刚体连续运动位置综合相当于已知刚体
Σ
*
\Sigma \text{*}
Σ*运动坐标系
{
O
m
,
i
⃗
m
,
j
⃗
m
}
\{{{O}_{m}},{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{Om,im,jm}相对固定机架上坐标系
{
O
f
,
i
⃗
f
,
j
⃗
f
}
\{{{O}_{f}},{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{Of,if,jf}的运动,或运动刚体坐标系
{
O
m
,
i
⃗
m
,
j
⃗
m
}
\{{{O}_{m}},{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{Om,im,jm}的坐标原点
O
m
{{O}_{m}}
Om在固定机架上坐标系
{
O
f
,
i
⃗
f
,
j
⃗
f
}
\{{{O}_{f}},{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{Of,if,jf}中的连续轨迹曲线
Γ
O
m
{{\Gamma }_{Om}}
ΓOm,以及标矢
i
⃗
m
{{{\vec{i}}}_{m}}
im在固定坐标系
{
O
f
,
i
⃗
f
,
j
⃗
f
}
\{{{O}_{f}},{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{Of,if,jf}中方向角
γ
\gamma
γ的连续函数∶
R
⃗
O
m
(
s
)
=
x
O
m
(
s
)
i
⃗
f
+
y
O
m
(
s
)
j
⃗
f
,
γ
=
γ
(
s
)
{{{\vec{R}}}_{Om}}(s)={{x}_{Om}}(s){{{\vec{i}}}_{f}}+{{y}_{Om}}(s){{{\vec{j}}}_{f}},\gamma =\gamma (s)
ROm(s)=xOm(s)if+yOm(s)jf,γ=γ(s) 式中
s
s
s为轨迹曲线
Γ
O
m
{{\Gamma }_{Om}}
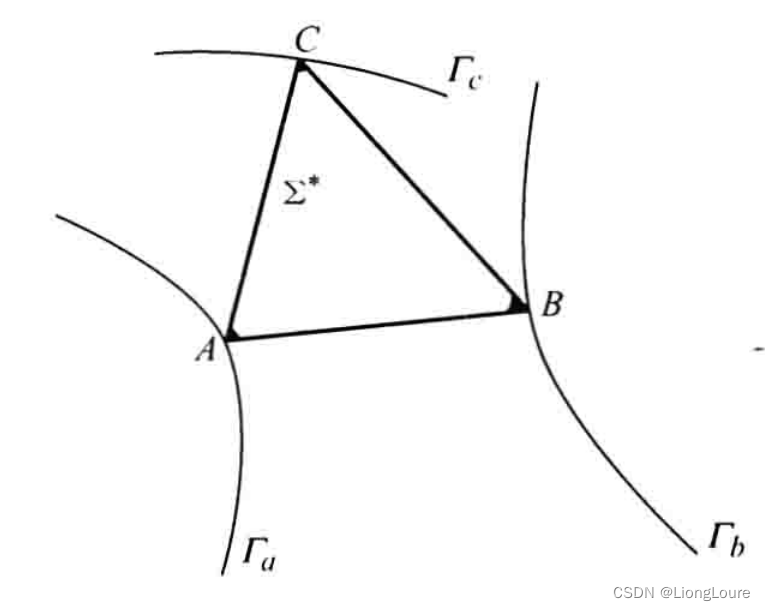
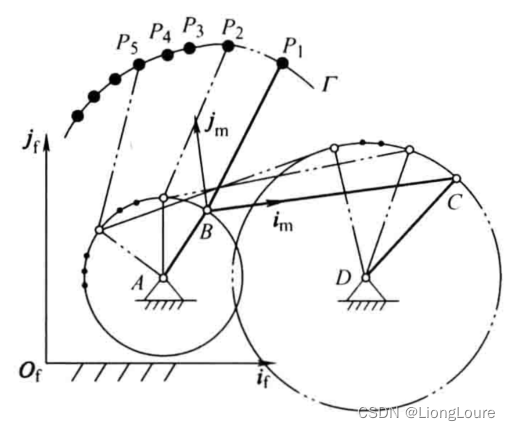
ΓOm的弧长参数。用解析方法求解出实现该运动的连杆机构应该说是一种理想追求,理应按照给定刚体运动性质所对应的连杆运动用简单的连杆机构来实现。例如,运动刚体上存在两个圆点的全铰链四杆机构,运动刚体上存在一个圆点和一个滑点的曲柄滑块机构,运动刚体上存在一个圆点以及固定刚体上存在一个滑点的曲柄摇块机构。但实际上迄今并没有研究清楚各种类型连杆机构能呈现什么样的具体运动,或者说,用什么样的连杆机构能够实现什么样的给定刚体运动尚缺少理论依据。
S.Roberts(1871)曾以两条分别为
