本文将实现三维空间中的旋转和平移变换,即将三维空间中的一个向量(或者一个空间图形)移动到另一个位置。如下图所示:
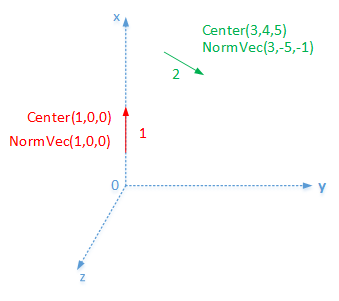
如上图所示,由矢量一移动到矢量二。
三维空间中的移动可以分为旋转和平移。
设矢量一在坐标位置(X0,Y0,Z0) .目标矢量二在坐标位置(X,Y,Z)。
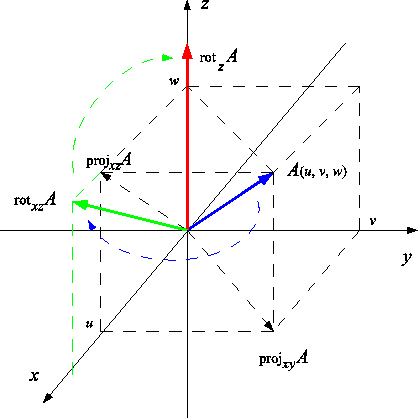
空间任意一个位置的向量移动到与Z轴位置(法失和起点值相同)可以拆分为两步。第一步是绕Z轴旋转到XZ平面,第二步是绕Y轴旋转到Z轴。可以参考如下链接:
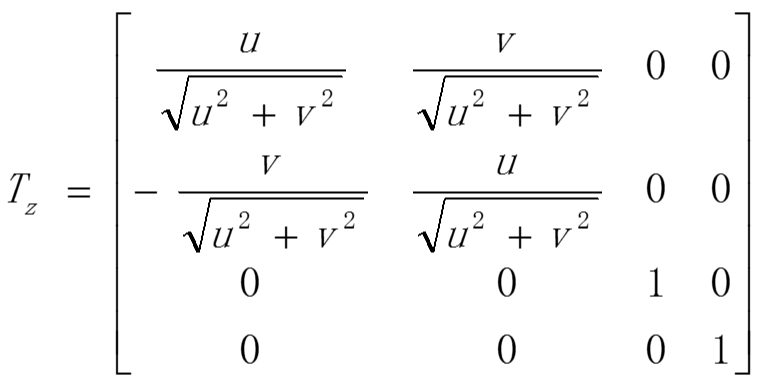
其中,第一步绕Z轴旋转到XZ平面的旋转矩阵如下所示:
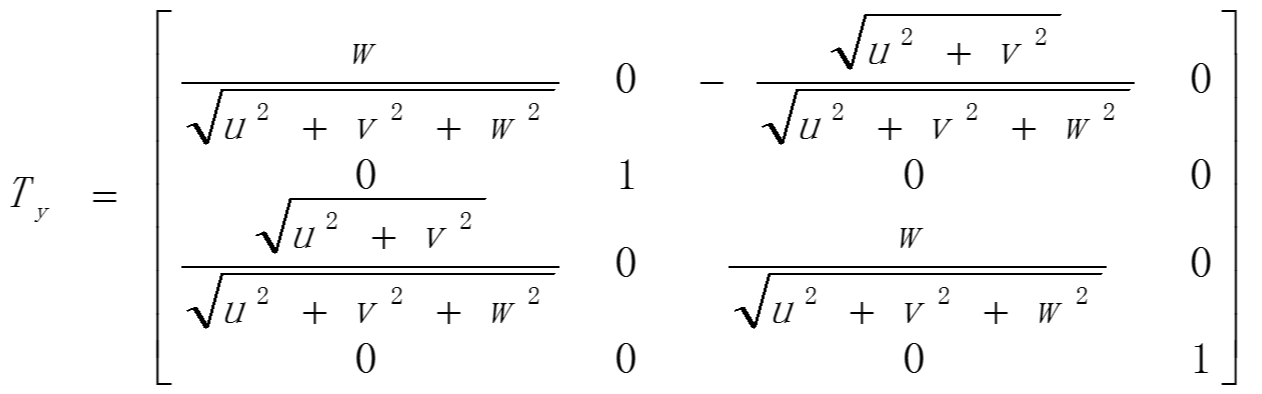
第二步,绕Y轴旋转时,Y的值为0,仅仅在XZ平面内作旋转。旋转矩阵如下:
那么由原点位置任意方向移动到与Z轴正向相同需要经过如下步骤:
(X0,Y0,Z0) = Ty (Tz *(X,Y, Z))
即(X0,Y0,Z0) = Ty Tz (X,Y, Z)
因为任意矢量先要绕Z轴旋转,再绕Y轴旋转 所以为TyTz
那么,现在要将在Z轴正向的矢量移动到空间任意位置 只需要将上式求逆即可
具体如下:
(X,Y, Z) = (Ty Tz)^-1 (X0,Y0,Z0)
即

设空间任意向量法失归一化后表示为u v w
那么
</pre><pre name="code" class="cpp"> a1 = u/sqrt(u*u + v*v);
a2 = v/sqrt(u*u + v*v);
a3 = w/sqrt(u*u + v*v + w*w);
a4 = sqrt(u*u + v*v) / sqrt(u*u + v*v + w*w);
Tz = [ a1 a2 0
-a2 a1 0
0 0 1];
Ty = [ a3 0 -a4
0 1 0
a4 0 a3];
TyTz = [ a1*a3 a2*a3 -a4
-a2 a1 0
a1*a4 a2*a4 a3
];
所以Tz^-1*Ty^-1 = (TyTz)^-1 = (TyTz)^T(这里因为是单位正交矩阵,所以求逆等于求转置)
= [a1*a3 -a2 a1*a4
a2*a3 a1 a2*a4
-a4 0 a3];
最后利用公式即可得到旋转后的矩阵。即
(X,Y, Z) = (Ty Tz)^-1 (X0,Y0,Z0)
实验验证:
定义空间任意位置圆心参数:
center = [3 4 5]';
normVec0 = [3 -5 -1];
radius = 1;
numPts0 = 100;
目标位置为:
center0 = [0 0 1]‘;
normVec = [0 0 1];
代码如下:
clear;close all;
center = [3 4 5]';
normVec0 = [3 -5 -1];
normVec0 = - normVec0 / sqrt(sum(normVec0.^2));
radius = 1;
numPts0 = 100;
normalVec = normVec0;
d = sqrt( sum(normalVec.^2) );
