使用STM32F1, F4,L1等系列MCU的SPI时,不用hal库自带的收发函数时我们会用下面这种收发函数:
/* 收发一个字节 */
uint8_t SPI_Rw_Byte(uint8_t data)
{
while(__HAL_SPI_GET_FLAG(&SPI_Handle, SPI_FLAG_TXE) == RESET);
SPI_Handle.Instance->DR = data;
while(__HAL_SPI_GET_FLAG(&SPI_Handle, SPI_FLAG_RXNE) == RESET);
return SPI_Handle.Instance->DR;
}
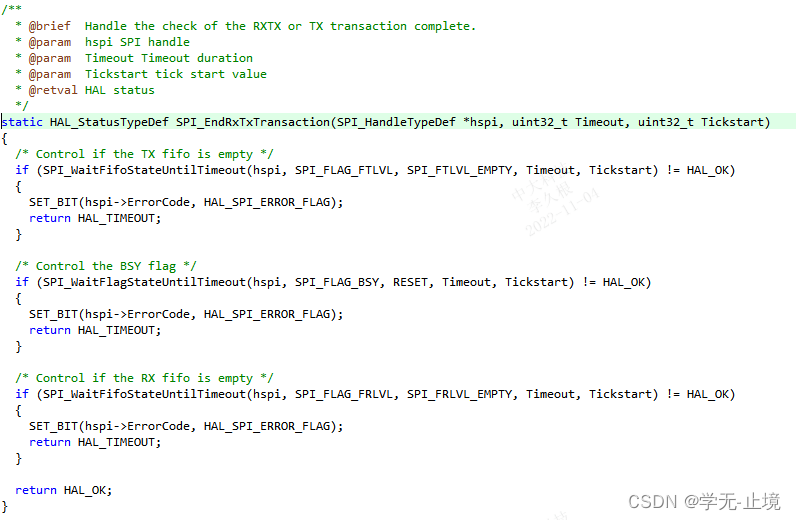
但是测试发现这个函数在STM32L4系列上面就出现收发不正常的问题,但是调用hal库自带的收发函数没问题,经检查发现L4系列的MCU带有两个FIFO,分别是RXFIFO,TXFIFO,发送一字节数据时如果不将DR寄存器指针转为uint8_t类型,上述代码“SPI_Handle.Instance->DR = data;”这条语句就会发送两个字节出去,会导致接收出现异常。同时L4系列SPI收发数据时应该检查FIFO是否为空。如下图所示官方HAL库收发函数中就带有判断。

最后当你对这个系列SPI收发还不太明白时还是建议使用HAL库自带的收发函数, 虽然比较繁琐但是比较稳定,如果要追求效率就参考下面代码(以下代码不使用FIFO就一个字节一个字节收发):
/* 收发一个字节 */
uint8_t SPI_Rw_Byte(uint8_t data)
{
while(__HAL_SPI_GET_FLAG(&SPI_Handle, SPI_FLAG_TXE) == RESET);
*((__IO uint8_t*)&SPI_Handle.Instance->DR) = data;
while(__HAL_SPI_GET_FLAG(&SPI_Handle, SPI_FLAG_RXNE) == RESET);
return SPI_Handle.Instance->DR;
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)