n
a
{{n}_{a}}
na和
n
b
{{n}_{b}}
nb阶的代数曲线
Γ
a
{{\Gamma }_{a}}
Γa和
Γ
b
{{\Gamma }_{b}}
Γb作导向曲线,下图所示。
运动刚体
Σ
*
\Sigma \text{*}
Σ*上两点
A
A
A和
B
B
B分别沿两个导向曲线
Γ
a
{{\Gamma }_{a}}
Γa和
Γ
b
{{\Gamma }_{b}}
Γb滑动,那么,运动刚体
Σ
*
\Sigma \text{*}
Σ*作平面运动时,其上点
C
C
C在固定平面上的运动轨迹是一曲线
Γ
c
{{\Gamma }_{c}}
Γc(滑动曲线),其阶数不高于
2
n
a
n
b
2{{n}_{a}}{{n}_{b}}
2nanb。对于常见的全铰链四杆机构,其导向曲线都是圆,即二次代数曲线,那么,连杆曲线是六次代数曲线;而曲柄滑块机构连杆曲线则是四次代数曲线;对于含双滑块的椭圆机构上的连杆曲线自然就只是二次代数曲线 了。因此,连杆机构(含简单四杆机构)的运动类型特征、范围与尺度的映射性质还有待研究,从而为机构运动综合解的存在性提供理论基础。
采用第1章中的相伴运动方法,在固定机架坐标系
{
O
f
,
i
⃗
f
,
j
⃗
f
}
\{{{O}_{f}},{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{Of,if,jf}中,以运动刚体坐标系
{
O
m
,
i
⃗
m
,
j
⃗
m
}
\{{{O}_{m}},{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{Om,im,jm}原点
O
m
{{O}_{m}}
Om的轨迹曲线
Γ
O
m
{{\Gamma }_{Om}}
ΓOm为原曲线,考察运动刚体上的点
P
P
P在固定坐标系中的轨迹曲线
Γ
P
{{\Gamma }_{P}}
ΓP,把
Γ
P
{{\Gamma }_{P}}
ΓP作为原曲线
Γ
O
m
{{\Gamma }_{Om}}
ΓOm的相伴曲线来建立机构运动综合解析模型。犹如S.Roberts 以一条滑动导向曲线
Γ
a
{{\Gamma }_{a}}
Γa为原曲线,运动刚体
Σ
*
\Sigma \text{*}
Σ*沿导向曲线
Γ
a
{{\Gamma }_{a}}
Γa滑动和相对曲线
Γ
a
{{\Gamma }_{a}}
Γa上
A
A
A点转动,那么,运动刚体
Σ
*
\Sigma \text{*}
Σ*的运动完全确定。而另一条滑动导向曲线
Γ
b
{{\Gamma }_{b}}
Γb是原曲线
Γ
a
{{\Gamma }_{a}}
Γa的相伴曲线,特殊地,相伴曲线
Γ
b
{{\Gamma }_{b}}
Γb也是圆,那么
B
B
B点在刚体
Σ
*
\Sigma \text{*}
Σ*上是否存在?倘若存在,其位置在何处?
