kalibr官方源码GitHub - ethz-asl/kalibr: The Kalibr visual-inertial calibration toolbox
鼠标下拉找到install follow the install wiki page instructions
点击后进入官网安装界面
Installation · ethz-asl/kalibr Wiki · GitHub
如果你安装了ROS1就不用去安装Docker容器,下列的2,3直接跳过
接下去没安装ROS(我们通常说的ROS是ROS1,ROS2是新出的,暂时不用)就安装ROS及配置文件,以前安装ROS了也要注意依赖的更新,特别是python的,可以把下述命令执行一下

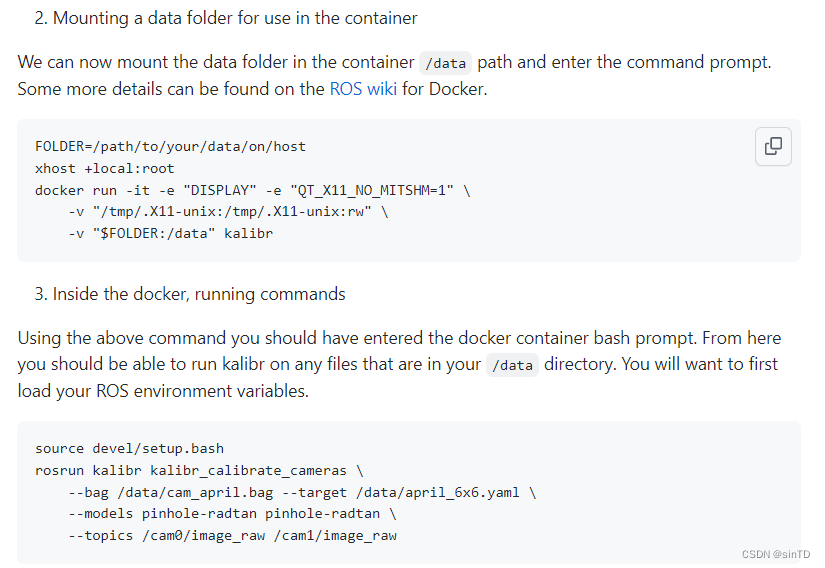
接下去按3,4,5的步骤进行配置,
配置完成后参考官方pdf进行标定操作

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)