欢迎交流~ 个人 Gitter 交流平台,点击直达:
敬启者:
打算进行PX4官网的汉化工作。
- GitBook
与官网的方式相同,我们也是将网站以GitBook的方式呈现给大家。
汉化后的版本先点点点点这个地方预览一下呗。
Gitbook是一个命令行工具,可以把你的Markdown文件汇集成电子书,并提供PDF等多种格式输出。你可以把Gitbook生成的HTML发布出来,就形成了一个简单的静态网站,就像现在你所看到的。
用CSDN博客的相信大家都不会陌生Markdown这个工具。
不多说,点进来你就知道怎么使用了。
- Github
这里我已经将GitBook托管到了Github上,大家感兴趣的可以fork下来一起完成这项工程谈不上浩大的工作,我想你也常常为打开官网望去满眼的英文而苦恼吧,来吧,我们可以做点什么的。汉化版Github上的fork地址在这里.PX4官网的fork仓库大家也可以在这里看到。
- Git
Git这个工具非常重要,且简单易学有意思,不妨掌握一下,技多不压身。关于Git的学习点我们的擎天柱luoshi006,还有不得不说廖雪峰的官方网站也是极好的。
参与维护
网页端编辑(推荐方法:非常简单,只需三步就可以完成你的贡献)
找到入口:直接打开github中网页端进入要进行编辑的文件,如下图

