ROS自定义发布消息类型:
在 ROS 通信协议中,数据载体是一个较为重要组成部分,在上一案例中,ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty… 但是,这些数据一般只包含一个 data 字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如: 激光雷达的信息… std_msgs 由于描述性较差而显得力不从心,这种场景下可以使用自定义的消息类型
自定义消息类型,类似C语言中的结构体,在所用到的数据结构较为复杂的时候使用。
结构是:数据类型 数据名称
流程如下:
(1)新建msg文件
在功能包中新建一个msg文件,写上数据类型和数据名称
string name
uint16 age
float64 height
(2)自定义msg文件所需相关配置
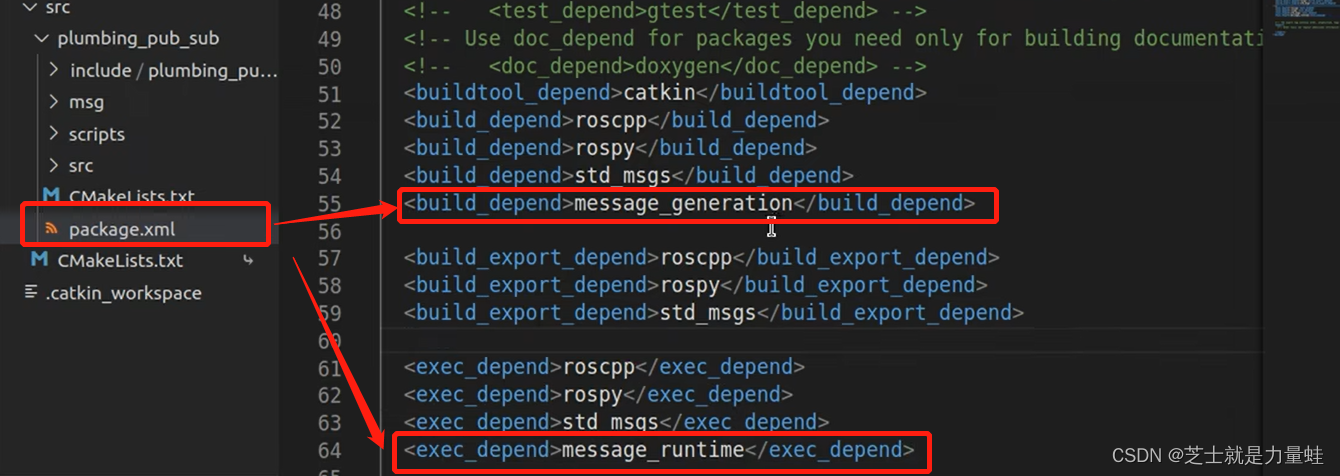
