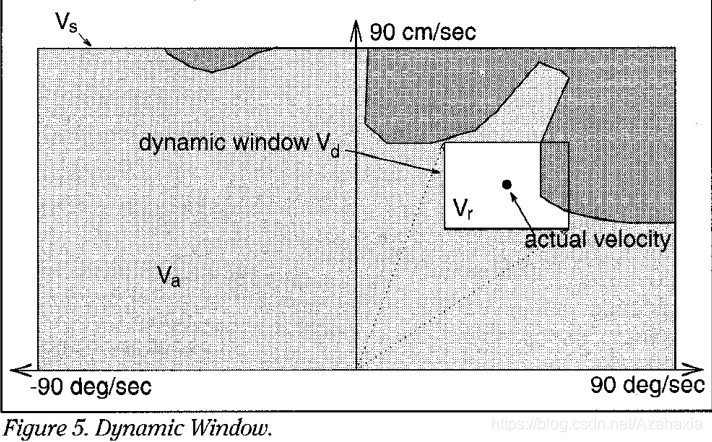
显然,机器人的速度是不可能无限增加的,所以应该考虑其最大运动速度。于是,我们可以得到如下公式:
v
s
∈
[
v
m
i
n
,
v
m
a
x
]
v_s \in [v_{min}, v_{max}]
vs∈[vmin,vmax]
ω
s
∈
[
ω
m
i
n
,
ω
m
a
x
]
\omega_s \in [\omega_{min},\omega_{max}]
ωs∈[ωmin,ωmax]
一般最小线速度取零,最小角速度和最大角速度互为相反数。但考虑到为了增加评价函数的区分度,可以考虑把最小线速度设置为1。因为当线速度为0时,评价函数就无法发挥作用。从下图的上下限可以看出,其最大速度限制设置为:
v
m
i
n
=
0
,
v
m
a
x
=
90
,
ω
m
i
n
=
−
90
,
ω
m
a
x
=
90
v_{min}=0, \; v_{max}=90, \; \omega_{min}=-90, \; \omega_{max}=90
vmin=0,vmax=90,ωmin=−90,ωmax=90
由于电机的转矩有限,因此存在一个最大的加速度限制。假设机器人当前速度为
(
v
c
,
ω
c
)
(v_c,\omega_c)
(vc,ωc),在一个有限的时间周期
Δ
t
\Delta t
Δt,机器人的速度范围应为:
v
d
∈
[
v
c
−
v
˙
a
Δ
t
,
v
c
+
v
˙
b
Δ
t
]
v_d \in [v_c-\dot{v}_a \Delta t, \;v_c+\dot{v}_b \Delta t]
vd∈[vc−v˙aΔt,vc+v˙bΔt]
ω
d
∈
[
ω
c
−
ω
˙
a
Δ
t
,
ω
c
+
ω
˙
b
Δ
t
]
\omega_d \in [\omega_c-\dot{\omega}_a \Delta t, \;\omega_c+\dot{\omega}_b \Delta t]
ωd∈[ωc−ω˙aΔt,ωc+ω˙bΔt]
上式中,
(
v
a
,
v
b
,
ω
a
,
ω
b
)
(v_a,v_b,\omega_a,\omega_b)
(va,vb,ωa,ωb)分别代表线速度最大减速度、线速度最大加速度、角速度最大减速度以及角速度最大加速度。
显然,这个安全停止速度应该与机器人与最近障碍物的距离成正比。当距离越小时,这个安全停止速度也应该相应减小。它们应该满足如下不等式:
v
a
≤
2
⋅
d
i
s
t
⋅
v
˙
a
v_a \leq \sqrt{2 \cdot dist \cdot \dot{v}_a}
va≤2⋅dist⋅v˙a
ω
a
≤
2
⋅
d
i
s
t
⋅
ω
˙
a
\omega_a \leq \sqrt{2 \cdot dist \cdot \dot{\omega}_a}
ωa≤2⋅dist⋅ω˙a
