P600—准行业无人机研发平台
Prometheus 600(P600)是阿木实验室推出的一款准行业级无人机研发平台,适用于无人机行业应用开发与室外环境下的无人机算法验证。

P600可轻易地搭载云台吊舱、激光雷达与图数传一体组网链路等挂载设备,实现基于视觉的目标识别、框选追踪、激光雷达避障、室外指点飞行等功能,和超视距多机组网+图数传通信的能力;相关功能的Demo与源代码均发布在Prometheus开源项目中。
产品特色
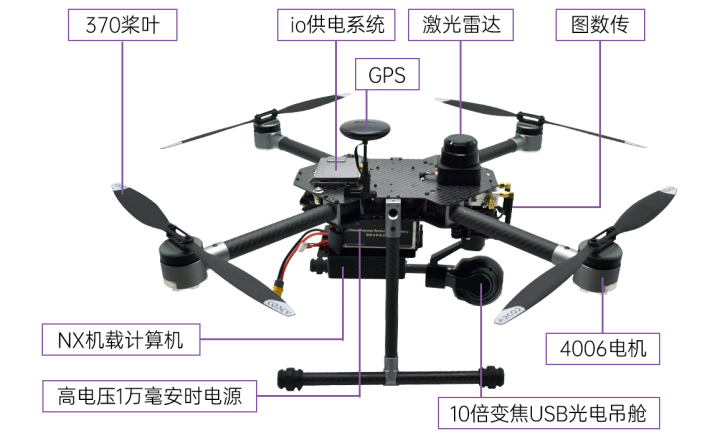
P600机架中内置了基于Pixhawk V5深度优化的飞控核心,将接口集成到了机架顶板上的中置接口拓展坞中,更加符合开发者的使用习惯。
作为Prometheus的第二代行业应用平台,P600的官方版本除运行Prometheus系统的Nvidia NX机载计算机外,可选配10倍变焦光电吊舱、激光雷达与图数传一体组网链路。搭载相应设备的型号可直接在无人机上复现Prometheus中的KCF框选追踪、A*全局规划、激光雷达SLAM和YOLO通用目标识别等算法。
P600采用了全机身内走线+内置飞控的设计,留给开发者的是上中下总计三层拓展空间。结合无人机机身最上层的飞控拓展接口与最下层的板载计算机,可自由地加装适配PX4飞控或ROS的传感器。是行业应用无人机研发的理想平台和验证用机。
Prometheus平台
P600搭载了开源无人机机载系统Prometheus V1.0-stable。在收集P450平台的测试数据后,Prometheus系统得到了进一步优化。
关于Prometheus项目:
Prometheus是一套开源的自主无人机软件平台,为无人机的智能与自主飞行提供全套解决方案。本项目集成了PX4开源飞控固件与ROS开发环境,可为开发者提供成熟可用的机载电脑端开发程序,实现更加简洁快速的开发体验。目前已集成建图、定位、规划、控制及目标检测等模块,并配套有Gazebo仿真测试代码。

P600在使用场景上更偏向于行业应用领域,因此在机载系统上也与偏向科研的P450有所不同。P600的Prometheus系统除了主要的四大模块:PX4飞控控制、SLAM建图、任务及路径规划与视觉识别以外,还额外添加了为专用光电吊舱适配的智能吊舱控制模块。
P600软件主要功能
智能吊舱控制

KCF框选追踪
在行业应用无人机中,各种配置的云台吊舱一直是使用率最高的挂载设备。P600无人机在立项之初就围绕智能吊舱进行设计。阿木实验室为P600配置USB接口的Q10F十倍变焦单光吊舱,并开发了其专用ROS驱动,可在机载计算机中获取吊舱的实时图像。更进一步的,P600可通过机载系统中内置的KCF框选追踪算法,基于图像视觉实现对特定目标(人/车/其他无人机等…)的识别、追踪与跟随。甚至可以通过对视觉中目标框的大小变化,解算出自机与追踪目标之间的大致距离;使P600除了跟随目标外,也可在目标接近时调整自身位置,始终与目标之间保持固定的距离。在智能吊舱追踪目标的过程中,吊舱和无人机均通过ROS实现了完全自主控制。
在手动控制模式下,也可在无人机飞行、悬停和执行已规划的航迹任务中,通过ROS中的控制程序自由地调整吊舱的朝向与焦距,实现高自由度的无人机自动巡检任务。除追踪算法外,P600同样可通过吊舱实现Prometheus系统中视觉识别模块的所有功能,包括数字识别,椭圆检测,多二维码检测,颜色识别,YOLO通用目标检测等;并会在后续更新中,加入基于吊舱的二维码精准降落等功能。
激光雷达避障建图
A*全局规划
在加装激光雷达后,P600即使在室外复杂环境下,也可通过A*全局规划算法实现对障碍物的实时避障。此外,P600同样可以基于激光雷达使用Prometheus中任务规划模块的APF局部规划,VFH局部规划和SLAM模块下的Cartographer建图等功能。
MAVROS控制接口