对于运动刚体
Σ
*
\Sigma \text{*}
Σ*坐标系
{
O
m
,
i
⃗
m
,
j
⃗
m
}
\{{{O}_{m}},{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{Om,im,jm}中直角坐标为
(
x
P
m
,
y
P
m
)
({{x}_{Pm}},{{y}_{Pm}})
(xPm,yPm)的点
P
P
P,其在固定坐标系中的矢量方程可确定为∶
R
⃗
P
=
R
⃗
O
m
+
(
x
P
m
cos
γ
−
y
P
m
sin
γ
)
i
⃗
f
+
(
x
P
m
sin
γ
+
y
P
m
cos
γ
)
j
⃗
f
{{{\vec{R}}}_{P}}={{{\vec{R}}}_{Om}}+({{x}_{Pm}}\cos \gamma -{{y}_{Pm}}\sin \gamma ){{{\vec{i}}}_{f}}+({{x}_{Pm}}\sin \gamma +{{y}_{Pm}}\cos \gamma ){{{\vec{j}}}_{f}}
RP=ROm+(xPmcosγ−yPmsinγ)if+(xPmsinγ+yPmcosγ)jf 将上式对原曲线
Γ
O
m
{{\Gamma }_{Om}}
ΓOm孤长参数
s
s
s连续求导,应用第1章中式(1.74c)可得到
P
P
P点轨迹曲线
Γ
P
{{\Gamma }_{P}}
ΓP的相对曲率
k
p
{{k}_{p}}
kp为∶
{
k
p
=
F
G
F
=
(
x
P
m
−
a
)
2
+
(
y
P
m
−
b
)
2
−
D
4
G
=
[
(
x
P
m
+
sin
θ
k
O
m
−
θ
˙
)
2
+
(
y
P
m
−
cos
θ
k
O
m
−
θ
˙
)
2
]
3
2
\left\{ \begin{matrix} {{k}_{p}}=\frac{F}{G} \\ F={{({{x}_{Pm}}-a)}^{2}}+{{({{y}_{Pm}}-b)}^{2}}-\frac{D}{4} \\ G={{[{{({{x}_{Pm}}+\frac{\sin \theta }{{{k}_{Om}}-\dot{\theta }})}^{2}}+{{({{y}_{Pm}}-\frac{\cos \theta }{{{k}_{Om}}-\dot{\theta }})}^{2}}]}^{\frac{3}{2}}} \\ \end{matrix} \right.
⎩⎨⎧kp=GFF=(xPm−a)2+(yPm−b)2−4DG=[(xPm+kOm−θ˙sinθ)2+(yPm−kOm−θ˙cosθ)2]23 式中,
k
O
m
{{k}_{Om}}
kOm为原曲线
Γ
O
m
{{\Gamma }_{Om}}
ΓOm的相对曲率,
θ
\theta
θ为原曲线
Γ
O
m
{{\Gamma }_{Om}}
ΓOm上Frenet标架
{
R
⃗
O
m
;
α
⃗
,
β
⃗
}
\{{{{\vec{R}}}_{Om}};\vec{\alpha },\vec{\beta }\}
{ROm;α,β}中标矢
α
⃗
{\vec{\alpha }}
α在运动坐标系
{
O
m
,
i
⃗
m
,
j
⃗
m
}
\{{{O}_{m}},{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{Om,im,jm}中的方向角,
a
a
a,
b
b
b 见公式(1.74c),
D
=
1
/
k
∗
D=1/k*
D=1/k∗。那么,在运动刚体
Σ
*
\Sigma \text{*}
Σ*运动过程中,运动刚体
Σ
*
\Sigma \text{*}
Σ*上是否存在这样的特征点,其在固定坐标系下的轨迹曲线
Γ
P
{{\Gamma }_{P}}
ΓP的相对曲率
k
p
{{k}_{p}}
kp,具有
k
p
≡
常数