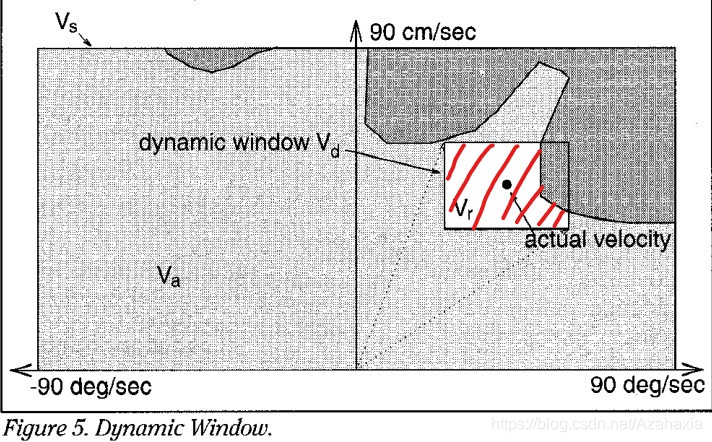
在计算三种速度限制后,我们得到了三个速度范围,它们的交集就是我们在当前状态下可以取到的速度范围,也就是上图中的红色区域。
V
r
=
V
s
⋂
V
d
⋂
V
a
V_r=V_s \bigcap V_d \bigcap V_a
Vr=Vs⋂Vd⋂Va
2.速度空间评价
在得到速度空间后,根据评价函数,我们就通过遍历每一组速度
(
v
i
,
ω
i
)
(v_i,\omega_i)
(vi,ωi)对其做出评价,然后得到一组当前最优速度
(
v
b
e
s
t
,
ω
b
e
s
t
)
(v_{best},\omega_{best})
(vbest,ωbest)。由于在计算机中处理数据是离散的,因此需要设置速度增量,即
Δ
v
=
0.01
m
/
s
,
Δ
ω
=
1
∘
/
s
\Delta v=0.01\;m/s, \;\Delta{\omega}=1^{\circ}/s
Δv=0.01m/s,Δω=1∘/s 假设计算得到的速度空间为
v
∈
[
0
,
3
]
,
ω
∈
[
−
2
0
∘
,
2
0
∘
]
v \in [0, 3],\;\omega \in [-20^{\circ},20^{\circ}]
v∈[0,3],ω∈[−20∘,20∘] 根据设置的速度增量,我们可以得到如下速度序列
the list of v
:
[
0
,
0.01
,
.
.
.
,
3.00
]
,
n
=
101
\text{the list of v}:[0,0.01,...,3.00], \; n=101
the list of v:[0,0.01,...,3.00],n=101
the list of
ω
:
[
−
2
0
∘
,
−
1
9
∘
,
.
.
.
,
2
0
∘
]
,
n
=
41
\text{the list of}\;\;\omega:[-20^{\circ},-19^{\circ},...,20^{\circ}], \; n=41
the list ofω:[−20∘,−19∘,...,20∘],n=41
经过上述计算后,我们可以得到
101
×
41
101 \times 41
101×41组速度。
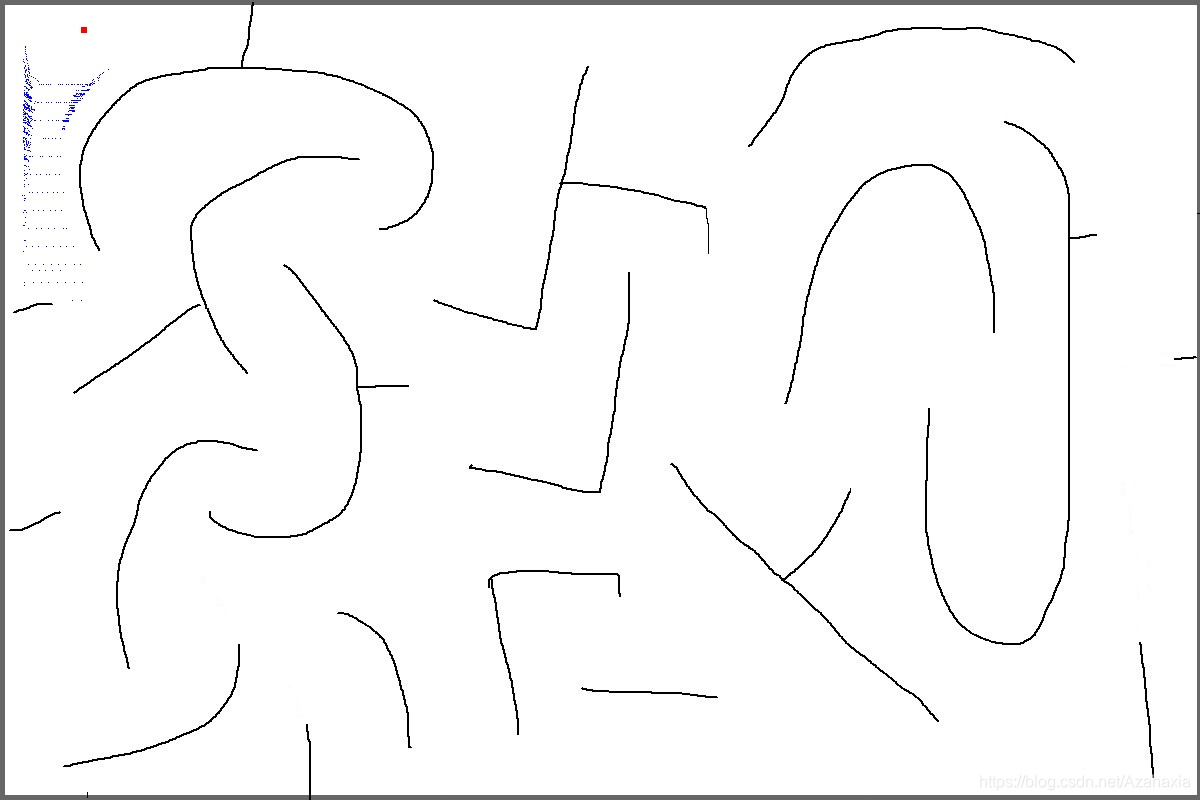
在得到每组速度后,我们还需要做一些预备工作,即对每组速度生成在给定时间周期内的轨迹预测。
2.1.轨迹预测
假设有一组速度为
(
v
i
,
ω
i
)
(v_i,\omega_i)
(vi,ωi),预测时间周期为
t
t
t,我们需要计算出在该周期内的机器人运动轨迹。与上相同,我们需要先设置一个时间增量
Δ
t
\Delta t
Δt,这样我们就有了一个时间序列
[
0
,
Δ
t
,
2
Δ
t
,
.
.
.
,
t
]
[0,\Delta t,2\Delta t,...,t]
