????????????????
欢迎来到本博客
❤️❤️????????
????博主优势:
????????????
博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️
座右铭:
行百里者,半于九十。
????????????
本文目录如下:
????????????
目录
????1 概述
????2 运行结果
????3 参考文献
????4 Simulink仿真实现
????1 概述
五相PMSM是一种具有更高功率密度和更低扭矩脉动的永磁同步电机。速度控制是其重要的研究方向之一,以下是关于五相PMSM速度控制的一些研究内容:
1. 控制策略:研究者可以通过模型预测控制、PID控制、矢量控制等不同的控制策略来实现五相PMSM的速度控制。比较不同控制策略的性能和稳定性,找到最适合五相PMSM的速度控制方法。
2. 磁场定位:五相PMSM的速度控制需要准确的磁场定位,研究者可以通过传感器反馈或者无传感器磁场定位技术来实现准确的磁场定位,从而实现精准的速度控制。
3. 鲁棒性控制:研究者可以研究五相PMSM速度控制系统的鲁棒性,即在外部扰动或者参数变化的情况下,系统能够保持稳定的速度控制性能。
4. 动态响应:研究者可以通过仿真或者实验研究五相PMSM速度控制系统的动态响应特性,包括响应时间、超调量、稳定性等指标。
5. 软件实现:研究者可以设计并实现五相PMSM速度控制系统的软件,包括控制算法、传感器数据采集、通讯接口等功能,从而实现五相PMSM的速度控制。
