欢迎交流~ 个人 Gitter 交流平台,点击直达:
本说明针对 Firmware v1.5.4
1. 添加流程说明
( 1 ) 在Firmware/msg下新建uORB的成员变量,eg: xxx.msg
( 2 ) 在Firmware/msg/CMakeLists.txt中添加话题的xxx.msg ,作为cmake的编译索引。
2. 添加话题示例
( 1 ) 这里,在Firmware/msg下新建fantasy.msg。内容为:
uint64 hehe1
uint64 hehe2
uint64 hehe3
uint64 hehe4
# TOPICS fantasy huihui jxf
关于数据类型的定义这里有两点需要说明:
① 数据的类型是unit8/16/32/64(不是uint8_t)、bool、float32、float32[n](n为数组元素个数)。uint8在生成的头文件中表示为uint8_t,float32在生成的头文件中表示为float。
② 数据不需要用分号“;”隔开,换行即可
( 2 ) Firmware/msg中的CMakeLists.txt中添加:fantasy.msg
注意:
# TOPICS # 号和TOPICS中间有一个空格。
一个消息定义就可以用于多个独立的主题。
3. 原理说明
xxx.msg为成员;
# TOPICS为话题的定义;
在编译的时候,通过genmsg_cpp自动生成一定结构的代码,再通过CMakeLists.txt进行编译,所以在编译一遍后,才能具体看到所定义的话题成员。
上面的fantasy.msg编译后生成的 /uORB/topics/fantasy.h文件主要内容如下:
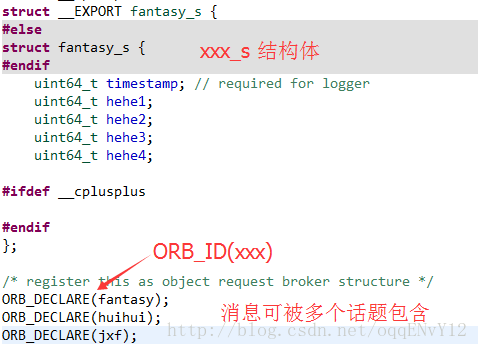
注意:
每一个生成的C/C++结构体中,会多出一个uint64_t timestamp 字段。这个变量作为话题运行的时间戳,用于将消息记录到日志当中。
常有人说uORB文件夹下没有topics文件夹。确实Firmware/src/modules/uORB目录下是没有topics文件夹的。但是如果是FMUv2或FMUv3系列的飞控板,关注的是编译得到的目录
对于Windows用户,Firmware/build_px4fmu-v2_default,这里面有你需要的东西。
对于Ubuntu用户,在终端进行编译的话请查看~/src/Firmware/build_px4fmu-v2_default,使用Qt进行编译的请查看~/src/Firmware-Build。
以上都是影子构建的表现。
4. 相关函数说明
主要是关于uORB函数的简单介绍,详细说明请点击传送门。
orb_advert_t orb_advertise(const struct orb_metadata *meta, const void *data)
int orb_publish(const struct orb_metadata *meta, orb_advert_t handle, const void *data)
int orb_subscribe(const struct orb_metadata *meta)
int orb_copy(const struct orb_metadata *meta, int handle, void *buffer)
参数说明:
orb_advert_t :空指针 handle
const struct orb_metadata *meta :话题ID
const void *data :相关数据类型指针
话题之间的发布订阅依赖于handle进行相关性的传递,话题的ID和结构通过# TOPICS fantasy来定义;
注意:在公告和发布时用的是handle指针,订阅和复制用的是整形。
5. 发布订阅示例
示例在 px4_simple_app.c上进行测试
#include <px4_config.h>
#include <px4_tasks.h>
#include <px4_posix.h>
#include <unistd.h>
#include <stdio.h>
#include <poll.h>
#include <string.h>
#include <math.h>
#include <uORB/uORB.h>
#include <uORB/topics/sensor_combined.h>
#include <uORB/topics/vehicle_attitude.h>
#include <uORB/topics/fantasy.h>
__EXPORT int px4_simple_app_main(int argc, char *argv[]);
int px4_simple_app_main(int argc, char *argv[])
{
PX4_INFO("Hello Fantasy!");
struct fantasy_s test;
memset(&test, 0, sizeof(test));
orb_advert_t test_pub = orb_advertise(ORB_ID(fantasy), &test);
test.hehe1 = 2;
test.hehe2 = 3;
test.hehe3 = 3;
orb_publish(ORB_ID(fantasy), test_pub, &test);
int test_sub_fd = orb_subscribe(ORB_ID(fantasy));
struct fantasy_s data_copy;
orb_copy(ORB_ID(fantasy), test_sub_fd, &data_copy);
PX4_WARN("[px4_simple_app] GanTA:\t%8.4f\t%8.4f\t%8.4f",
(double)data_copy.hehe1,
(double)data_copy.hehe2,
(double)data_copy.hehe3);
return 0;
}
测试效果:

参考:
① 官网进程间通信开发指南
② 基于Firmware 1.2.0的uORB主题添加
③ PX4中文维基 - uORB消息机制
④ PX4中文维基 - 编写应用程序
最后赠送一个可能解决Eclipse环境下代码中到处都是奇怪警告、错误的方法
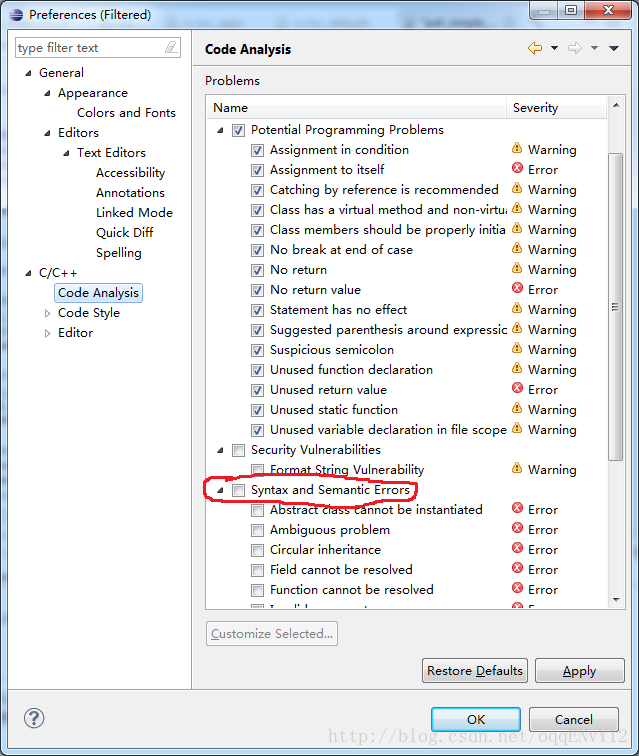
我反正是把这一栏取消勾选了,上面一栏可以留下的,代码问题分析。
By Fantasy
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)