无人机控制输入、PID控制
最近思路比较乱,看到很多东西,因为有各种控制,需要在这里记录总结
控制输入
结合以下两个链接理解虚拟控制输入U1 U2 U3 U4
1、https://blog.csdn.net/GWH_98/article/details/86811091?utm_medium=distribute.pc_relevant.none-task-blog-baidujs_title-3&spm=1001.2101.3001.4242
2、https://zhuanlan.zhihu.com/p/106492555
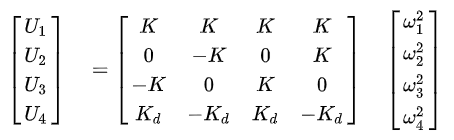
如链接2中所说,说白了,无人机四个控制输入只有桨叶的转速,伪控制量U1-U4实际是几个通道的转速经过pid之后的输出值pidout,高度通道的输出可以看做是总拉力,姿态通道可以看成是力矩(具体分析就涉及到pid控制器的设计了);其实际控制量(输入量)可以看成是电机转速的平方。
pid设计不同,转速与虚拟控制输入就不同
链接1给出的虚拟控制输入如下:
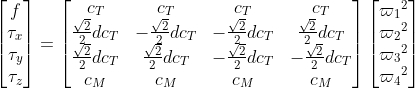
链接2给出的虚拟控制输入如下:
pid控制
1、前面可以看出来pid控制不同会带来很不同的控制输入,那么如何设计pid控制器呢?入手需要考虑哪些呢?
https://mp.weixin.qq.com/s?__biz=MzUzNTkzMjI5Mw==&mid=2247484121&idx=1&sn=673b7ff89b87451fa0e50b157fcb69e0&chksm=fafcbe33cd8b3725b1f04a92fe0d1be182aeb8069928df04069f47e3856577d3da32bcda52ca&scene=21#wechat_redirect
单凭文章里提到的下面几点就值得收藏,需要思考如何设计PID控制器

2、知乎作者关于飞控和滤波器的关系解释很清楚,链接如下
https://zhuanlan.zhihu.com/p/34323865
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)