①创建完成后还不能单独使用,需要在package.xml中做相应配置,添加依赖“message_generation”消息生成,需要运行,所以需要导入message_runtime
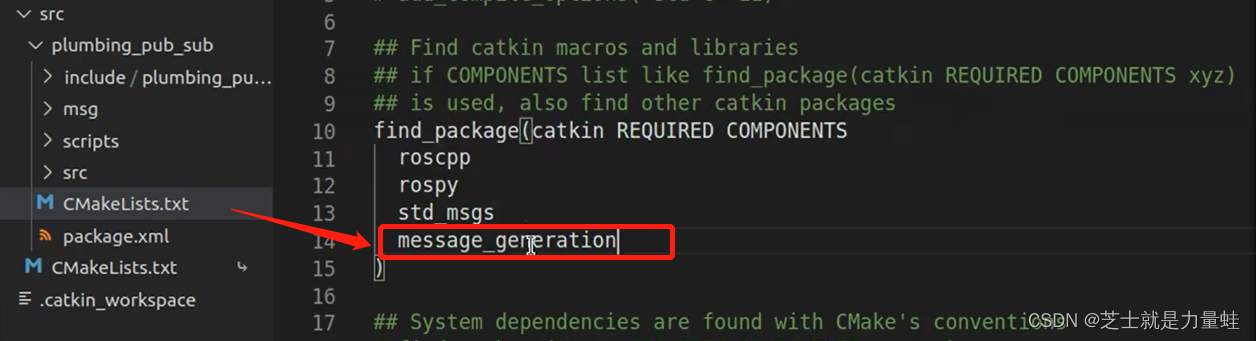
②配置CMakelist
添加依赖包:message_generation
这里find_package是在编译自定义功能包时,所依赖的现有功能包,如果这里添加的依赖包有问题,可能会在编译时报错。
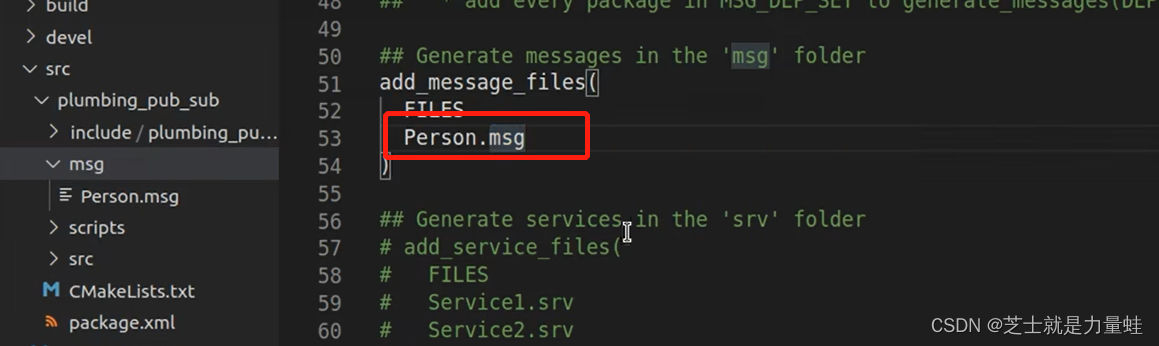
添加自定义message文件,将注释放开,并将示例文件名改为我们自定义的文件名“Person.msg“
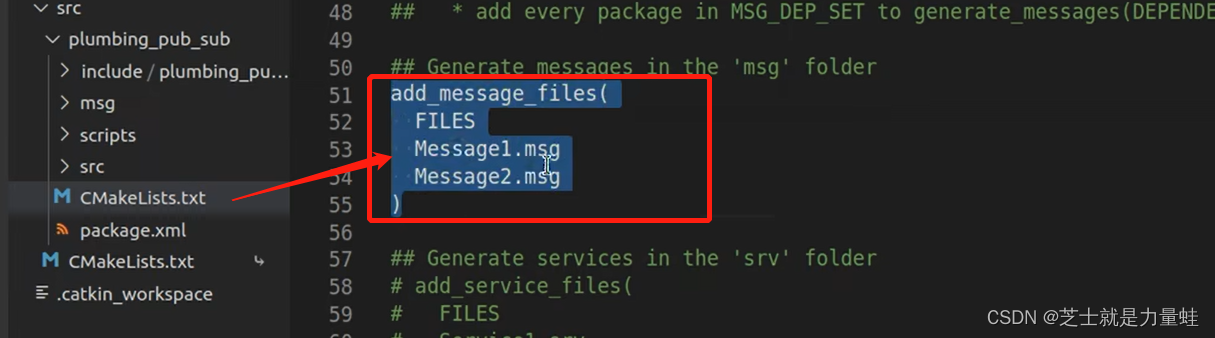
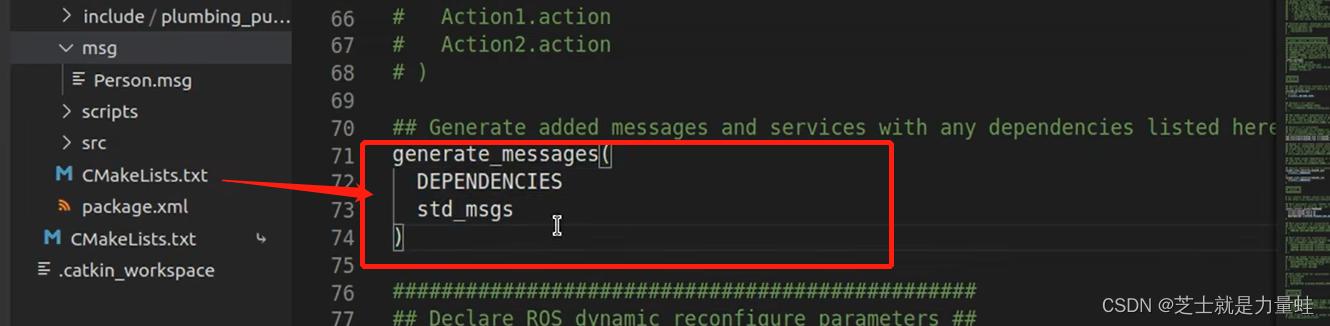
将generation message注释放开
