一般摄像机简化为小孔成像的理想模型(线性模型),因为摄像机镜头(视场角)很小,相当于被拍摄物体通过小孔投影到感光元件CCD/CMOS上。
对于加了各种镜头的摄像机,镜头不是平面(凸镜凹镜),小孔成像的像发生畸变,属于非线性模型,需要额外矫正。
通过标定可求出摄像机各种内外参数,也包括镜头畸变。
小孔成像和相机成像略有不同。
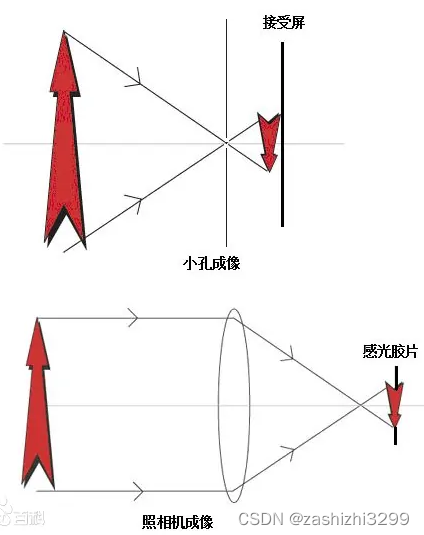
1、理想线性摄像机小孔成像示意图
下图为相机成像。


如图,小孔成像能否看到倒立的像,取决于物体和孔的距离,以及感光板与孔的距离,按图中公式计算。其中f是焦距。
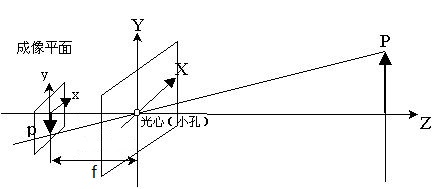
上2个图,为成像模型实际情况,像p与物体P分别位于小孔两侧,且是倒立成像,不利于观看。
2、坐标系转换
坐标转换就是,通过坐标系参数矩阵变换,该用实际物体3D坐标表示2D图片像素点,变换矩阵就是摄像机的内参。
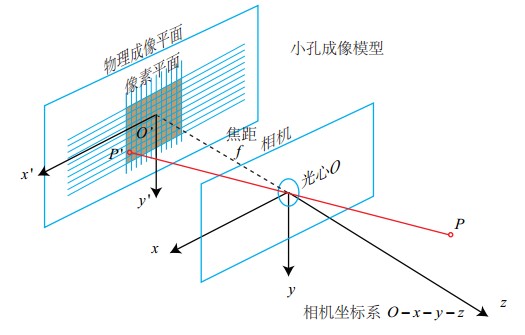
下图,将倒立的像p颠倒并平移到小孔o的另一边,跟实际物体在一边成比例,且为正向,方便画图。

①世界坐标系:是客观三维世界的绝对坐标系,也称客观坐标系。物体实际坐标,用(Xw, Yw, Zw)表示其坐标值。
②相机坐标系(光心坐标系):以相机的光心(小孔圆心)为坐标原点,X 轴和Y 轴分别平行于图像坐标系的 X 轴和Y 轴,相机的光轴为Z 轴,用(Xc, Yc, Zc)表示其坐标值。
③图像坐标系:以CCD 图像平面的中心为坐标原点,X轴和Y 轴分别平行于图像平面的两条垂直边,用( x , y )表示其坐标值。图像坐标系是用物理单位(例如毫米)表示像素在图像中的位置。
④像素坐标系:以 CCD 图像平面的左上角顶点为原点,X 轴和Y 轴分别平行于图像坐标系的 X 轴和Y 轴,用(u , v )表示其坐标值。数码相机采集的图像首先是形成标准电信号的形式,然后再通过模数转换变换为数字图像。每幅图像的存储形式是M × N的数组,M 行 N 列的图像中的每一个元素的数值代表的是图像点的灰度。这样的每个元素叫像素,像素坐标系就是以像素为单位的图像坐标系。
如下图,是2个坐标系:④像素坐标系uv和③图像坐标系xyimg。

3、张正友标定算法calibration
”张正友标定”是指张正友教授1998年提出的单平面棋盘格的摄像机标定方法。文中提出的方法介于传统标定法和自标定法之间,但克服了传统标定法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。同时也相对于自标定而言,提高了精度,便于操作。因此张氏标定法被广泛应用于计算机视觉方面。
标定参数包括内参和外参。内参表示相机本身参数,外参表示拍摄每一张照片时的相机位置姿态等外部参数。

