1.引言
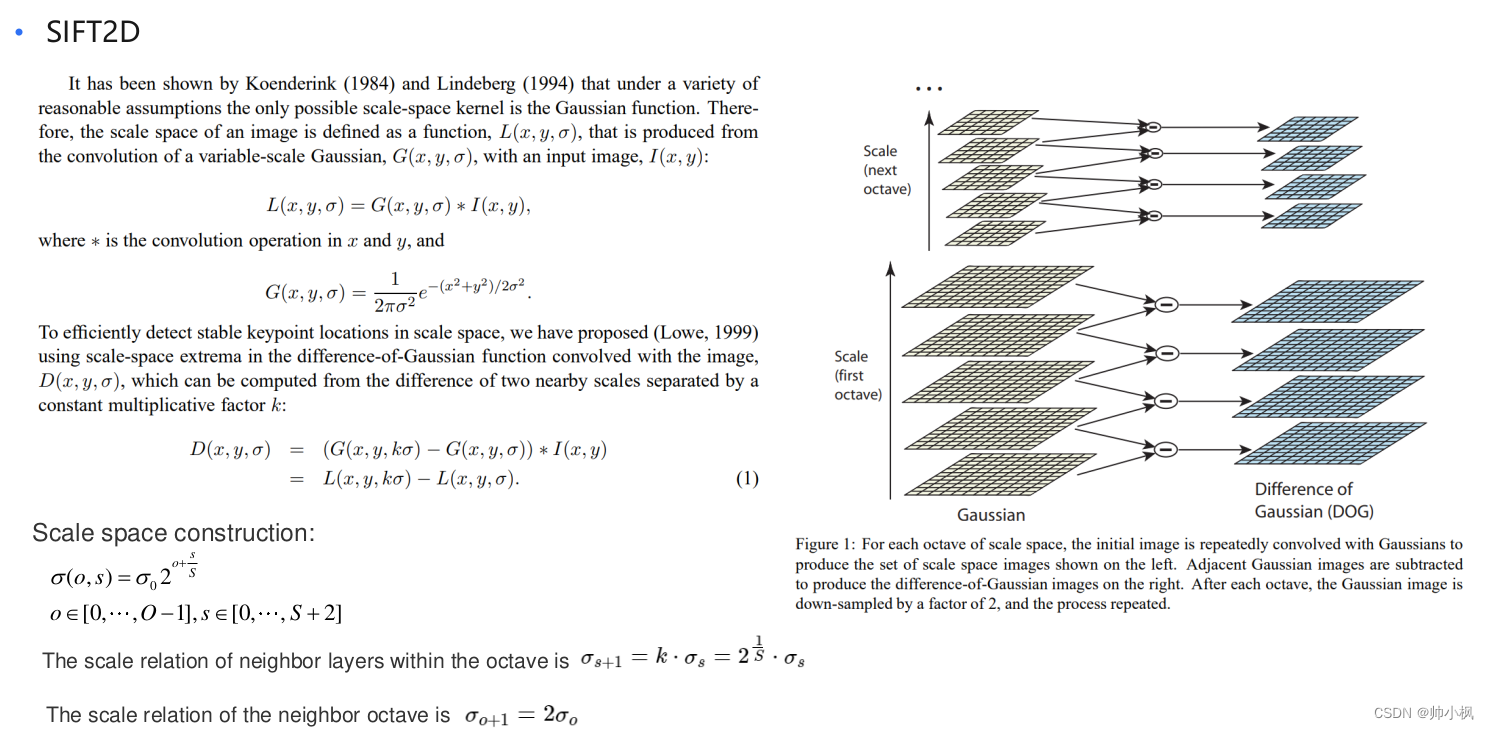
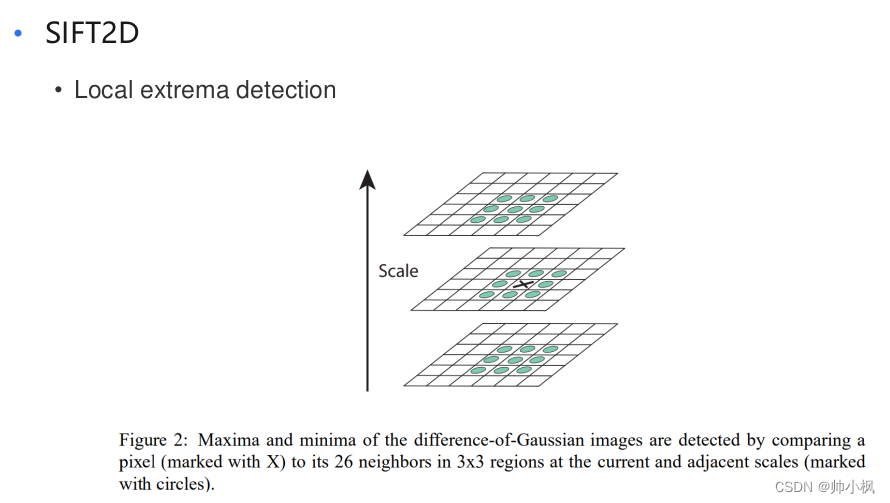
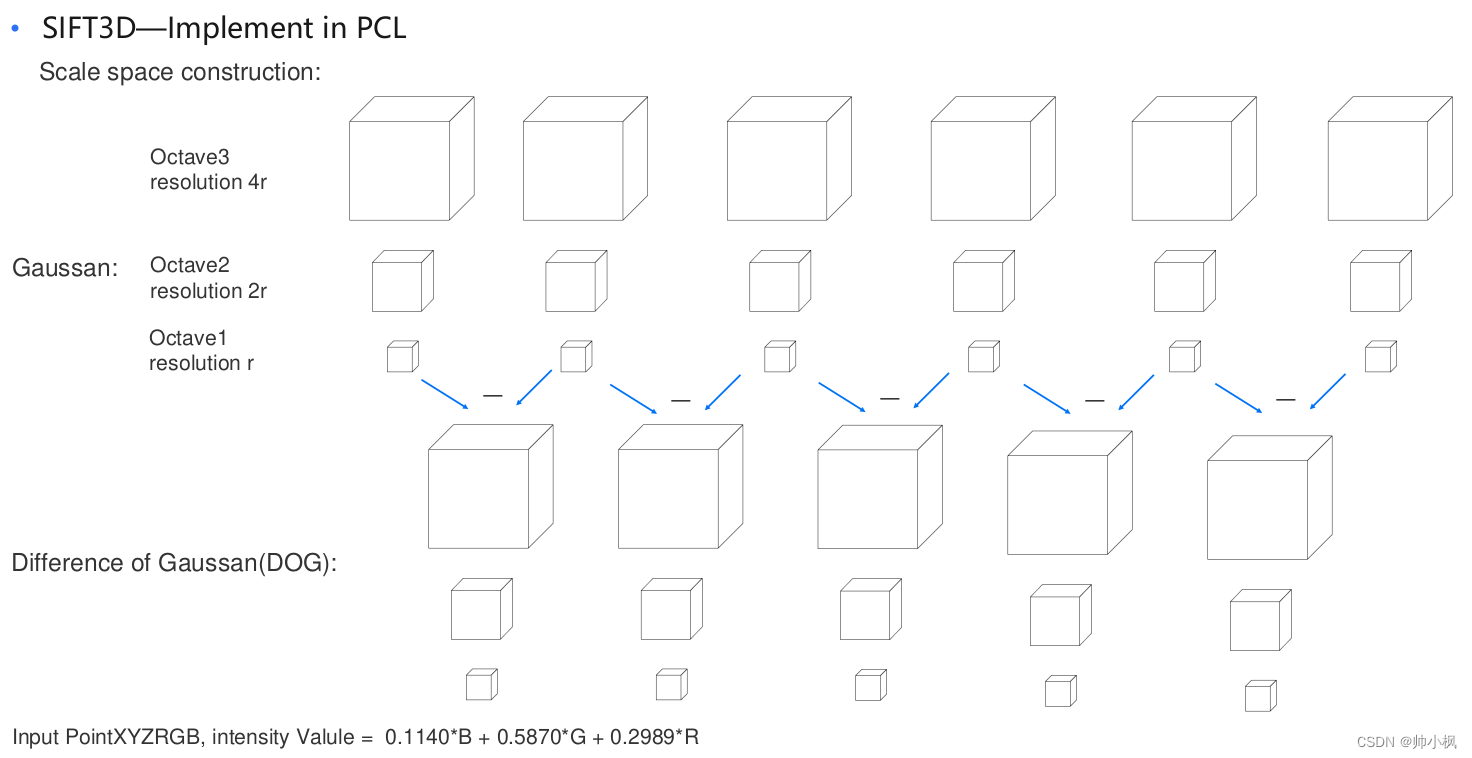
SIFT3D的理论基础完全是从图像特征SIFT2D中迁移类比过来的,类似的还有Harris3D和Harris6D的理论也是来源于Harris2D的,这些点云特征在PCL库中都有具体的实现。Harris3D和Harris6D目前已经有很好的博客和视频讲解了但是SIFT3D却没有一个比较好的介绍。于是本人最近详细看了PCL库中SIFT3D关键点的提取流程,并类比SIFT2D在这里进行完整的介绍。
2.算法流程概述
先放几张图。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)