无人驾驶-控制-LQR(运动学)
一、车辆建模

二、参考轨迹
- 利用泰勒展开,进行线性化:

- 离散化处理

对离散后的式子进行处理,得到X(k+1)的表达式
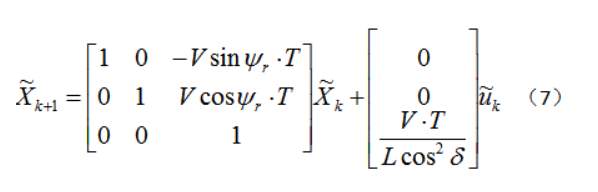
综上:

由于系统矩阵A和输入矩阵B的元素随时间变化,所以上述系统是一个线性时变系统。
三、LQR控制律设计
(1)设计代价函数
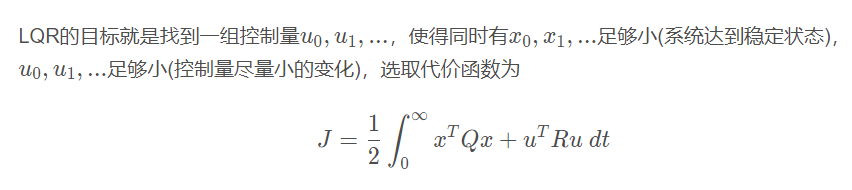 其中,Q、R就是需要设计的半正定矩阵和正定矩阵。
其中,Q、R就是需要设计的半正定矩阵和正定矩阵。
为什么这么设计代价函数?
代价函数J 需要达到最小值,那么在t 趋近于无穷时,状态向量x(t)肯定趋近于0,即是达到了系统稳态;同理,t 趋近于无穷时,控制向量u(t)也会趋近于0,意味着,随着时间的推移,需要对系统施加的控制量会越来越小,意味着使用最小的控制量使得系统达到了最终控制目标。
(2)Q,R矩阵的意义
一般来说,选取Q、R矩阵的时候,为了方便观察各个系统状态量而选取对角阵,增加Q的一个值,意味着这个值作用的系统状态量,将以更快的速度衰减到0,这时候,举个栗子还是很必要的,比如,Q
选取较大的值,会让x 很快的衰减到0;另外一方面,加大R的值,会使得对应的控制量减小,控制器执行更少的动作,意味着系统的状态衰减将变慢。所以,Q ,R的选取,要综合看具体的实际应用场景来调节
四、公式推导

4.1 将u带入cost函数

4.2 假定存在矩阵P

4.3 使能量函数值最小

4.4 对P进行微分展开

整理(8)式,可得到如下:

4.5 获取A,B,Q,P,K,R的等式
【补充公式(3)源头】
此步骤可以表示出,LQR控制的控制量是由状态量获取的,且控制量 u = - Kx


将(3)代入到(9)

4.6 配凑K与R,B,P关系

4.7 由A,B,Q,R已知量求得P,再求出K
(1)由A,B,Q,R已知量求得P

(2)由P求得K

(3)由K求得u控制量
五、总结

六、黎卡提方程求解
黎卡提方程求解.
参考链接
- https://blog.csdn.net/qq_24649627/article/details/104690279
- https://blog.csdn.net/zhouyy858/article/details/107606500
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)