{{k}_{p}}\equiv常数
kp≡常数 或
k
p
≡
0
{{k}_{p}}\equiv0
kp≡0,也就是使上式相对曲率
Γ
P
{{\Gamma }_{P}}
ΓP 恒等于常数或零,从而确定出运动刚体上的圆点和滑点。
显然,瞬时成立或更高阶导数为零在第1章已经论述,得到了瞬时连杆平面上的拐点圆、曲率驻点、Ball点、Burmester点和Ball-Burmester点等;而对于所有位置
k
p
≡
常数
{{k}_{p}}\equiv常数
kp≡常数或
k
p
≡
0
{{k}_{p}}\equiv0
kp≡0微分方程解的存在性和求解方法,目前还未见研究文献报道。
将原曲线
Γ
O
m
{{\Gamma }_{Om}}
ΓOm改为圆,即上式有了具体的代数阶次,使得方程稍微变简单点,并没有改变其微分方程的性质和求解难度。由上述S.Roberts 理论可知,由两个圆点确定的平面运动轨迹曲线是六次代数曲线,而一个圆和一条直线确定的平面运动轨迹曲线是四次代数曲线,两条直线确定的平面运动轨迹曲线是二次代数曲线。
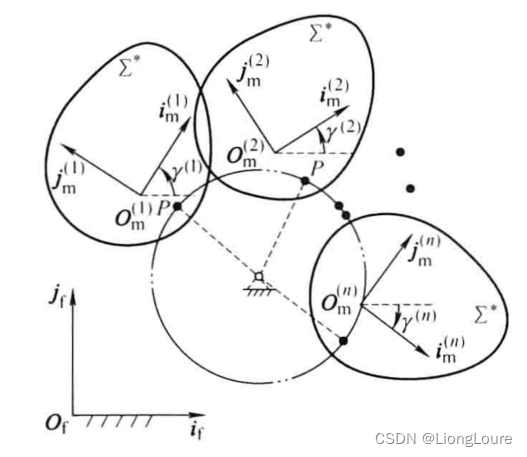
由上述连续及高阶运动综合可知,确切、完整描述刚体的运动性质并不简单,实现更难。在工程上有时仅仅要求准确通过若干离散位置,而在其他位置并无要求,这样既简化运动综合难度,又有实用价值,称为机构离散运动综合 ,包括少位置精确综合和多位置的近似综合,又统称为机构运动综合,如下图所示。 机构少位置精确综合可描述为∶ 对于给定两个构件之间相对运动有限几个位置要求,如连杆运动几个位置、连杆点轨迹上几个点、两连架杆对应函数几组值,确定连杆机构的类型与尺度。同连续运动位置综合一样,可以将少位置要求或两个构件之间的相对运动表示为运动刚体
Σ
*
\Sigma \text{*}
Σ*坐标系
{
O
m
,
i
⃗
m
,
j
⃗
m
}
\{{{O}_{m}},{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{Om,im,jm}对于固定刚体坐标系
{
O
f
,
i
⃗
f
,
j
⃗
f
}
\{{{O}_{f}},{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{Of,if,jf}的位移,只是运动坐标系
{
O
m
,
i
⃗
m
,
j
⃗
m
}
\{{{O}_{m}},{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{Om,im,jm}的原点
O
m
{{O}_{m}}
Om在固定作标系
{
O
f
,
i
⃗
f
,
j
⃗
f
}
\{{{O}_{f}},{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{Of,if,jf}中的轨迹
Γ
O
m
{{\Gamma }_{Om}}
ΓOm,是离散点集
{
R
O
m
(
i
)
}
,
i
=
1
,
.
.
,
n
\{R_{Om}^{(i)}\},i=1,..,n
{ROm(i)},i=1,..,n,并且运动坐标系的标矢
i
⃗
m
{{{\vec{i}}}_{m}}
im在固定坐标系中的方向角
γ
\gamma
γ为离散函数。此时,对于运动刚体
Σ
*
\Sigma \text{*}
Σ*上任意点
P
(
x
P
m
,
y
P
m
)
P({{x}_{Pm}},{{y}_{Pm}})
P(xPm,yPm),其在固定坐标系中的离散点集
{
R
O
m
(
i
)
}
\{R_{Om}^{(i)}\}
{ROm(i)},可由式(2.4)得到。
机构多个分离位置的近似综合可以描述为∶对于给定两个构件之间多个相对运动若干离散位置要求,如连杆的多个位置、连杆点轨迹上多个点、两连架杆多组对应函数值,确定连杆机构的类型与尺度。两个构件之间的运动同样由运动刚体
Σ
*
