原链接: https://community.bwbot.org/topic/520
运行测试平台:小强ROS机器人
速腾聚创16线激光雷达rslidar-16的供电是直流12v 3A,通信接口是rs485网络接口。小强ros开发平台用户可以用底盘dc电源头供电,主机的网口也可以直接连接雷达。下面介绍它的ros驱动安装和测试教程,如果是和小强平台一起购买的雷达,小强主机出厂时已经配置好驱动,请直接跳过安装部分。
1.在windows平台设置雷达网络接口参数
rslidar-16雷达的网络接口是静态ip分配方式,且需要用官方配置软件编辑它的固件才能设置网络参数。
使用速腾聚创官网提供的RSView-1.4.3软件,根据《RS-Lidar-16用户手册v3.7.pdf》手册设置雷达和主机的ip地址。因为主机往往还需要连接其他网络,因此最好按照下图设置成169.254.x.x网段,这个网段ubuntu默认为本地网络,不会干扰其它网络的运行。
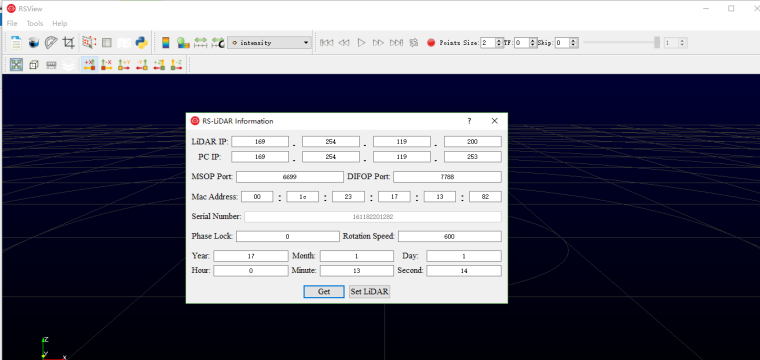
它的ros驱动也需要指定ip地址参数,为了后续教程的方便,请将ip地址按照上图的地址设成一模一样
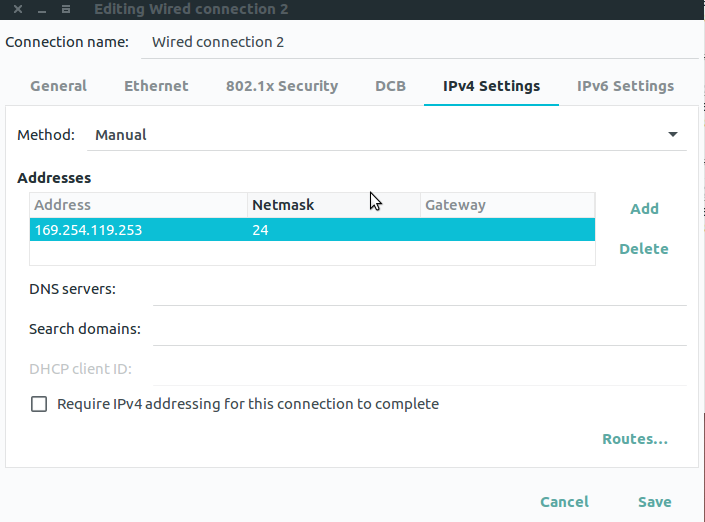
2.根据步骤1中的ip地址设置ros主机的有线网络
3.安装ros驱包ros_rslidar
#ros_rslidar需要安装到ros工作空间,以小强主机为例
cd ~/Documents/ros/src
git clone https://github.com/BluewhaleRobot/ros_rslidar_robosense.git
cd ..
catkin_make
4.将雷达接入电源,同时用网线连接ros主机,启动ros驱动launch文件
#下面aunch文件里面的ip地址可以根据实际设置,进行修改
roslaunch rslidar_pointcloud xiaoqiang_lungu.launch
#启动成功后,驱动节点默认会发布10hz的点云话题//rslidar_points,这个话题的frame_id是rslidar,上面的launch文件也发布了base_link到rslidar的tf关系,请根据实际安装参数进行调整。
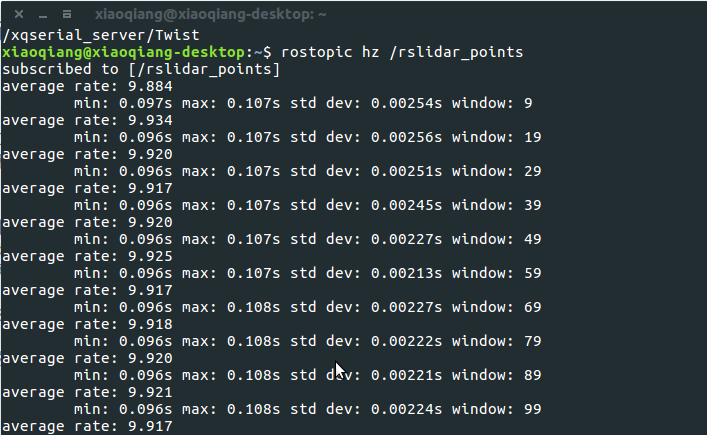
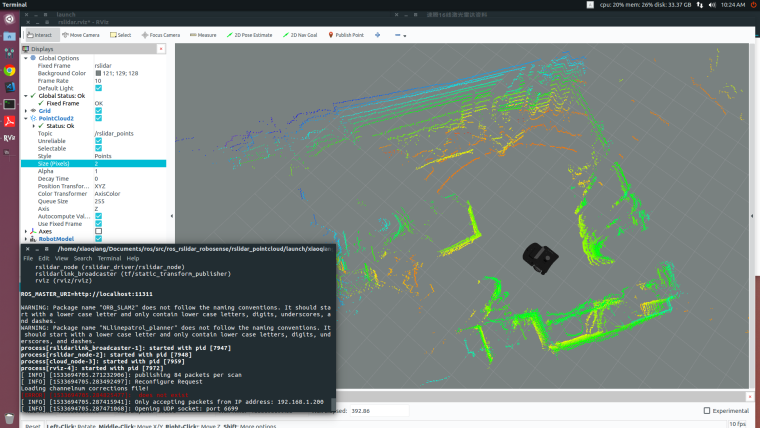
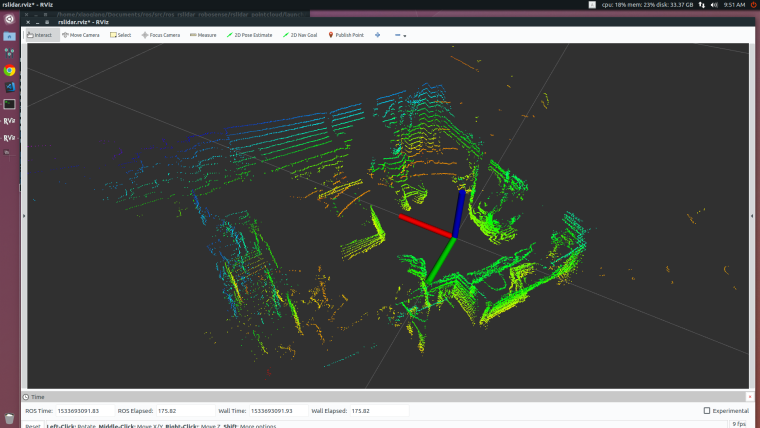
6.在rviz中显示发布的点云数据
roscd rslidar_pointcloud/rviz_cfg/
rviz -d rslidar.rviz
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)