxHigherPriorityTaskWoken );
BaseType_t xTaskNotifyWait( uint32_t ulBitsToClearOnEntry,uint32_t ulBitsToClearOnExit,uint32_t *pulNotificationValue,TickType_t xTicksToWait );
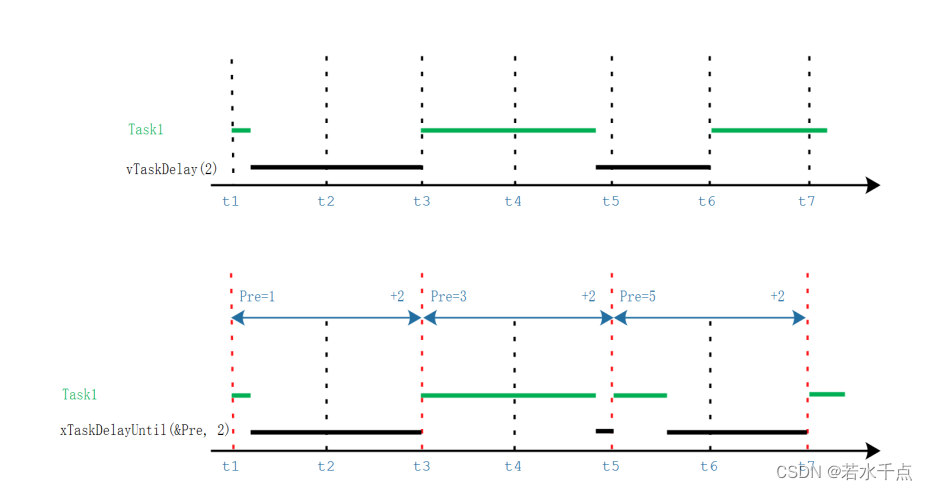
任务延时
vTaskDelay(n):进入vTaskDelay到退出间隔至少n个Tick中断
xTaskDelayUntil(&Pre, n):两次退出 xTaskDelayUntil 的时间至少是n个Tick中断,也就是任务运行时的Tick+Delay的Tick
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)