1、darknet-ros下载及编译
GitHub - leggedrobotics/darknet_ros: YOLO ROS: Real-Time Object Detection for ROS
直接下载zip就行,解压到ros环境下,会有三个文件夹,若darknet是空的,点击以下链接下载
GitHub - leggedrobotics/darknet_ros: YOLO ROS: Real-Time Object Detection for ROS,然后进
行编译。
2、ROS USB驱动安装及运行
ROS USB摄像头驱动下载,然后进行编译。
git clone GitHub - ros-drivers/usb_cam: A ROS Driver for V4L USB Cameras
2.1 编译USB驱动出现如下问题:
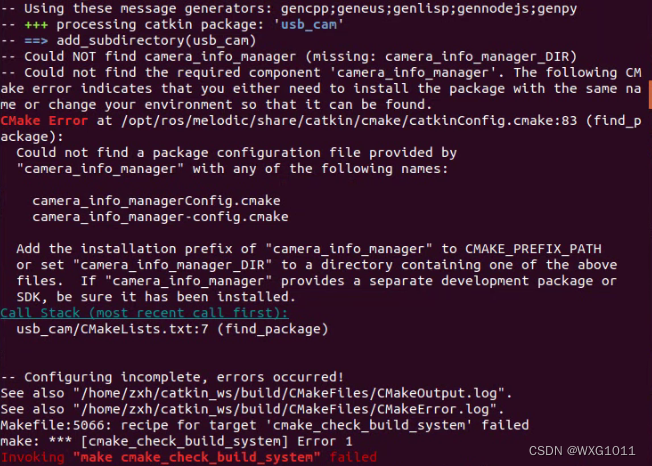
解决方法:
ros(13):ros找不到包报错及解决办法--Config.cmake_biter0088的博客-CSDN博客
