因为XXXX,需要对DJI的指令系统做研究,首先解析的是 LB2,也拆解了七七八八了,现在对LB2天空端DBUS口的数据协议进行解析,供电子/嵌入式同学进行学习研究。
DBUS采用4Pin线引出,猜测是使用串口协议,遥控器和天空端正常上电后,使用逻辑分析仪进行端口数据采集,其中一pin的波形如下:

波形间隔测得为11ms,也就是11ms发送一包数据。
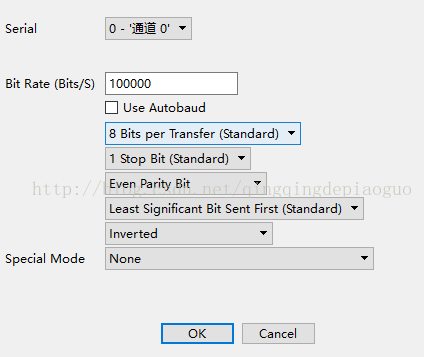
寻找波形中最小的一个脉冲,脉宽为10.21us,故波特率为100000,波形空闲时候为低电平,解析时需要设置反向电位,然后在设置偶校验,数据就能解析出来了,分析仪设置如下:
![]()
解析的数据:
![]()

继续解析,需要知道对应的通道数据,分别打舵,获得以下数据:
左右摇杆中位
0f 00 04 20 00 01 48 69 4a c3 07 00 00 00 00 00 00 00 00 00 00 00 00 50 00
俯仰最上
0f 00 a4 34 00 01 48 69 4a c3 07 00 00 00 00 00 00 00 00 00 00 00 00 50 00
航向最左
0f 00 04 20 00 d9 42 69 4a c3 07 00 00 00 00 00 00 00 00 00 00 00 00 50 00
油门最低
0f 00 04 20 5B 00 48 69 4a c3 07 00 00 00 00 00 00 00 00 00 00 00 00 50 00
横滚最右
0f 94 06 20 00 01 48 69 4a c3 07 00 00 00 00 00 00 00 00 00 00 00 00 50 00
可以看出,对四个摇杆进行动作,数据的第二位到第七位有变化,对这六位数据进行二进制显示
横滚最右
94 06 20 00 01 48
10010100 00000110 00100000 00000000 00000001 00101000
油门最低
00 04 20 5B 00 48
00000000 00000100 00100000 01011011 00000000 01001000
航向最左
00 04 20 00 d9 42
00000000 00000100 00100000 00000000 11011001 01000010
俯仰最上
00 a4 34 00 01 48
00000000 10100100 00110100 00000000 00000001 01001000
中位
00 04 20 00 01 48
00000000 00000100 00100000 00000000 00000001 01001000
可以观测出,这些数据也是采用SBUS思想进行通道打包,即每一个通道采用11位传输,摇杆中位时舵量为1024,舵量最大为1684,舵量最小为364。
本文仅供学习和参考~~就酱紫啦~
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)