[0,Δt,2Δt,...,t]。
假设机器人当前位姿为
(
x
0
,
y
0
,
θ
0
)
(x_0,y_0,\theta_0)
(x0,y0,θ0),根据下述递推公式就可以得到预测的轨迹点。但要说明的一点是,此处的轨迹预测公式是假设机器人是直线运动的,这是一种近似的运动模型。当距离很小时,我们可以用直线去近似弧线。
除了上述预测公式外,还有更精确的轨迹公式。事实上,当线速度和角速度不变时,机器人的运动轨迹应该是一个半径为
∣
v
ω
∣
|\frac{v}{\omega}|
∣ωv∣的圆。这也是DWA论文中采用的运动模型。该预测公式如下:
[
x
′
y
′
θ
′
]
=
[
x
−
v
ω
sin
θ
+
v
ω
sin
(
θ
+
ω
Δ
t
)
y
+
v
ω
cos
θ
−
v
ω
cos
(
θ
+
ω
Δ
t
)
θ
+
ω
Δ
t
]
(
ω
≠
0
)
\left[ \begin{matrix} x'\\ y'\\ \theta' \end{matrix} \right]= \left[ \begin{matrix} x-\frac{v}{\omega}\sin\theta+\frac{v}{\omega}\sin(\theta+\omega \Delta t)\\ y+\frac{v}{\omega}\cos\theta-\frac{v}{\omega}\cos(\theta+\omega \Delta t)\\ \theta+\omega \Delta t \end{matrix} \right] \; (\omega \neq0)
⎣⎡x′y′θ′⎦⎤=⎣⎡x−ωvsinθ+ωvsin(θ+ωΔt)y+ωvcosθ−ωvcos(θ+ωΔt)θ+ωΔt⎦⎤(ω=0) 上述公式成立的条件是角速度不为零。当角速度为零时,公式与第一个预测公式相同。
另外需要注意的是,在整个预测的时间周期
(
t
1
,
t
n
)
(t_1,t_n)
(t1,tn),我们默认机器人的速度不变。但在计算安全停止速度时,预测的轨迹点的线速度应该是减少的。
G
(
v
i
,
ω
i
)
=
σ
(
α
⋅
h
e
a
d
i
n
g
(
v
i
,
ω
i
)
+
β
⋅
d
i
s
t
(
v
i
,
ω
i
)
+
γ
⋅
v
e
l
o
c
i
t
y
(
v
i
,
ω
i
)
)
G(v_i,\omega_i)=\sigma(\alpha \cdot heading(v_i,\omega_i)+\beta \cdot dist(v_i,\omega_i)+\gamma \cdot velocity(v_i,\omega_i))
G(vi,ωi)=σ(α⋅heading(vi,ωi)+β⋅dist(vi,ωi)+γ⋅velocity(vi,ωi))
2.2.1.方向角评价
h
e
a
d
i
n
g
(
v
i
,
ω
i
)
heading(v_i,\omega_i)