sudo apt-get install ros-melodic-camera-info-manager
2.2 运行launch文件,出现如下问题:
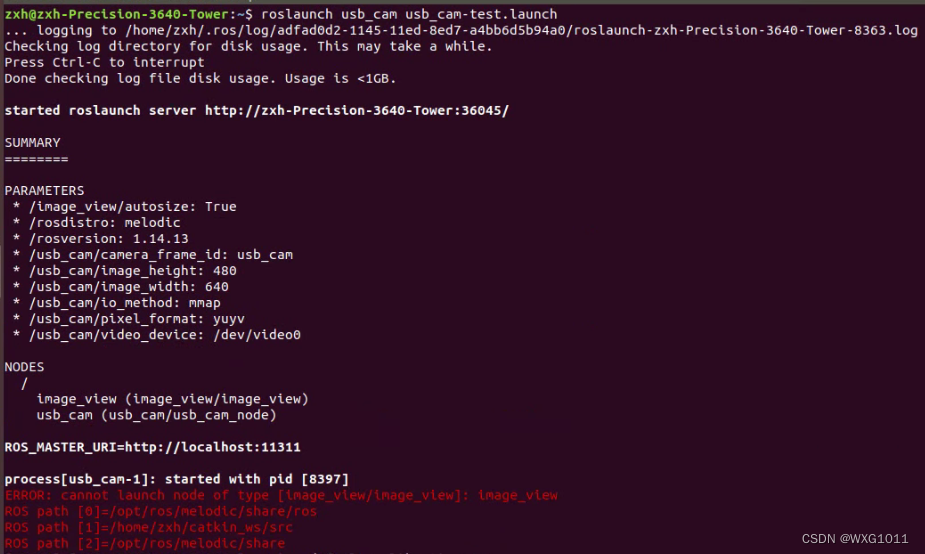
解决方法:
sudo apt-get install ros-melodic-image-view
ERROR: cannot launch node of type [image_view/image_view]: image_viewROS path [0]=/opt/ros/noetic/s_喜欢LYB的博客-CSDN博客
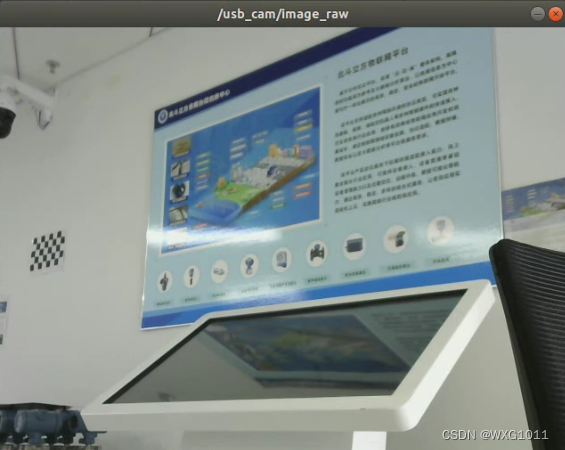
2.3 运行
roslaunch usb_cam usb_cam-test.launch
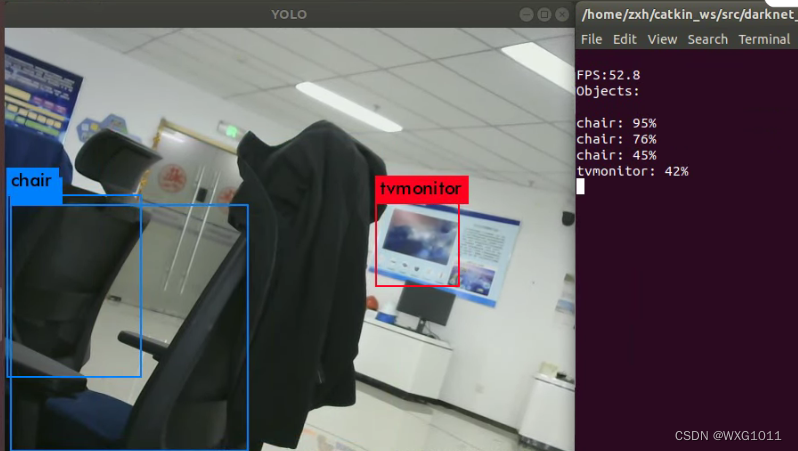
3、darknet_ros程序包运行