飞行控制
对飞机进行二次开发,利用mavros可通过简单的控制指令,实现无人机的一键解锁,起飞,悬停,降落,紧急上锁,惯性系及机体系下的控制指令(位置控制,速度控制或者组合控制)以及轨迹跟踪等功能。
远距离图数传+多机组网
通过加装阿木实验室的组网专用链路:Homer高带宽图数传一体模块,P600可在最大2.5km的通信距离内实现基于ROS的多机组网通信,并在该通信范围内通过阿木实验室的开发的QGC地面站实现一控多机、视野共享以及基于网口的多机视频推流。

一控多机定制QGC地面站
在基于ROS的组网网络中,每台无人机和地面站,两者之间都可以通过ROS节点实现数据互通。基于这套组网系统,可以实现每台无人机之间的数据交换,进而开展多无人机协同追踪搜捕与多角度目标定位等前沿研究方向的研发。
P600的开源硬件资料
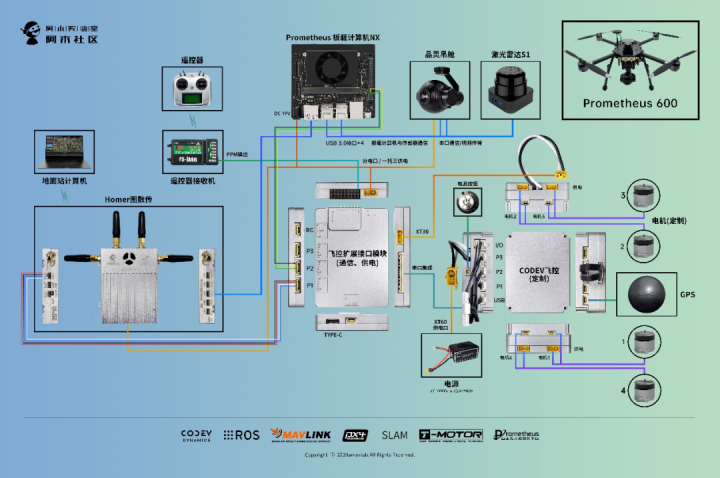
P600拥有深度优化后的飞控单元与高度集成的拓展I/O接口,加上作为机载计算机的Nvidia Jetson Xavier NX开发套件,可拓展几乎所有的PX4/智能机器人外部传感器。得益于P600丰富的电路原理图与引脚定义表等硬件资料,开发者甚至可以为其开发P600专用的挂载设备,或将自行设计的产品接入到P600系统中,彻底摆脱市面上通用组件的研发桎梏。
硬件开源链接:
https://github.com/CodevDynamics/Opensource_Hardware

P600的定制飞控与IO拓展模块

P600的定制飞控与IO拓展模块
除上述功能以外,P600将保持机载系统Prometheus V1.0-stable持续的免费更新,在未来支持更多Prometheus项目中的功能,并提供更多官方支持的挂载设备。
技术参数

飞行器类型:四旋翼
飞控核心:CODEV飞控(基于Pixhawk V5深度优化)
机载计算机:Nvidia Jetson Xavier NX
机载系统:Prometheus V1.0-stable
重量(约):2.2kg(不含电池,含负载),3.2kg(含电池,含负载)
尺寸:335mm*335mm*230mm(长*宽*高)
对角线轴距:600mm
动力系统:6S FOC调速器+4006电机+370mm桨叶
最大有效载荷:0.8kg(高配)
最大起飞重量:4kg
最长飞行时间:约36min(高配,4m飞行高度、室外19度、使用电压20v-26.1v)
悬停精度:垂直0.5m 水平 1.5m
抗风等级:4-5级
工作环境:室外
工作温度:6℃-40℃
遥控器:富斯FS-i6S
电池:6S-10000mAh锂聚合物电池 20V-26.1V
可选装传感器:
云台吊舱 十倍变焦单光吊舱
激光雷达 (室外40m)
组网链路 阿木实验室Homer图数传组网模块
RTK单元 飞纳经纬MINI2-D
……第三方云台/全相视觉避障/RTK等
配套资料
P600拥有Github项目、产品Wiki及官方使用说明的技术支持。此外,P600还提供与真机功能相对应的ROS仿真教程。通过阿木实验室提供的仿真镜像“amovlab-prometheus-v1.iso”,用户可通过在电脑上安装镜像的方式,直接解决在配置仿真环境的过程中遇到的种种问题,快速上手开发工作。同时,P600无人机也可与阿木实验室的相关课程配套使用,帮助无人机开发者度过从原理入门到独立开发的学习过程。阿木实验室的每月月底也会举办P系列无人机的线下培训,购买P600无人机的用户可免费参加。
Prometheus自主无人机开源项目:
https://github.com/amov-lab/Prometheus
P600 官方WiKi:
https://www.amovlab.com/document
P600视频使用教程:
https://www.bilibili.com/video/BV17V411j7Em
铂贝学院:
https://bbs.amovlab.com/plugin.php?id=zhanmishu_video:video
Prometheus自主无人机二次开发课程:
https://bbs.amovlab.com/plugin.php?id=zhanmishu_video:video&mod=video&cid=43
售后及服务
P600享有阿木实验室的官方售后服务。购买P600的用户除自主获取的资料外,还可参与到阿木社区与Prometheus官方交流群的讨论中。获取技术资深团队的最新研发动态,专业技术团队的最权威答疑;更进一步地,为开源精神做出贡献。
阿木社区:
https://bbs.amovlab.com/
阿木实验室官方公众号:
https://www.amovlab.com/
欢迎洽谈合作~
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)