heading(vi,ωi)用于评价机器人在给定角速度下运动的角度与目标角度之间的差值。显然,根据函数描述,该函数值越小,方向角评价应该越高。
h
e
a
d
i
n
g
(
v
i
,
ω
i
)
=
18
0
∘
−
∣
t
a
r
g
e
t
−
c
u
r
θ
∣
heading(v_i,\omega_i)=180^{\circ}-|target-cur\theta|
heading(vi,ωi)=180∘−∣target−curθ∣
2.2.2.障碍物距离评价
d
i
s
t
(
v
i
,
ω
i
)
dist(v_i,\omega_i)
dist(vi,ωi)用于表示机器人当前位置与最近的障碍物之间的距离。如果轨迹上无障碍物,则设定一个常数。根据函数描述可以得知,当机器人与障碍物的距离越大,则该函数评价应该越高。因此,该函数可以直接用距离作为评价函数。
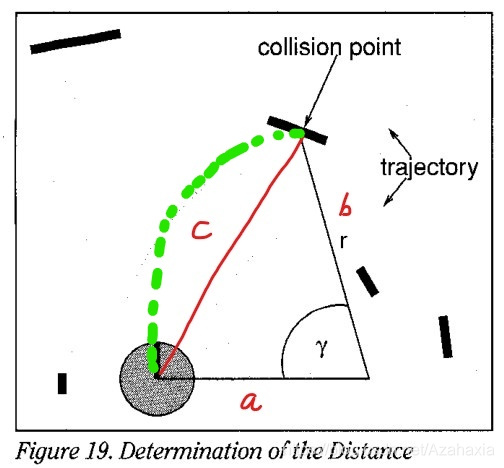
另外值得注意的是,在计算距离时还应该考虑机器人的半径。
当角速度不为零时,我们应该计算的距离是弧线长度,而不是长度
c
c
c。这个弧长的计算也比较简单,根据运动模型,我们知道:当角速度和线速度不变时,机器人的运动轨迹为一个标准的圆形。该圆的半径为(角速度单位为弧度每秒):
r
=
∣
v
ω
∣
(
ω
≠
0
)
r=|\frac{v}{\omega}| \; (\omega \neq 0)
r=∣ωv∣(ω=0) 设机器人当前的位姿为
(
x
,
y
,
θ
)
(x,y,\theta)
(x,y,θ)(这里并不是预测点的位姿),则该圆的圆心坐标为:
x
c
=
x
−
v
ω
sin
θ
y
c
=
y
+
v
ω
cos
θ
\begin{aligned} x_c = x - \frac{v}{\omega}\sin\theta \\ y_c = y + \frac{v}{\omega}\cos\theta \end{aligned}
xc=x−ωvsinθyc=y+ωvcosθ 然后通过余弦公式可以计算出角度
γ
\gamma
γ,最后应用弧长公式就可以得到弧长:
s
=
r
⋅
γ
s=r \cdot \gamma
s=r⋅γ
v
e
l
o
c
i
t
y
(
v
i
,
ω
i
)
velocity(v_i,\omega_i)
velocity(vi,ωi)表示当前的机器人速度。对于路径规划而言,显然速度越快越好,因此可直接把当前线速度作为速度评价值,即
v
e
l
o
c
i
t
y
(
v
i
,
ω
i
)
=
∣
v
i
∣
velocity(v_i,\omega_i)=|v_i|
velocity(vi,ωi)=∣vi∣ 在计算三种评价函数后,还需要分别做归一化处理。最后代入上述给出的评价函数,就可以对速度
(
v
i
,
ω
i
)
(v_i,\omega_i)
(vi,ωi)做出评价。