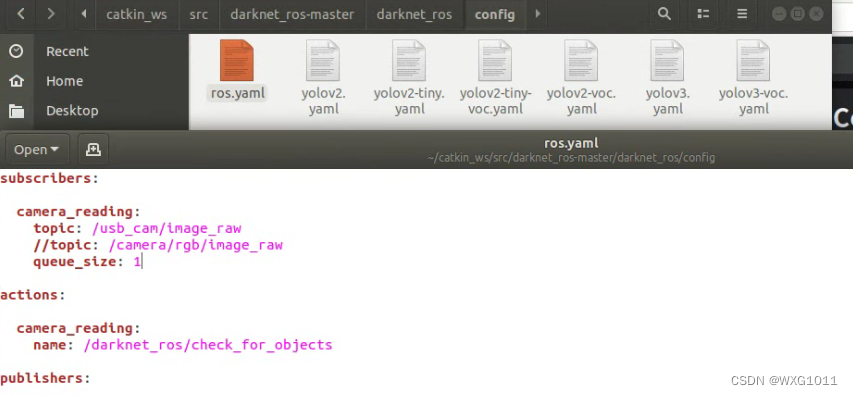
更改配置文件,使得darknet_ros订阅的话题与usb_cam发布的图片话题对应。
打开darknet_ros/config/ros.yaml文件,修改topic如下:
回到darknet工作空间根目录,执行:
source devel/setup.bash
roslaunch darknet_ros darknet_ros.launch
4、其他参数配置
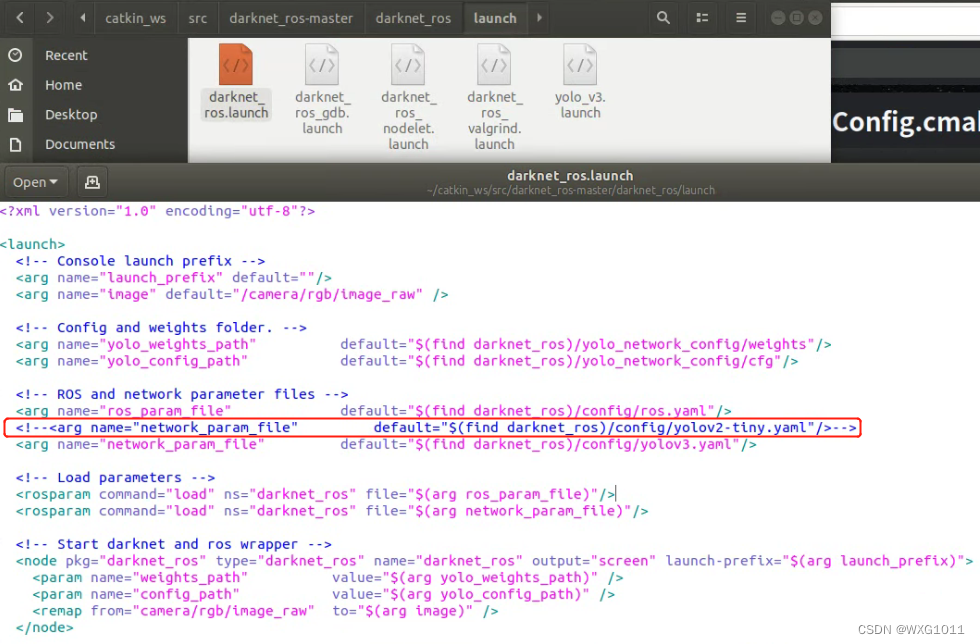
4.1 修改权重文件:
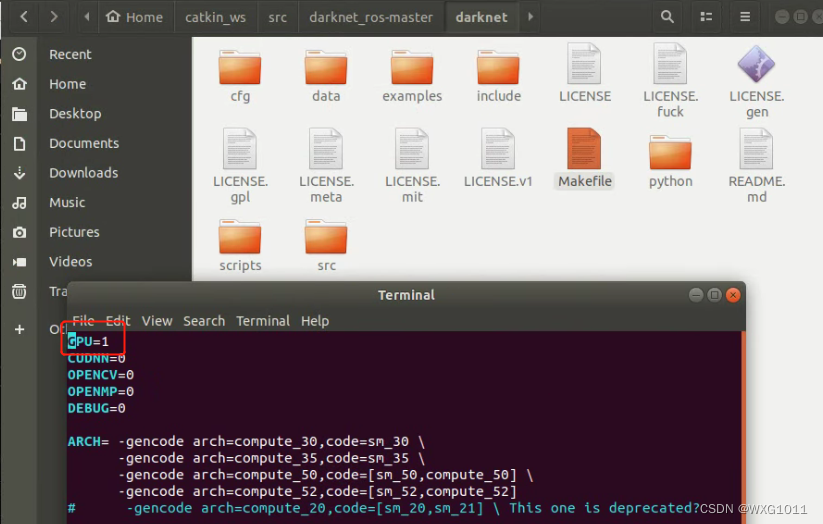
4.2 修改是否使用GPU:
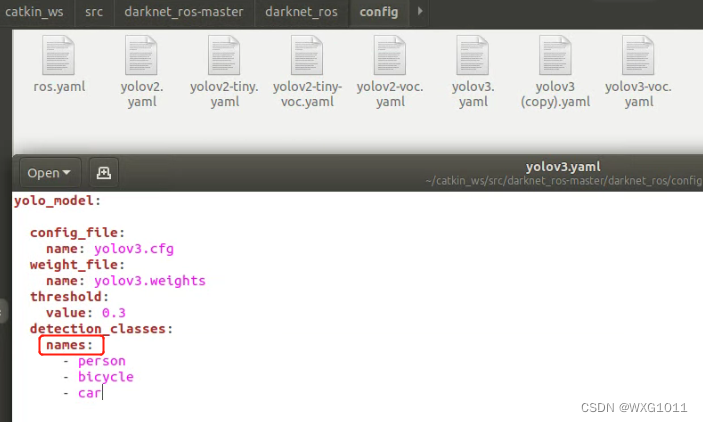
4.3 修改ros.yaml文件中加载相应模型的names值,可按需求识别指定的类型
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)