一、仿真问题
1. roslaunch无法启动px4 gazebo的无人机仿真,但是make px4_sitl gazbeo可以正常启动
2.make px4_sitl gazbeo启动到一半无法启动,显示无法连接gazebo master之类的:

gazebo的motor model的plugin插件修改了,官方都没有修改好,看看用mavlink发出去吧。
3.
Resource not found: mavros
ROS path [0]=/opt/ros/noetic/share/ros
ROS path [1]=/opt/ros/noetic/share
2个原因,一是没有安装报错显示的包,比如下面的mavros,二看下面连接,环境变量没有设置。
参考官方:http://.bashrc配置
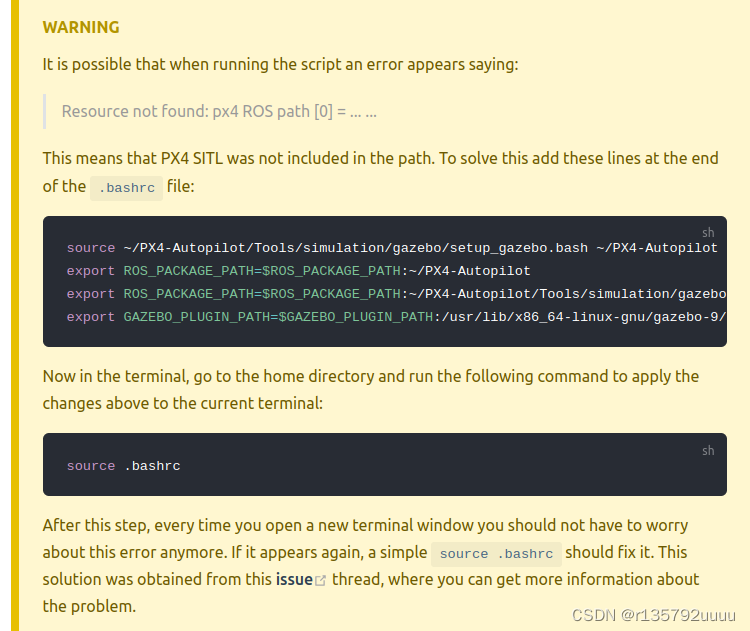
官方的是最新版的路径,老版本的路径不一样!
3. 安装过程中出现:没有可用的软件包 python-wstool,但是它被其它的软件包引用了。
