@(PID)
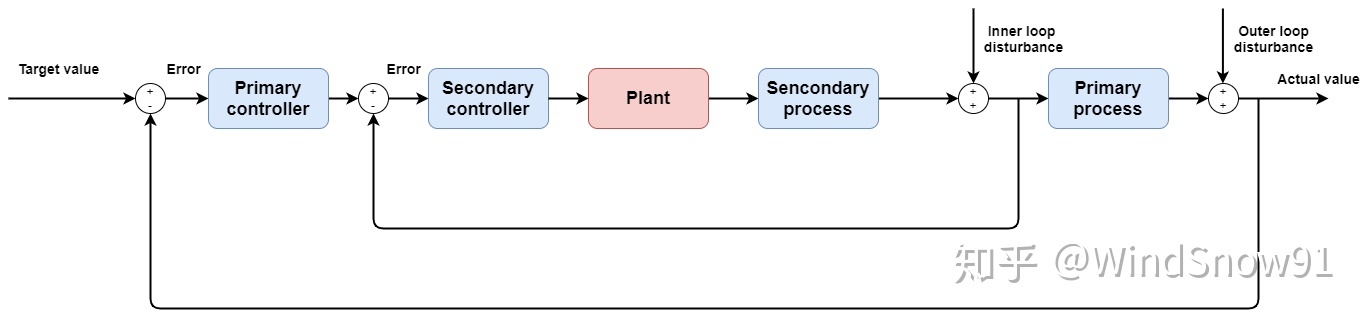
串级控制包含了主控制器和从控制器两个独立的部分,其中从控制器的控制变量是由主控制器回路得到的,主控制决定了次控制回路的设定值。即从控制器的设定值是主控制器的的输出值,主控制器的设定值是整个系统的目标值。