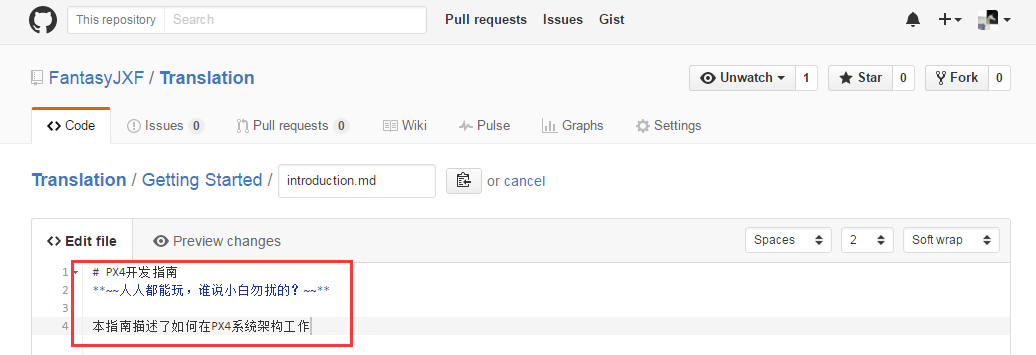
开始编辑:进入编辑页面后,对文件进行修改,会出现如下图问题

按照提示,点击Fork this repository and propose chanes,进入即可编辑,如下图
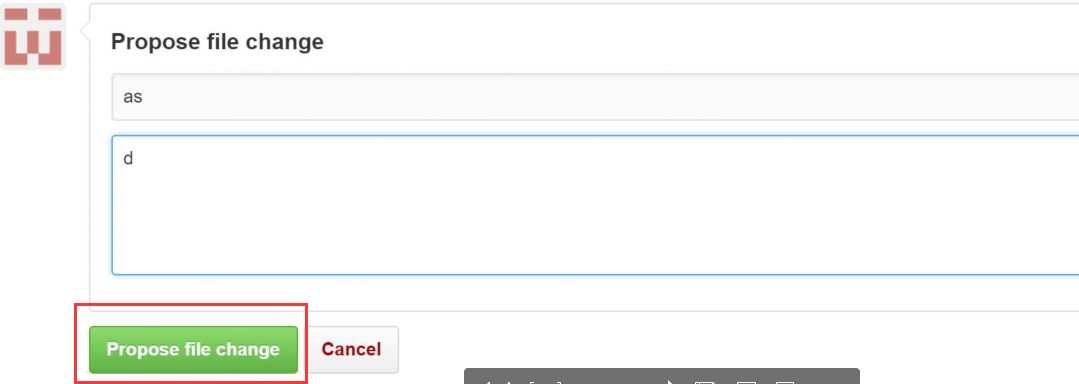
提交贡献:首先提名文件更改,如下图
检查是否与原有版本有冲突,如果有,解决冲突再提交,没有则提交,如下图
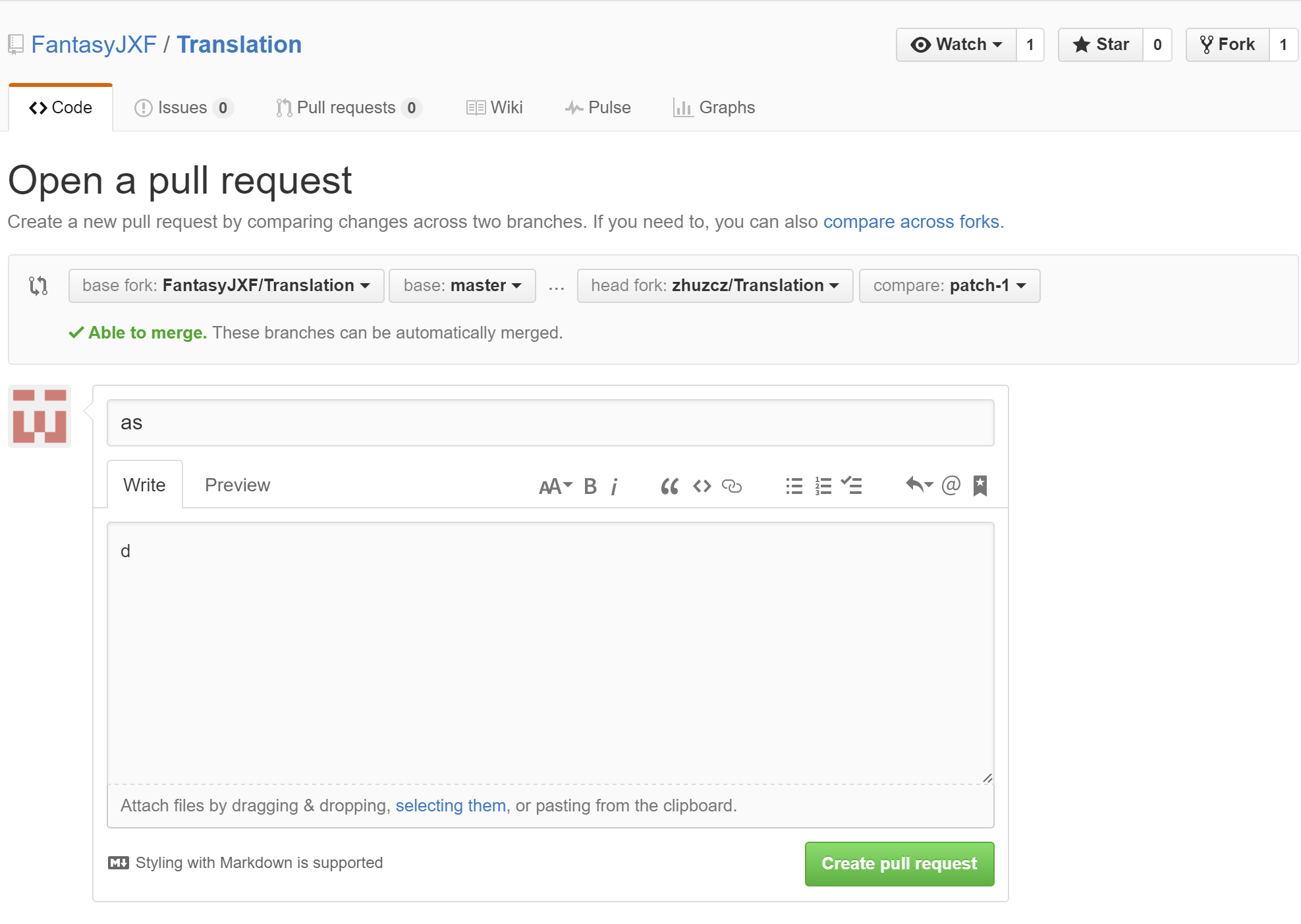
剩下来就是版主的事了,如果没有太大的问题,版主就可以合并分支了,到这你的对本文档的贡献就完成了。
本地编辑(git高级用户推荐)
相对于网页端编辑,本地编辑只是编辑在本地,后期的提交分支还是得在网页端进行,不过在此之前你得fork本项目到你的仓库。

然后进行如下操作
#下载你的项目到本地
git clone https:
#进入文件夹进行编辑即可,完成后如下操作
git add .
#这里可以看到你的更改状况
git status
#添加你的更改备注,让别人知道你干了什么
git commit -m "your comment"
#提交更改
git pull https:
#检查是否与nephen云端产生冲突,如果有,解决冲突后重新git commit -m "your comment"
git push origin master
#推送到个人云端
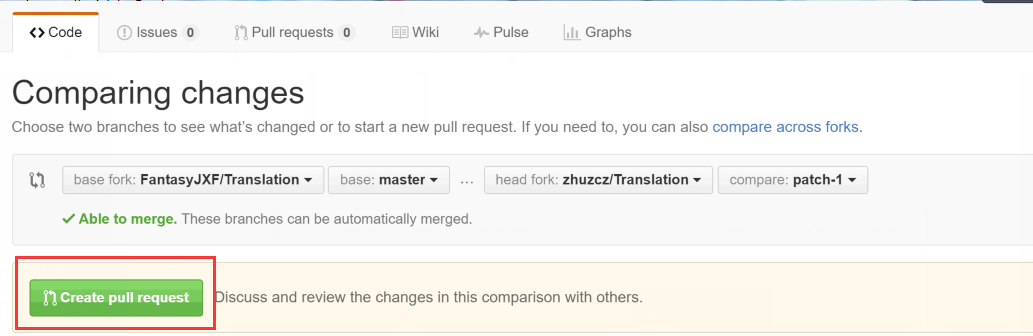
到这里为止,还只对你自己的仓库进行了修改,你需要new pull request提交分支到FantasyJXF的仓库,如下图,可以看出,如果只是少量的更改,建议使用网页端编辑。
按照官网的格式,我已经将各部分创建了文件夹,需要汉化的小节有有相应的.md文件,建议大家使用使用MarkdownPad或者Typora软件进行编辑,并上传即可。
最后还是诚邀志同道合的同志加入PX4中文维基的汉化组。
联系方式:qq: 931026752
qq群:499861916
顺颂商祺!
From Fantasy
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)