这可能意味着这个缺失的软件包可能已被废弃,或者只能在其他发布源中找到。然而下列软件包会取代它: python3-wstool
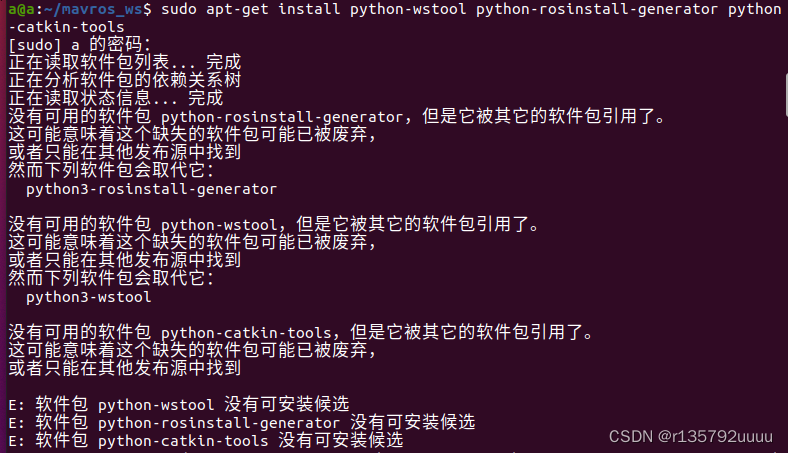
非常简单:python后面加个3即可
sudo apt-get install python3-wstool python3-rosinstall-generator python3-catkin-tools
4. VTOL的问题 可能会遇到
http://PX4 VTOL的编译错误bug
二、真机问题
2.1 真机上启动mavos和QGC冲突,导致开启QGC后mavros关闭,mavros终端显示程序被占用
需要在关闭QGC的通讯协议只保留UDP方式。
选择第三个 Applications settings
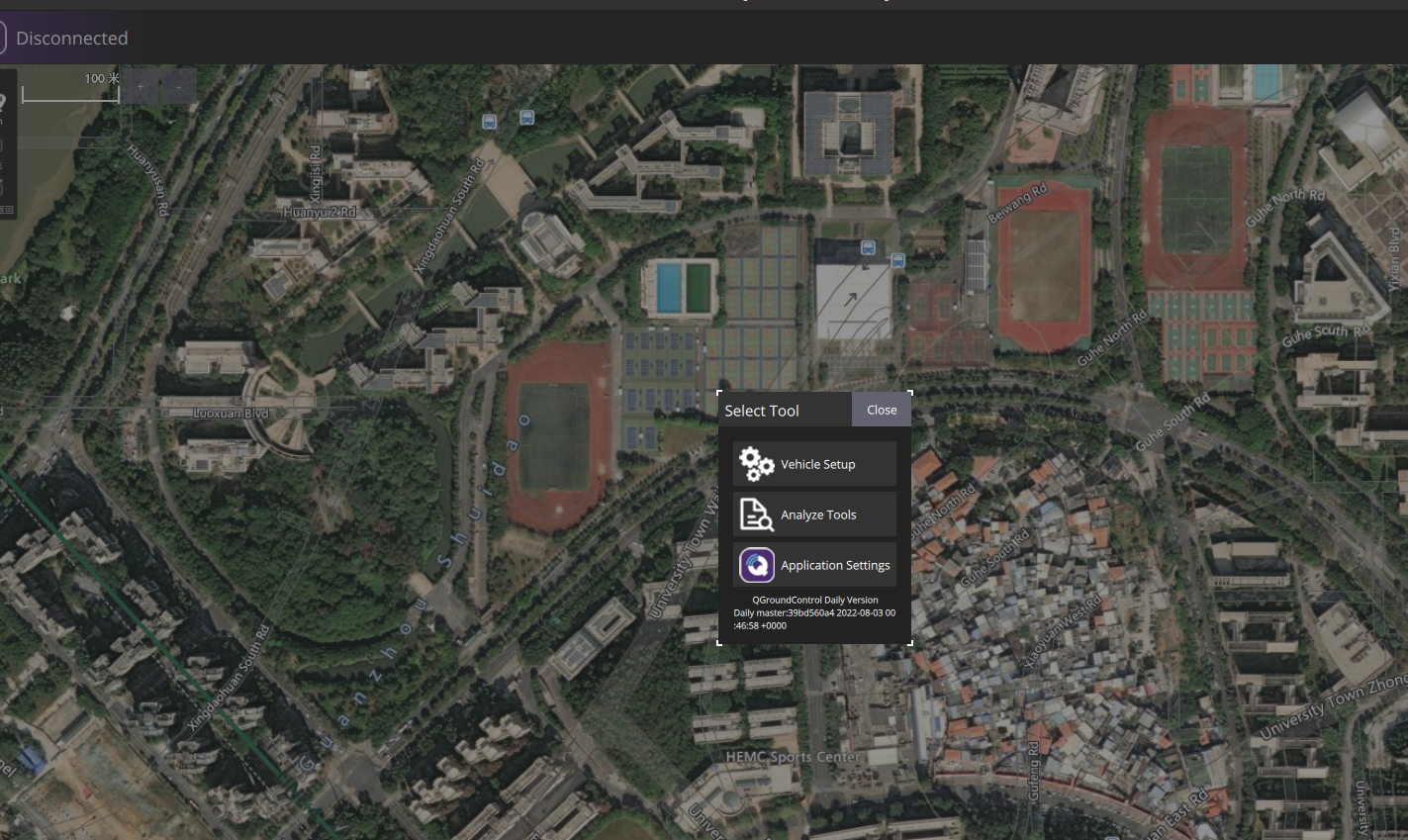
常规里面这个:
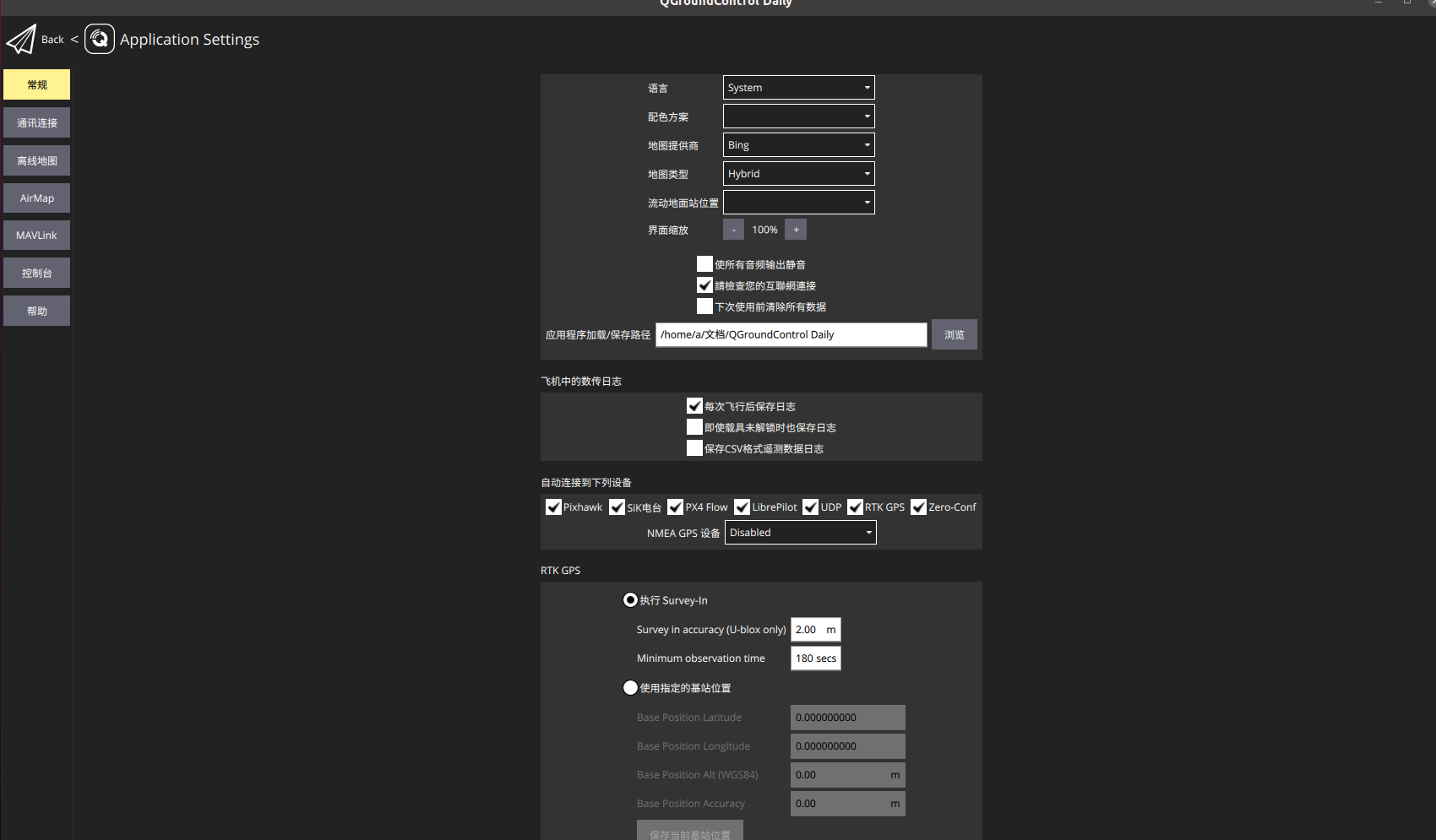
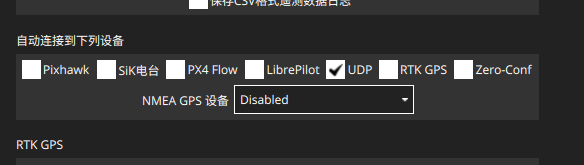