\Sigma \text{*}
Σ*上坐标系
{
O
m
,
i
⃗
m
,
j
⃗
m
}
\{{{O}_{m}},{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{Om,im,jm}相对于固定刚体
Σ
\Sigma
Σ坐标系
{
O
f
,
i
⃗
f
,
j
⃗
f
}
\{{{O}_{f}},{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{Of,if,jf}的位置
{
R
O
m
(
i
)
,
γ
(
i
)
}
\{R_{Om}^{(i)},{{\gamma }^{(i)}}\}
{ROm(i),γ(i)}来描述。
连杆机构的函数综合要求机构的输出连架杆和输入连架杆的位移满足给定的函数关系。连杆机构的传递函数可以表示为
φ
=
φ
(
t
)
,
δ
=
δ
(
φ
)
\varphi =\varphi (t),\delta =\delta (\varphi )
φ=φ(t),δ=δ(φ)或者
S
=
S
(
φ
)
S=S(\varphi )
S=S(φ),其中
φ
\varphi
φ为输入连架杆的转角,
δ
\delta
δ和
S
S
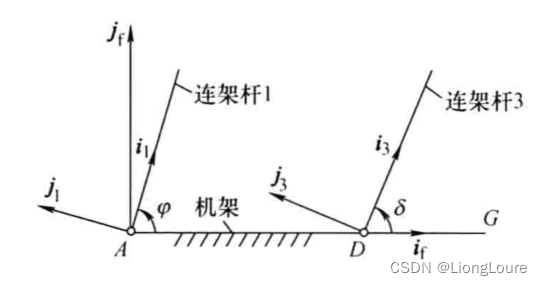
S分别为输出连架杆的角位移和线位移。输出转角由平面全铰链四杆机构和平面导杆机构实现,而输出线位移由平面滑块机构来实现。在机械原理教科书中把其中一个连架杆看作相对机架,则另一个连架杆就转化为相对连杆。
若给定两连架杆转角实现给定角位移函数
δ
=
δ
(
φ
)
\delta =\delta (\varphi )
δ=δ(φ),其中
φ
\varphi
φ为输入杆的转角,
δ
\delta
δ为输出杆的转角。如下图所示: 取机架AD的长度为单位长度,在机架
A
D
AD
AD上建立固定坐标系
{
A
;
i
⃗
f
,
j
⃗
f
}
\{A;{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{A;if,jf}在连架杆
1
1
1以及连架杆
3
3
3上分别建立运动坐标系
{
A
;
i
⃗
1
,
j
⃗
1
}
\{A;{{{\vec{i}}}_{1}},{{{\vec{j}}}_{1}}\}
{A;i1,j1}和
{
D
;
i
⃗
3
,
j
⃗
3
}
\{D;{{{\vec{i}}}_{3}},{{{\vec{j}}}_{3}}\}
{D;i3,j3},连架杆
3
3
3相对于连架杆
1
1
1的运动可描述为随着铰链点
D
D
D的平移及绕点
D
D
D的转动,转角
γ
=
δ
−
φ
\gamma =\delta -\varphi
γ=δ−φ,从而可以按照式(2.46)的形式描述连架杆
3
3
3相对于连架杆
1
1
1的运动为∶
R
⃗
D
=
cos
φ
i
⃗
1
−
sin
φ
j
⃗
1
,
γ
=
δ
−
φ
{{{\vec{R}}}_{D}}=\cos \varphi {{{\vec{i}}}_{1}}-\sin \varphi {{{\vec{j}}}_{1}},\gamma =\delta -\varphi
RD=cosφi1−sinφj1,γ=δ−φ
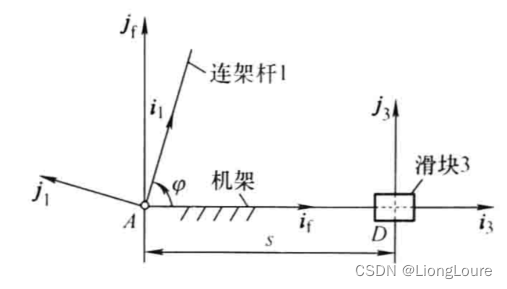
若给定的传递函数关系为
S
=
S
(
φ
)
S=S(\varphi )
S=S(φ),其中
φ
\varphi
φ为输入杆的转角,
S
S
S为滑块的位移,如下图所示。
同样地,在机架
A
D
AD
AD上建立固定坐标系
{
A
;
i
⃗
f
,
j
⃗
f
}
\{A;{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{A;if,jf},在连架杆
1
1
1和滑块
3
3
3上分别建立运动坐标系