u = normalVec(1) / d;
v = normalVec(2) / d;
w = normalVec(3) / d;
a1 = u/sqrt(u*u + v*v);
a2 = v/sqrt(u*u + v*v);
a3 = w/sqrt(u*u + v*v + w*w);
a4 = sqrt(u*u + v*v) / sqrt(u*u + v*v + w*w);
Tz = [ a1 a2 0
-a2 a1 0
0 0 1];
Ty = [ a3 0 -a4
0 1 0
a4 0 a3];
invTransMat = Ty*Tz;
transMat = inv(invTransMat);
pi = 3.141592653;
theta = linspace(0, 2*pi, numPts0);
X = radius * cos(theta);
Y = radius * sin(theta);
Z = zeros(1, length(X));
%circlePts0 = bsxfun(@plus, [X; Y; Z], center);
circlePts0 = [X; Y; Z];
circlePts = bsxfun(@plus, transMat * [X; Y; Z], center);
figure;
plot3(circlePts0(1, :), circlePts0(2, :), circlePts0(3, :));grid on;
hold on;
plot3(circlePts(1, :), circlePts(2, :), circlePts(3, :));grid on;
hold on;
结果如下:
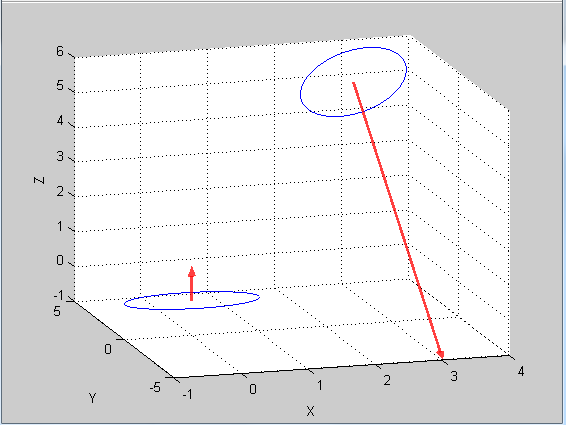
箭头是我自己加上去的:绘制箭头的参考代码如下:
function h = mArrow3(p1,p2,varargin)
%mArrow3 - plot a 3D arrow as patch object (cylinder+cone)
%
% syntax: h = mArrow3(p1,p2)
% h = mArrow3(p1,p2,'propertyName',propertyValue,...)
%
% with: p1: starting point
% p2: end point
% properties: 'color': color according to MATLAB specification
% (see MATLAB help item 'ColorSpec')
% 'stemWidth': width of the line
% 'tipWidth': width of the cone
%
% Additionally, you can specify any patch object properties. (For
% example, you can make the arrow semitransparent by using
% 'facealpha'.)
%
% example1: h = mArrow3([0 0 0],[1 1 1])
% (Draws an arrow from [0 0 0] to [1 1 1] with default properties.)