就不会冲突了,但是如果关闭了这些地方之后,连接无人机和QGC之后,QGC将无法对无人机进行上传程序,没法调试了。
TODO:所以要不就是找解决办法,要不就是调频、校准工作做完,准备起飞再关闭其他的通讯协议,开启mavros。
2.2 dshot无法显示 dshot esc_info 报错,No data received. If telemetry is setup correctly
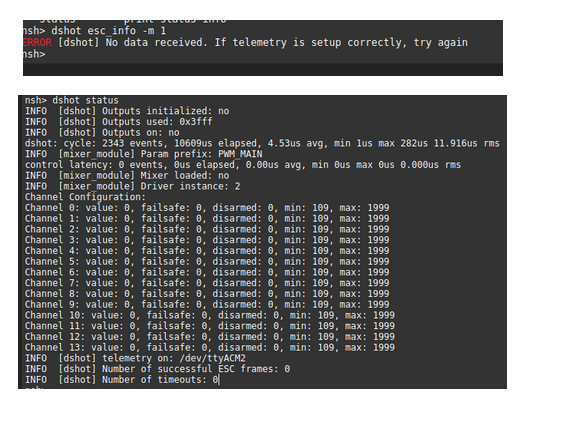
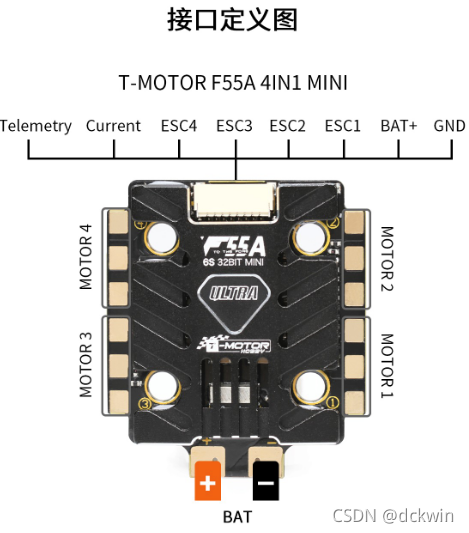
用的是Tmotor的四和一电调,需要额外把电调的telemetry线连接到飞控的telem1端口的RX口。
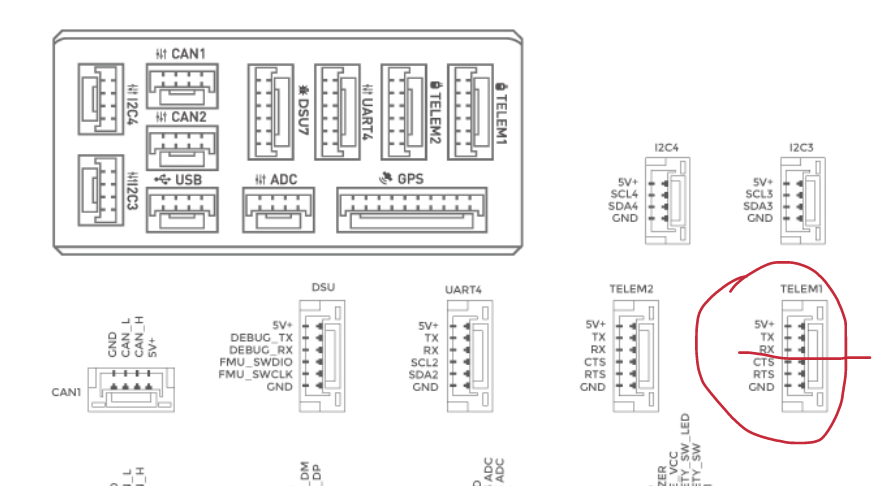
CUAV官网飞控引脚图
然后调试的时候,需要把电源线接上,不然电调没法供电
QGC修改参数:
DSHOT_CONFIG 选择Dshot 600或者能用的Dshot xxx
DSHOT_TEL_CFG(好像是这个名字) 选择TELEM1,因为我把电调引出来的那根线连接到了飞控的TELEM1上,所以需要配置启动。
然后重启QGC ,nsh终端输入dshot即可。
2.3 NUC小电脑无法开机,电源指示灯闪烁三次,每次闪烁一秒,中间停顿一秒,三次闪烁完成后停顿2.5s。模式会重复,直到关闭电源。
官网查找:搜索- Intel.com
交换了上下层内存条的位置,应该是飞飞机摔太多次了,上册内存条摔坏了。、
三、Ubuntu的问题
3.1 windows Ubuntu双系统进不去Ubuntu了
而每次win10升级或恢复都会将linux的启动引导覆盖掉,导致无法进入linux, 所以一直就禁止了win10更新.这几天win10出了点小毛病,所以就狠下心来恢复了系统, 好吧~_~ 这下嗝屁了,ubuntu进不去了
win10+ubuntu双系统修复ubuntu启动引导 - 菜鸟明 - 博客园
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)