{
A
;
i
⃗
1
,
j
⃗
1
}
\{A;{{{\vec{i}}}_{1}},{{{\vec{j}}}_{1}}\}
{A;i1,j1}以及
{
D
;
i
⃗
3
,
j
⃗
3
}
\{D;{{{\vec{i}}}_{3}},{{{\vec{j}}}_{3}}\}
{D;i3,j3},则滑块
3
3
3相对于连架杆
1
1
1的运动可描述为∶
R
⃗
D
=
S
cos
φ
i
⃗
1
−
S
sin
φ
j
⃗
1
,
γ
=
−
φ
{{{\vec{R}}}_{D}}=S\cos \varphi {{{\vec{i}}}_{1}}-S\sin \varphi {{{\vec{j}}}_{1}},\gamma =-\varphi
RD=Scosφi1−Ssinφj1,γ=−φ
当给定平面机构两连架杆运动函数关系时,
R
⃗
D
=
cos
φ
i
⃗
1
−
sin
φ
j
⃗
1
,
γ
=
δ
−
φ
{{{\vec{R}}}_{D}}=\cos \varphi {{{\vec{i}}}_{1}}-\sin \varphi {{{\vec{j}}}_{1}},\gamma =\delta -\varphi
RD=cosφi1−sinφj1,γ=δ−φ描述了连架杆
3
3
3上运动坐标系原点
D
D
D在连架杆
1
1
1上坐标系中的位置
(
cos
φ
,
−
sin
φ
)
(\cos \varphi ,-\sin \varphi )
(cosφ,−sinφ)和方向角
γ
=
δ
−
φ
\gamma =\delta -\varphi
γ=δ−φ;
R
⃗
D
=
S
cos
φ
i
⃗
1
−
S
sin
φ
j
⃗
1
,
γ
=
−
φ
{{{\vec{R}}}_{D}}=S\cos \varphi {{{\vec{i}}}_{1}}-S\sin \varphi {{{\vec{j}}}_{1}},\gamma =-\varphi
RD=Scosφi1−Ssinφj1,γ=−φ描述了滑块
3
3
3的坐标系原点
D
D
D在连架杆
1
1
1上坐标系中的位置
(
S
cos
φ
,
−
S
sin
φ
)
(S\cos \varphi ,-S\sin \varphi )
(Scosφ,−Ssinφ)和方向角
γ
=
−
φ
\gamma =-\varphi
γ=−φ,均可以对应平面相伴运动的表示式(2.46)。因而将函数综合问题转化为刚体位置综合问题,即在作相对运动的另一连架杆上寻找特征点(圆点)。
2.5.1.4 轨迹综合
对于平面连杆机构的轨迹综合,要确定平面连杆机构的尺寸参数,使得连杆点能够复演给定的平面曲线
y
=
f
(
x
)
y=f(x)
y=f(x)或者点集
(
x
M
,
y
M
)
({{x}_{M}},{{y}_{M}})
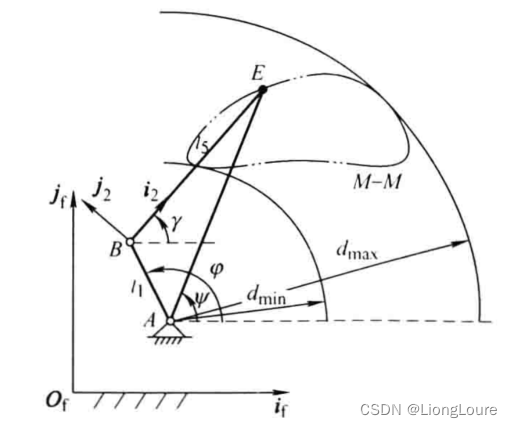
(xM,yM),如下图所示。
工程技术人员通过查找连杆曲线的图谱来确定连杆机构的尺寸,或者通过实验法来确定,而数学家则通过研究给定曲线和连杆曲线的几何性质来推导出连杆点坐标的微分方程。从上述位置综合和函数综合的内容可以看出,若是同样将给定的平面曲线映射为相对于固定机架的刚体运动——原曲线
Γ
O
m
{{\Gamma }_{Om}}
ΓOm的位置矢量和相对转角$\gamma $,则轨迹综合问题同样可以转化为位置综合问题来解决。
如下图所示,采用二杆组
A
B
E
ABE
ABE上一点
E
E
E精确复演给定曲线
M
−
M
M-M
M−M,当
E
E
E点沿给定轨迹
M
−
M
M-M
M−M运动一周时,浮动杆
B
E
BE
BE具有确定的运动,轨迹综合就是在浮动杆
B
E
BE
BE上寻找特征点(圆点和滑点),问题的关键则为浮动杆
B
E
BE
BE的运动确定与描述。第1章中研究了平面连杆机构的连杆曲线分布规律,可以为问题转化提供理论基础和初始值选择依据。