五相PMSM在所有四个象限的速度控制研究主要涉及到对电机的控制策略、磁场定位、鲁棒性控制、动态响应和软件实现等方面的研究。具体来说,针对不同象限的速度控制,可以进行以下研究:
第一象限:在这个象限,电机的转速和电流都是正值。研究者可以通过模型预测控制、PID控制等策略来实现精准的速度控制,并且需要考虑到电机在正向运动时的动态响应和稳定性。
第二象限:在这个象限,电机的转速是正值,但电流是负值。研究者需要设计适合负电流情况下的控制策略,同时考虑到磁场定位和鲁棒性控制在这种情况下的影响。
第三象限:在这个象限,电机的转速和电流都是负值。研究者需要研究如何在负向运动时实现精准的速度控制,同时考虑到系统的鲁棒性和动态响应。
第四象限:在这个象限,电机的转速是负值,但电流是正值。研究者需要设计适合负转速和正电流情况下的控制策略,同时考虑到软件实现和系统的稳定性。
????
2 运行结果






????3
参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]唐俊.全电飞机用五相PMSM控制系统研究[D].哈尔滨工业大学[2024-01-23].
[2]苏健勇,王岩强,任力帅.五相PMSM开路故障下电流预测控制研究[J]. 2016.
[3]周华伟,叶晨,陈铖,等.基于转子磁链观测器的五相容错PMSM开路故障下的无位置传感器控制[J].电工技术学报, 2023, 38(2):422-434.
????
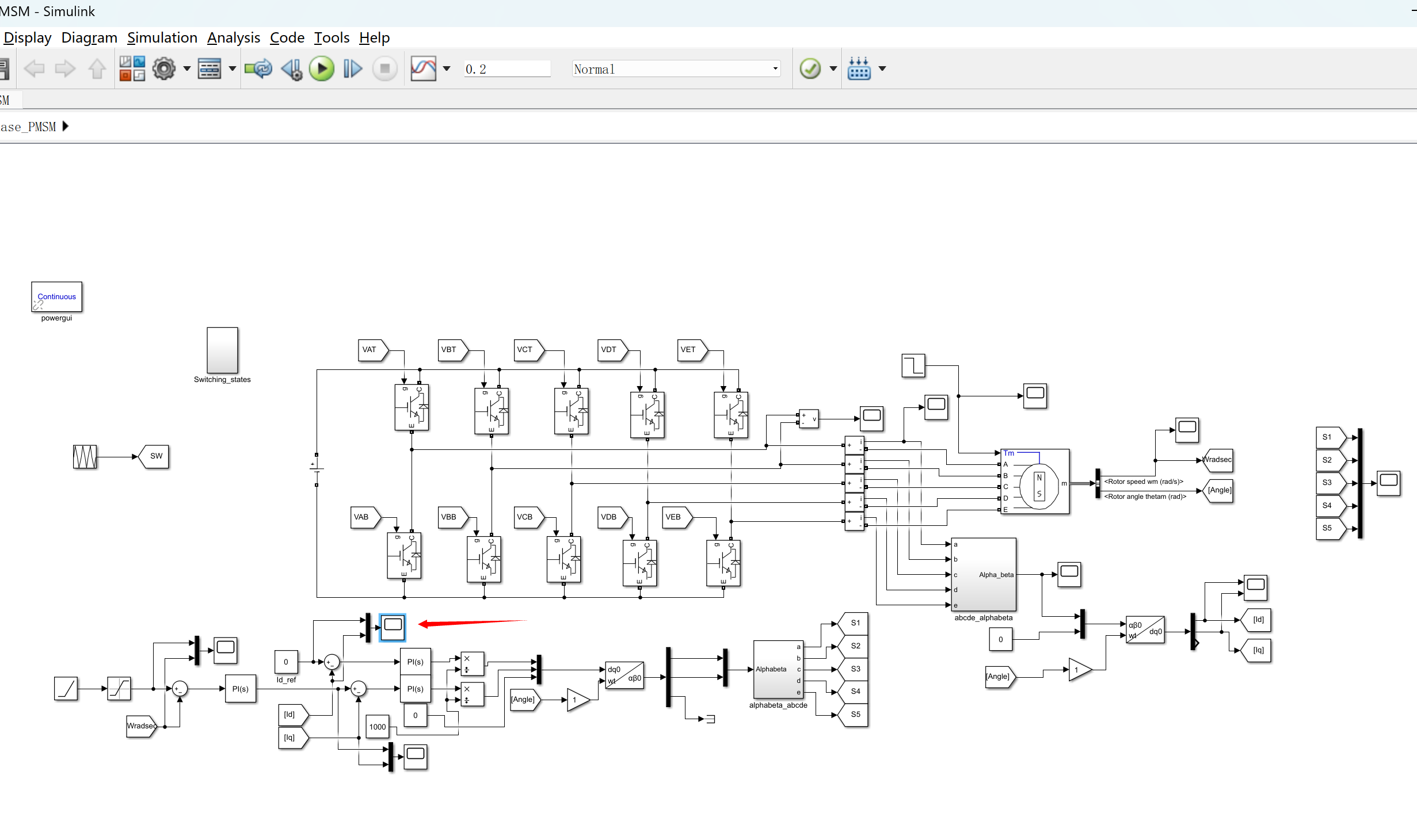
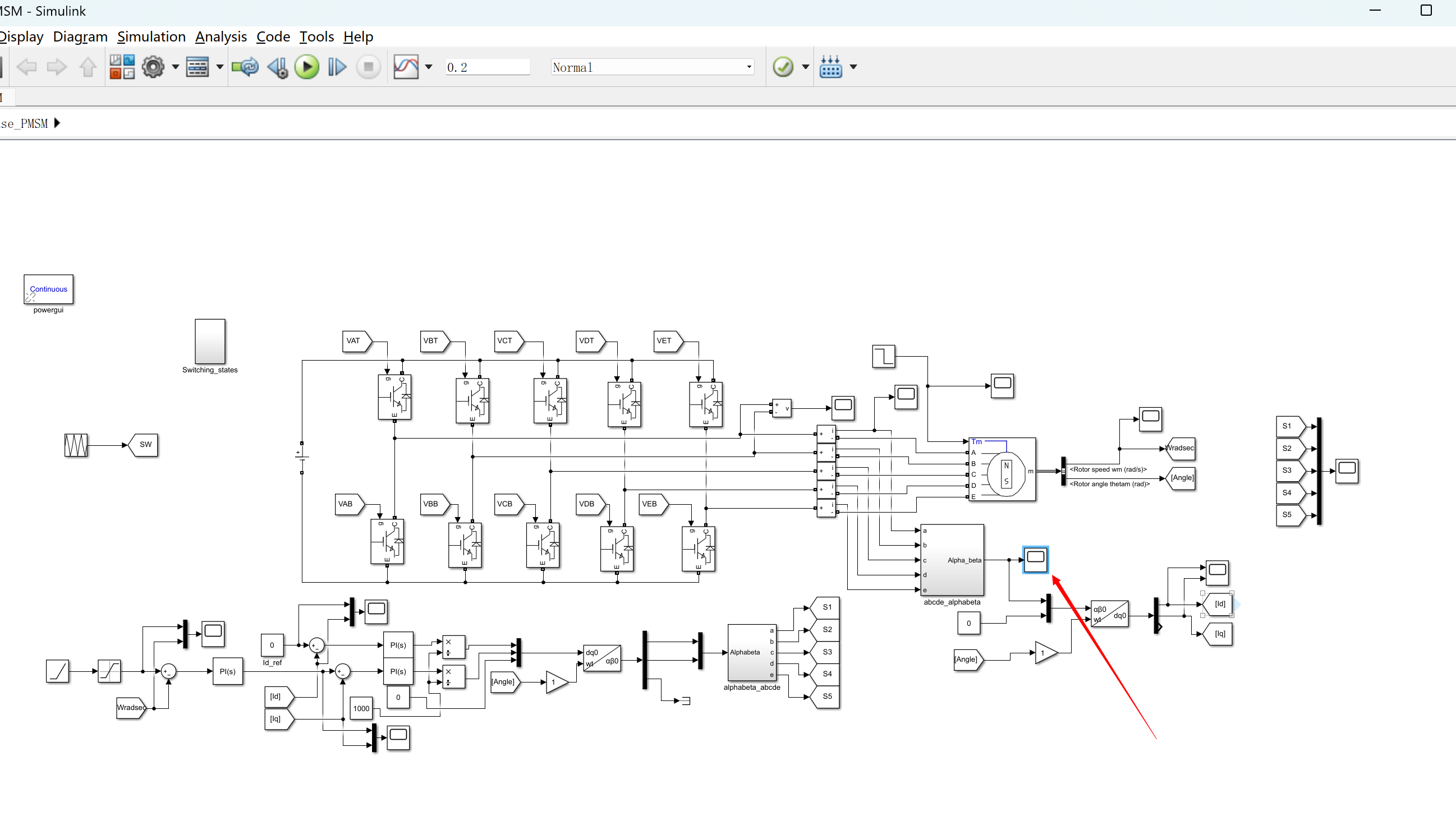
4 Simulink仿真
实现