传统标定
下图,已知拍好的照片和实际物体的3D坐标,反推相机参数。需要的高精度标定物。
张氏标定步骤
- 打印一张棋盘格A4纸张(黑白间距已知),并贴在一个平板上
- 对棋盘格拍摄若干张图片(一般10-20张)
- 在图片中检测特征点(Harris特征)
- 利用解析解估算方法计算出5个内部参数,以及6个外部参数
- 根据极大似然估计策略,设计优化目标并实现参数的refinement改善
张氏标定原理
1、成像数学模型表示
图片二维点![m=[u,v]^T](https://latex.codecogs.com/gif.latex?m%3D%5Bu%2Cv%5D%5ET) ,真实三维点
,真实三维点![M=[X,Y,Z]^T](https://latex.codecogs.com/gif.latex?M%3D%5BX%2CY%2CZ%5D%5ET) 。增广向量
。增广向量![\tilde{m}=[u,v,1]^T](https://latex.codecogs.com/gif.latex?%5Ctilde%7Bm%7D%3D%5Bu%2Cv%2C1%5D%5ET) ,
,![\tilde{M}=[X,Y,Z,1]^T](https://latex.codecogs.com/gif.latex?%5Ctilde%7BM%7D%3D%5BX%2CY%2CZ%2C1%5D%5ET) ,摄像机用小孔成像得到3维M到2维m的投影公式:
,摄像机用小孔成像得到3维M到2维m的投影公式:
![s\tilde{m}=A[R,t]\tilde{M},A=\begin{bmatrix} \alpha &\gamma& u_{0}\\ 0 & \beta & v_{0}\\ 0&0 & 1 \end{bmatrix}](https://latex.codecogs.com/gif.latex?s%5Ctilde%7Bm%7D%3DA%5BR%2Ct%5D%5Ctilde%7BM%7D%2CA%3D%5Cbegin%7Bbmatrix%7D%20%5Calpha%20%26%5Cgamma%26%20u_%7B0%7D%5C%5C%200%20%26%20%5Cbeta%20%26%20v_%7B0%7D%5C%5C%200%260%20%26%201%20%5Cend%7Bbmatrix%7D)
s是任意比例因子,[R,t]为外部参数:旋转矩阵和位移矩阵。A为相机内部参数矩阵,α和β是图像轴(焦距)的比例因子,γ是两个图像轴之间(传感器轴和光轴)的夹角(当安装准确时γ=0),(u0,v0)是2D图像的中心点。
假设M在坐标轴z=0上,上面的投影公式改写为:

M可以改写为 ,所以三维点M和二维点m可以通过3*3单应性矩阵H(Homography matrix)描述:
,所以三维点M和二维点m可以通过3*3单应性矩阵H(Homography matrix)描述:

单目相机的PnP问题。已知物体3D坐标,和图片2D坐标,相机内参已知,求解相机外参,也就是相机的位姿的问题。
4、畸变参数确定
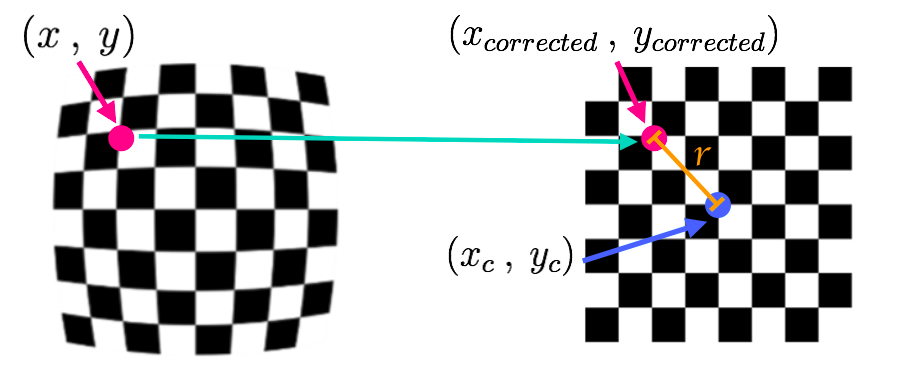
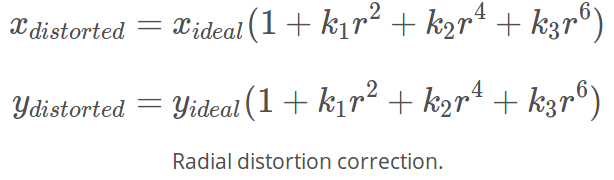
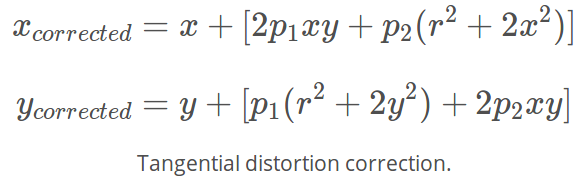
径向畸变系数为k1, k2, k3,切向畸变系数为p1, p2,可以通过如下两个方程求得:
径向畸变计算方程:
切向畸变计算方程:
2D点和3D点的变换