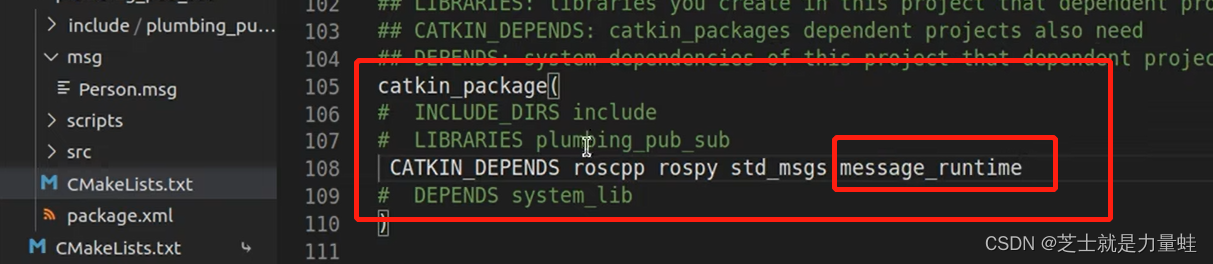
放开注释并添加message_runtime。这里的catkin_package与前文中的find_package是一种对应关系,自定义功能包依赖于find_package中的功能包,而find-package中的功能包又依赖于catkin_package中的功能包。他们之间是层层依赖的关系。如果这里添加的依赖包有问题,那么即使编译通过,运行时可能依然会出现报错。
(3)编译
ctrl+shift+B即开始编译功能包,未抛出异常即编译成功
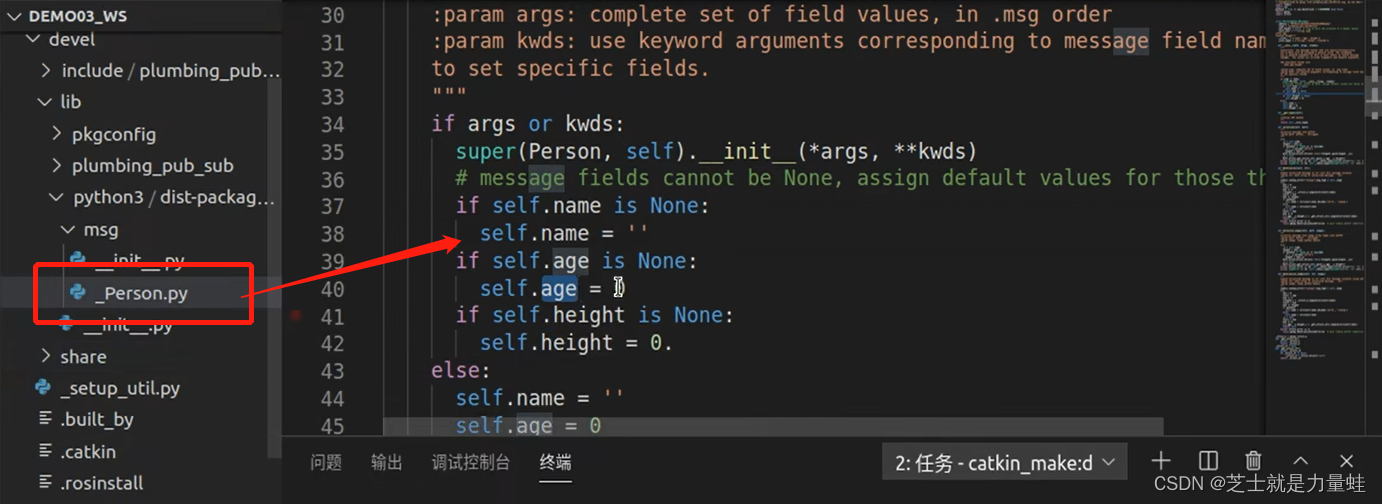
编译成功后会生成一些中间文件,我们进入工作空间下的开发空间(devel文件夹),可以看到lib文件夹下python3文件夹中生成了_Person.py文件,里面包含了刚才新建的几个量,后续就可以调用。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)