%
% example2: h = mArrow3([0 0 0],[1 1 1],'color','red','stemWidth',0.02,'facealpha',0.5)
% (Draws a red semitransparent arrow with a stem width of 0.02 units.)
%
% hint: use light to achieve 3D impression
%
propertyNames = {'edgeColor'};
propertyValues = {'none'};
%% evaluate property specifications
for argno = 1:2:nargin-2
switch varargin{argno}
case 'color'
propertyNames = {propertyNames{:},'facecolor'};
propertyValues = {propertyValues{:},varargin{argno+1}};
case 'stemWidth'
if isreal(varargin{argno+1})
stemWidth = varargin{argno+1};
else
warning('mArrow3:stemWidth','stemWidth must be a real number');
end
case 'tipWidth'
if isreal(varargin{argno+1})
tipWidth = varargin{argno+1};
else
warning('mArrow3:tipWidth','tipWidth must be a real number');
end
otherwise
propertyNames = {propertyNames{:},varargin{argno}};
propertyValues = {propertyValues{:},varargin{argno+1}};
end
end
%% default parameters
if ~exist('stemWidth','var')
ax = axis;
if numel(ax)==4
stemWidth = norm(ax([2 4])-ax([1 3]))/300;
elseif numel(ax)==6
stemWidth = norm(ax([2 4 6])-ax([1 3 5]))/300;
end
end
if ~exist('tipWidth','var')
tipWidth = 3*stemWidth;
end
tipAngle = 22.5/180*pi;
tipLength = tipWidth/tan(tipAngle/2);
ppsc = 50; % (points per small circle)
ppbc = 250; % (points per big circle)
%% ensure column vectors
p1 = p1(:);
p2 = p2(:);
%% basic lengths and vectors
x = (p2-p1)/norm(p2-p1); % (unit vector in arrow direction)
y = cross(x,[0;0;1]); % (y and z are unit vectors orthogonal to arrow)
if norm(y)<0.1
y = cross(x,[0;1;0]);
end
y = y/norm(y);
z = cross(x,y);
z = z/norm(z);
%% basic angles
theta = 0:2*pi/ppsc:2*pi; % (list of angles from 0 to 2*pi for small circle)
sintheta = sin(theta);
costheta = cos(theta);
upsilon = 0:2*pi/ppbc:2*pi; % (list of angles from 0 to 2*pi for big circle)
sinupsilon = sin(upsilon);
cosupsilon = cos(upsilon);
%% initialize face matrix
f = NaN([ppsc+ppbc+2 ppbc+1]);
%% normal arrow
if norm(p2-p1)>tipLength
% vertices of the first stem circle
for idx = 1:ppsc+1
v(idx,:) = p1 + stemWidth*(sintheta(idx)*y + costheta(idx)*z);
end
% vertices of the second stem circle
p3 = p2-tipLength*x;
for idx = 1:ppsc+1
v(ppsc+1+idx,:) = p3 + stemWidth*(sintheta(idx)*y + costheta(idx)*z);
end
% vertices of the tip circle
for idx = 1:ppbc+1
v(2*ppsc+2+idx,:) = p3 + tipWidth*(sinupsilon(idx)*y + cosupsilon(idx)*z);
end
% vertex of the tiptip
v(2*ppsc+ppbc+4,:) = p2;
% face of the stem circle
f(1,1:ppsc+1) = 1:ppsc+1;
% faces of the stem cylinder
for idx = 1:ppsc
f(1+idx,1:4) = [idx idx+1 ppsc+1+idx+1 ppsc+1+idx];
end
% face of the tip circle
f(ppsc+2,:) = 2*ppsc+3:(2*ppsc+3)+ppbc;
% faces of the tip cone
for idx = 1:ppbc
f(ppsc+2+idx,1:3) = [2*ppsc+2+idx 2*ppsc+2+idx+1 2*ppsc+ppbc+4];
end
%% only cone v
else
tipWidth = 2*sin(tipAngle/2)*norm(p2-p1);
% vertices of the tip circle
for idx = 1:ppbc+1
v(idx,:) = p1 + tipWidth*(sinupsilon(idx)*y + cosupsilon(idx)*z);
end
% vertex of the tiptip
v(ppbc+2,:) = p2;
% face of the tip circle
f(1,:) = 1:ppbc+1;
% faces of the tip cone
for idx = 1:ppbc
f(1+idx,1:3) = [idx idx+1 ppbc+2];
end
end
%% draw
fv.faces = f;
fv.vertices = v;
h = patch(fv);
for propno = 1:numel(propertyNames)
try
set(h,propertyNames{propno},propertyValues{propno});
catch
disp(lasterr)
end
end
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)