- 投影变换:8自由度,将图像转换为不同的投影
- 仿射变换:6自由度,转换将保留原图像平行线的图像
- 相似变换:4自由度,旋转和缩放原图像
- 欧几里得变换:3自由度,旋转原图像
下图为2D和3D的变换等级,矩阵,自由度等


齐次坐标
齐次坐标就是将一个原本是n维的向量用一个n+1维向量来表示。
在一个2D笛卡尔坐标末尾加上一个额外的变量w来形成2D齐次坐标,因此,一个点(X,Y)在齐次坐标里面变成了(x,y,w),并且有X = x/w,Y = y/w。
使用齐次坐标,可以表示平行线在透视空间的无穷远处交于一点。欧式坐标无法表示。
例如,笛卡尔坐标系下(1,2)的齐次坐标可以表示为(1,2,1),如果点(1,2)移动到无限远处,它的齐次坐标表示为(1,2,0),在笛卡尔坐标下它变为(∞,∞),因为(1/0, 2/0) = (∞,∞)。
单应矩阵H(Homography)
单应矩阵约束了同一3D空间点在两个像素平面的2D齐次坐标。例如,两个相机对同一物体拍照,通过相机参数和单应矩阵能互相推算。
用公式表示:
即:
符号 表示单应矩阵H约束了qa和qb同方向,但没有约束尺度大小。可通过叉乘消去齐次的尺度因子:
表示单应矩阵H约束了qa和qb同方向,但没有约束尺度大小。可通过叉乘消去齐次的尺度因子: ,
,
再通过两个相机的外参旋转平移(R,t),和两个相机的内参K1、K2,和3D点所在平面参数法向量和距离(n,d),计算单应矩阵:
单应矩阵应用举例:将第2个图片放入第1个图片的广告版中



参考文献:
1、从零开始一起学习SLAM | 相机成像模型 - electech6的博客 - CSDN博客 https://blog.csdn.net/electech6/article/details/83617892
2、SLAM入门之视觉里程计(2):相机模型(内参数,外参数) - Brook_icv - 博客园 https://www.cnblogs.com/wangguchangqing/p/8126333.html
3、【3D视觉工坊】第二期公开课:相机标定的基本原理与经验分享_哔哩哔哩_bilibili https://www.bilibili.com/video/BV1R7411m7ZQ
4、张正友标定算法原理详解 - 简书 https://www.jianshu.com/p/9d2fe4c2e3b7
5、张正友相机标定法原理与实现_Eating Lee-CSDN博客_张正友标定法原理 https://blog.csdn.net/qq_40369926/article/details/89251296
6、谭平--从相机标定到SLAM,极简三维视觉六小时课程视频_哔哩哔哩_bilibili https://www.bilibili.com/video/BV124411W775/?p=2&spm_id_from=pageDriver
7、无人驾驶传感器融合系列(十一)—— 相机内参标定_默_存的博客-CSDN博客 https://blog.csdn.net/weixin_40215443/article/details/98478019
8、张正友标定法翻译_heroacool的专栏-CSDN博客_张正友标定法论文 https://blog.csdn.net/heroacool/article/details/50286677
9、《Computer Vision_ Algorithms and Applications-Richard Szeliski》第二章 image formation
10、单应矩阵的推导与理解 - 知乎 https://zhuanlan.zhihu.com/p/138266214
11、图像处理之理解Homography matrix(单应性矩阵) - 云+社区 - 腾讯云 https://cloud.tencent.com/developer/article/1084332
12、
13、
14、
15、
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)