1. 搜索官方仓库镜像:docker search image_name( 镜像名 )
例如:
docker search nginx
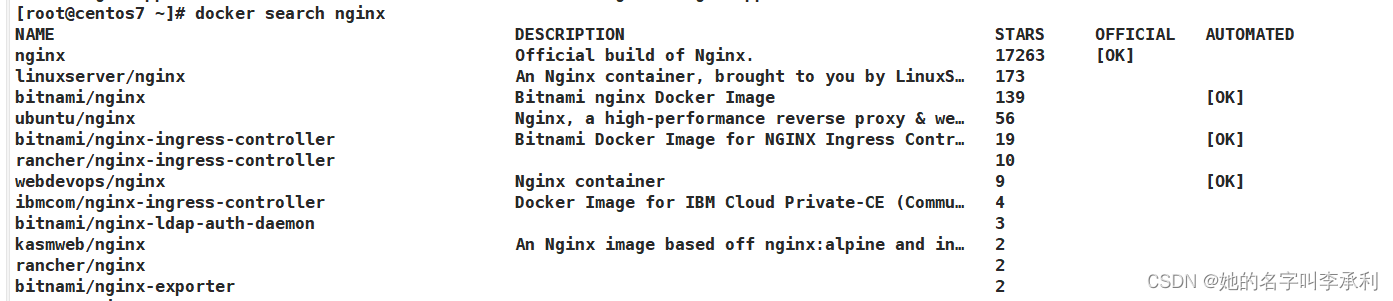
命令执行结果参数说明:
|
参数
|
说明
|
|
NAME
|
镜像名称
|
|
DESCRIPTION
|
镜像说明
|
|
STARS
|
点赞数量
|
|
OFFICIAL
|
是否是
docker
官方发布的
|
|
AUTOMATED
|
是否是自动构建的
|
2. 拉取镜像:docker pull image_name( 镜像名:镜像版本,默认是最新版 )
例如:
docker pull nginx:1.14-alpine

3. 查看当前主机镜像列表:docker images / docker image ls
例如:
docker images / docker image ls

4. 导出镜像: docker image save
例如:
docker image save image_name > filename
docker image save -o filename image_name1 [ image_name2 . . . ]
· -o:指定导出镜像的位置;
· 可以同时导出多个镜像;为一个文件;
· 指定.tar.gz 可以导出并压缩。

注意:使用第一种方式导出镜像时,若不写" image ",则会将指定的镜像并且拉取下来的镜像版本全部导出。
5. 删除镜像:docker image rm / docker rmi
例如:
docker image rm image_name
docker rmi image_name

6. 导入镜像: docker image load
例如:
docker image load -i filename
" -i "表示指定要导入的镜像文件
" -q "表示静默模式导入镜像,不显示导入的过程

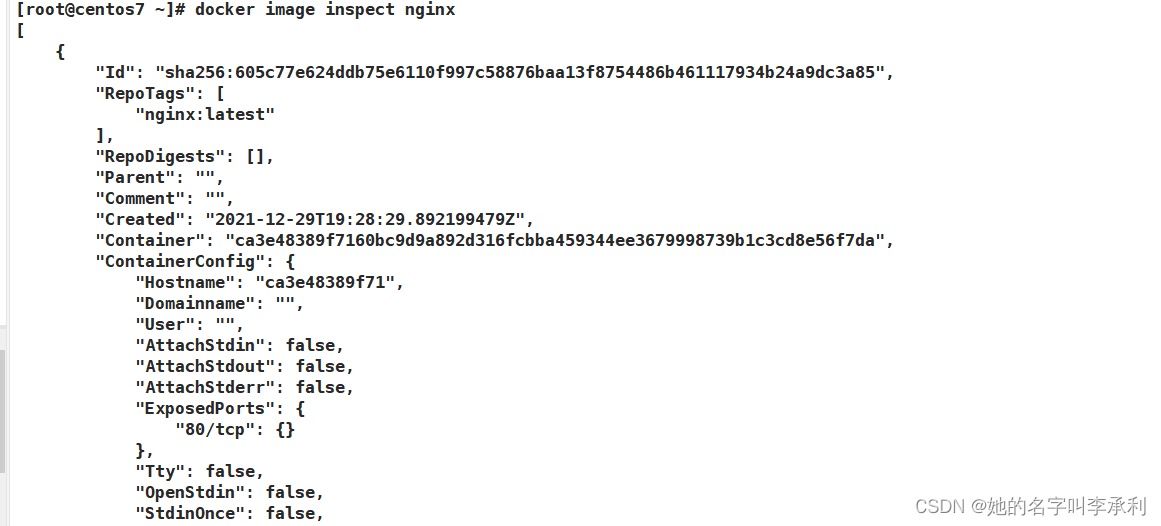
7. 查看镜像的详细信息:docker image inspect
例如:
docker image inspect image_name
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)